







 本文介绍如何使用matplotlib的GridSpec模块进行复杂图形布局,通过示例代码展示如何在一个4x4网格中放置7张图,实现每行两张图,最后一张图居中的效果。适合需要精确控制子图位置的高级绘图需求。
本文介绍如何使用matplotlib的GridSpec模块进行复杂图形布局,通过示例代码展示如何在一个4x4网格中放置7张图,实现每行两张图,最后一张图居中的效果。适合需要精确控制子图位置的高级绘图需求。
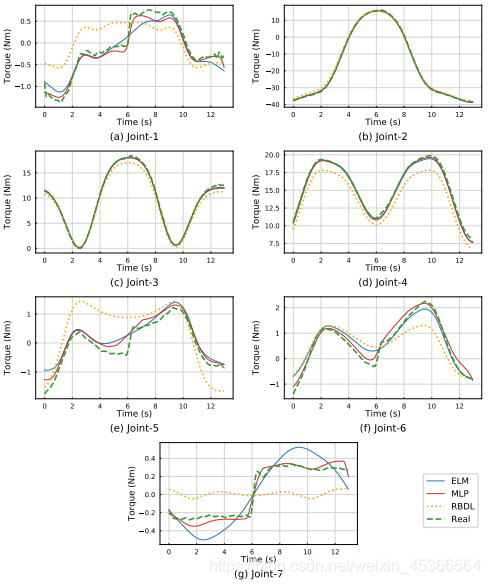
效果
7张图,每行两张,最后一张位于中间
方法
使用matplotlib.gridspec
-
分成四行四列
gs = gridspec.GridSpec(4, 4) -
每行第一张图占0,1 位;第二张图占2,3位;最后一行的图占1,2位
即:plt.subplot(gs[行, 列])# position if (joint%2==0 and joint != 6): ax = plt.subplot(gs[int(joint/2), :2]) # 第一张图占0,1 位 elif (joint == 6): ax = plt.subplot(gs[int(joint/2), 1:3]) # 最后一行的图占1,2位 else: ax = plt.subplot(gs[int(joint/2), 2:]) # 第二张图占2,3位
完整代码
import matplotlib.gridspec as gridspec
def show_results(robot_name, file_test_list, joint=None):
joint_range = []
if joint is None:joint_range = range(0,7)
else:joint_range = range(joint,joint+1)
letter = list(map(chr, range(ord('a'), ord('z') + 1)))
mlp_folder = robot_name+"_(50,50,20)"
plt.figure(robot_name,figsize=(6,7.3))
gs = gridspec.GridSpec(4, 4)
for joint in joint_range:
elm_model = robot_ELM(joint)
X_test, T_test = elm_model.loadData(file_test_list)
##### ELM ####
model = joblib.load(func.get_module_path("../../training_model/"+robot_name)+"/"+robot_name+"9-16,tanh,r=200/joint_"+str(joint)+".pickle")
# model = joblib.load(func.get_module_path("../../training_model/param_selection/9-16,tanh")+"/"+robot_name+"/joint_"+str(joint)+".pickle")
# model_sf = joblib.load(func.get_module_path("../../training_model/param_selection/9-16,tanh,sf/blue")+"/joint_"+str(joint)+".pickle")
# model = joblib.load(func.get_module_path("../../training_model/param_selection/9-16,sigm,sf/blue")/joint_"+str(joint)+".pickle")
#### MLP ####
mlp = joblib.load(func.get_module_path("../../training_model/MLP/"+mlp_folder)+'/joint_'+str(joint)+'.pickle')
# mlp_sf = joblib.load(func.get_module_path("../../training_model/MLP/"+mlp_folder)+',sf/joint_'+str(joint)+'.pickle')
# mlp_nosf = joblib.load(func.get_module_path("../../training_model/MLP/"+mlp_folder)+',nosf/joint_'+str(joint)+'.pickle')
##### Transfer learning ######
## Two-layer
# model1 = joblib.load(func.get_module_path("../../training_model/trsf1")+"/trsf1_"+robot_name+"_bs_blue9-16,tanh,r=200,m=1/joint_"+str(joint)+".pickle")
# model2 = joblib.load(func.get_module_path("../../training_model/trsf1")+"/trsf1_"+robot_name+"_bs_blue9-16,tanh,r=200,m=2/joint_"+str(joint)+".pickle")
## Three-layer
# model1 = joblib.load(func.get_module_path("../../training_model/trsf2")+"/trsf2_"+robot_name+"_bs_blue_red9-16,tanh,r=100,m=1/joint_"+str(joint)+".pickle")
# model2 = joblib.load(func.get_module_path("../../training_model/trsf2")+"/trsf2_"+robot_name+"_bs_blue_red9-16,tanh,r=100,m=2/joint_"+str(joint)+".pickle")
O_test = model.predict(X_test)
O_mlp = mlp.predict(X_test).reshape(-1,1)
# plot position
if (joint%2==0 and joint != 6): ax = plt.subplot(gs[int(joint/2), :2])
elif (joint == 6): ax = plt.subplot(gs[int(joint/2), 1:3])
else: ax = plt.subplot(gs[int(joint/2), 2:])
# if(joint == 6): ax = plt.subplot(3,3,joint+2)
# else: ax = plt.subplot(3,3,joint+1)
# plt.figure(robot_name+" Joint "+str(joint))
func.plot_figure(target=elm_model.get_tau_r_f(),
elm=O_test+elm_model.get_tau_m(),
rbdl=elm_model.get_tau_m(),
mlp=O_mlp+elm_model.get_tau_m(),
# shuffle=O_mlp_sf+elm_model.get_tau_m(),
# shuffle=O_shuf+elm_model.get_tau_m(),
# transfer_1=O_test1+elm_model.get_tau_m(),
# transfer_2=O_test2+elm_model.get_tau_m(),
fs=100,
joint_i=None)
plt.subplots_adjust(hspace=0.43,wspace=0.7)
ax.set_xlabel("Time (s)",fontsize=6.5)
ax.set_ylabel("Torque (Nm)",fontsize=6.5)
ax.xaxis.set_label_coords(0.5, -0.11)
ax.yaxis.set_label_coords(-0.12, 0.5)
ax.tick_params(direction='in', axis="both", labelsize=5, width=0.5, length=1)
plt.grid(b=True, which='major', color='lightgrey', linestyle='-', linewidth=0.4)
for axis in ['top','bottom','left','right']:
ax.spines[axis].set_linewidth(0.5)
if joint == 6:
plt.rcParams["mathtext.fontset"] = "cm"
plt.rcParams['text.latex.preamble']=[r"\usepackage{lmodern}"]
# leg = plt.legend(loc = "best", fontsize=5.5, framealpha=0.7)
# leg.get_frame().set_linewidth(0.8)
plt.legend(bbox_to_anchor=(1.62,0.71), borderaxespad = 0.2, fontsize=6.5) #loc='lower right'
ax.set_title('('+letter[joint]+') '+'Joint-'+str(joint+1), y=-0.4, fontsize=7.5)
savepath = "."
plt.savefig(savepath, bbox_inches='tight')

















 3645
3645

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









