






使用RealSense L515相机,安装realsense-viewer后在终端开启。
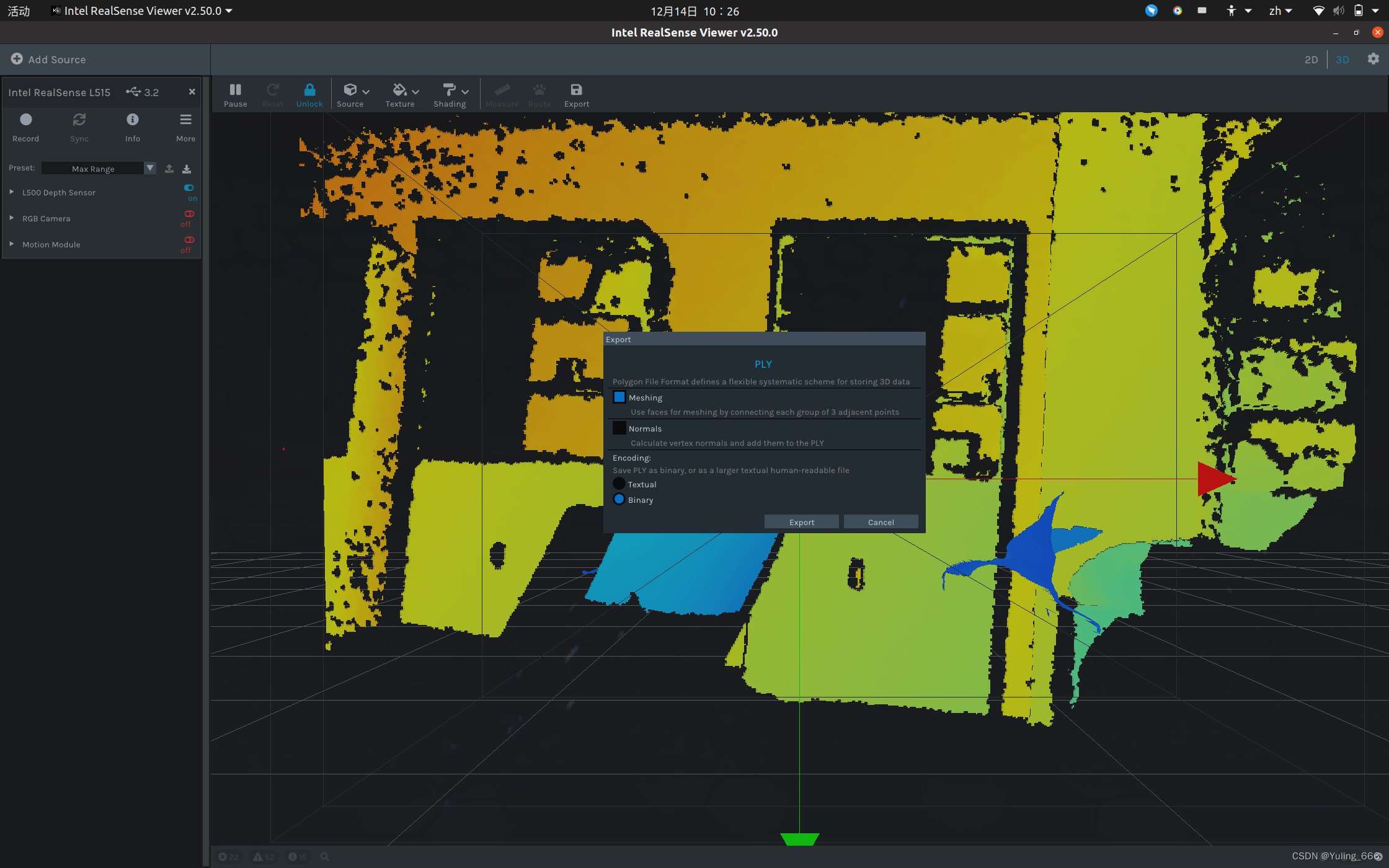
右上角切换到3D模式,点击export按钮,即可进行点云ply文件的拍摄保存。
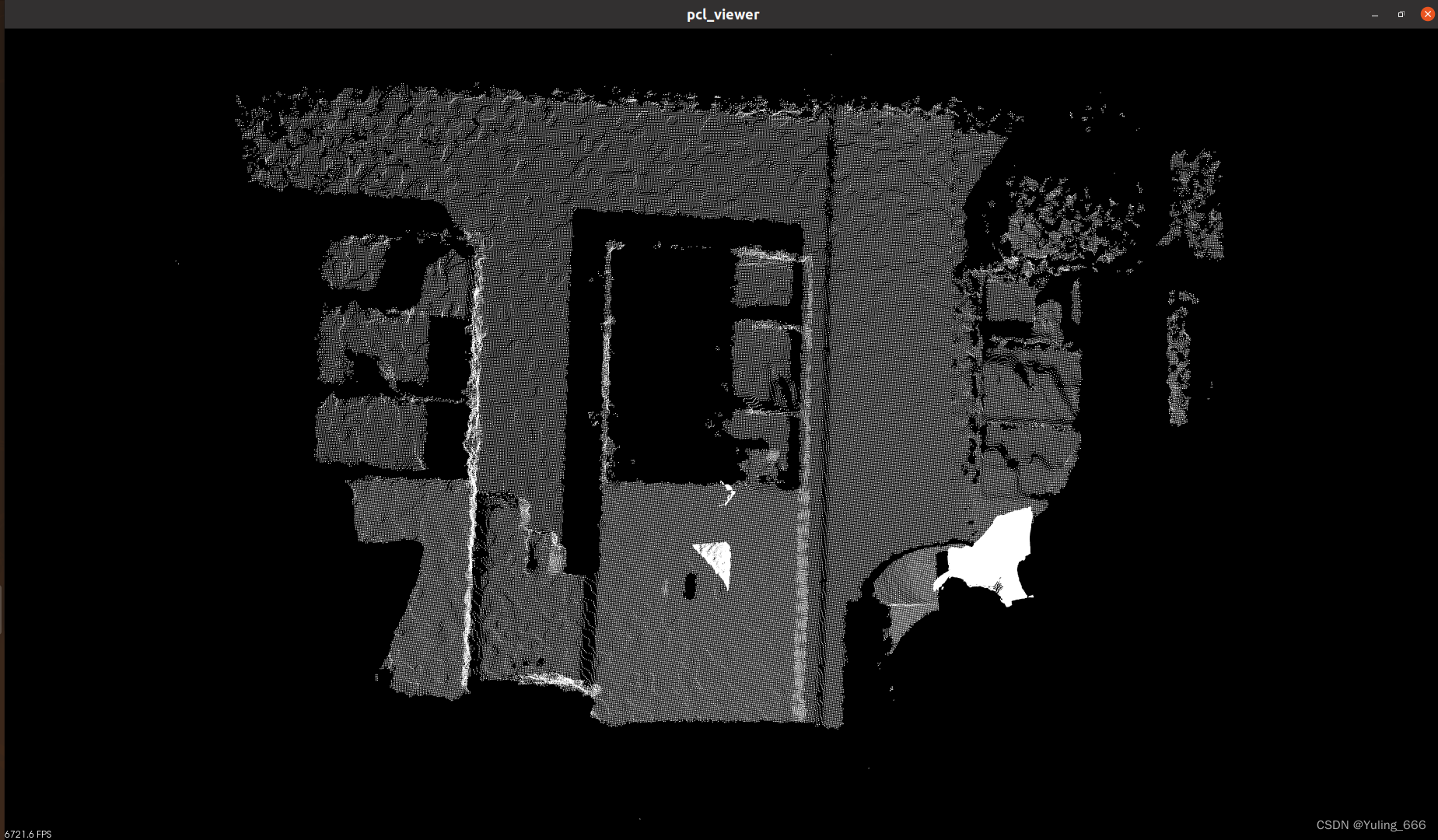
下面使用PCL进行点云文件的可视化,结果如下。
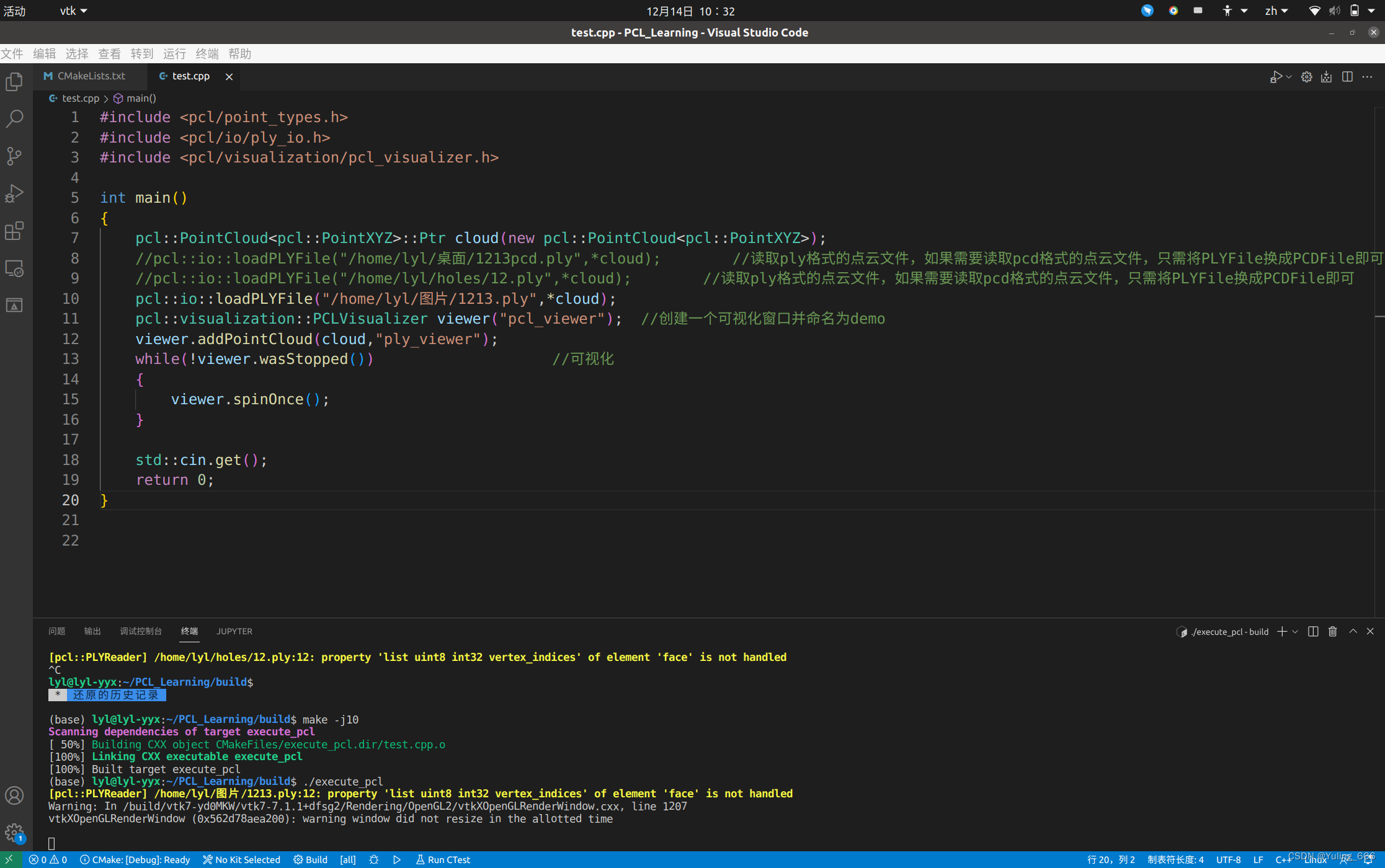
代码如下:
#include <pcl/point_types.h>
#include <pcl/io/ply_io.h>
#include <pcl/visualization/pcl_visualizer.h>
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
//pcl::io::loadPLYFile("/home/lyl/桌面/1213pcd.ply",*cloud); //读取ply格式的点云文件,如果需要读取pcd格式的点云文件,只需将PLYFile换成PCDFile即可
//pcl::io::loadPLYFile("/home/lyl/holes/12.ply",*cloud); //读取ply格式的点云文件,如果需要读取pcd格式的点云文件,只需将PLYFile换成PCDFile即可
pcl::io::loadPLYFile("/home/lyl/图片/1213.ply",*cloud);
pcl::visualization::PCLVisualizer viewer("pcl_viewer"); //创建一个可视化窗口并命名为demo
viewer.addPointCloud(cloud,"ply_viewer");
while(!viewer.wasStopped()) //可视化
{
viewer.spinOnce();
}
std::cin.get();
return 0;
}

















 744
744

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









