







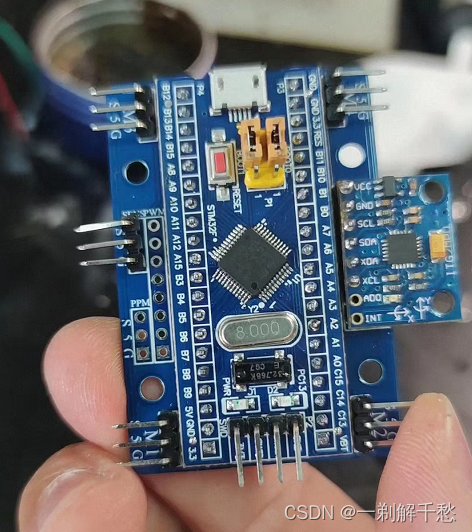
飞控部分:
介绍:使用stm32c8t6和mpu6050制作一款低价飞控,固件用的是开源的betaflight_3.2.5_NAZE,飞行噪声很小,可能是桨叶好,乾丰5寸3叶桨。
原理图: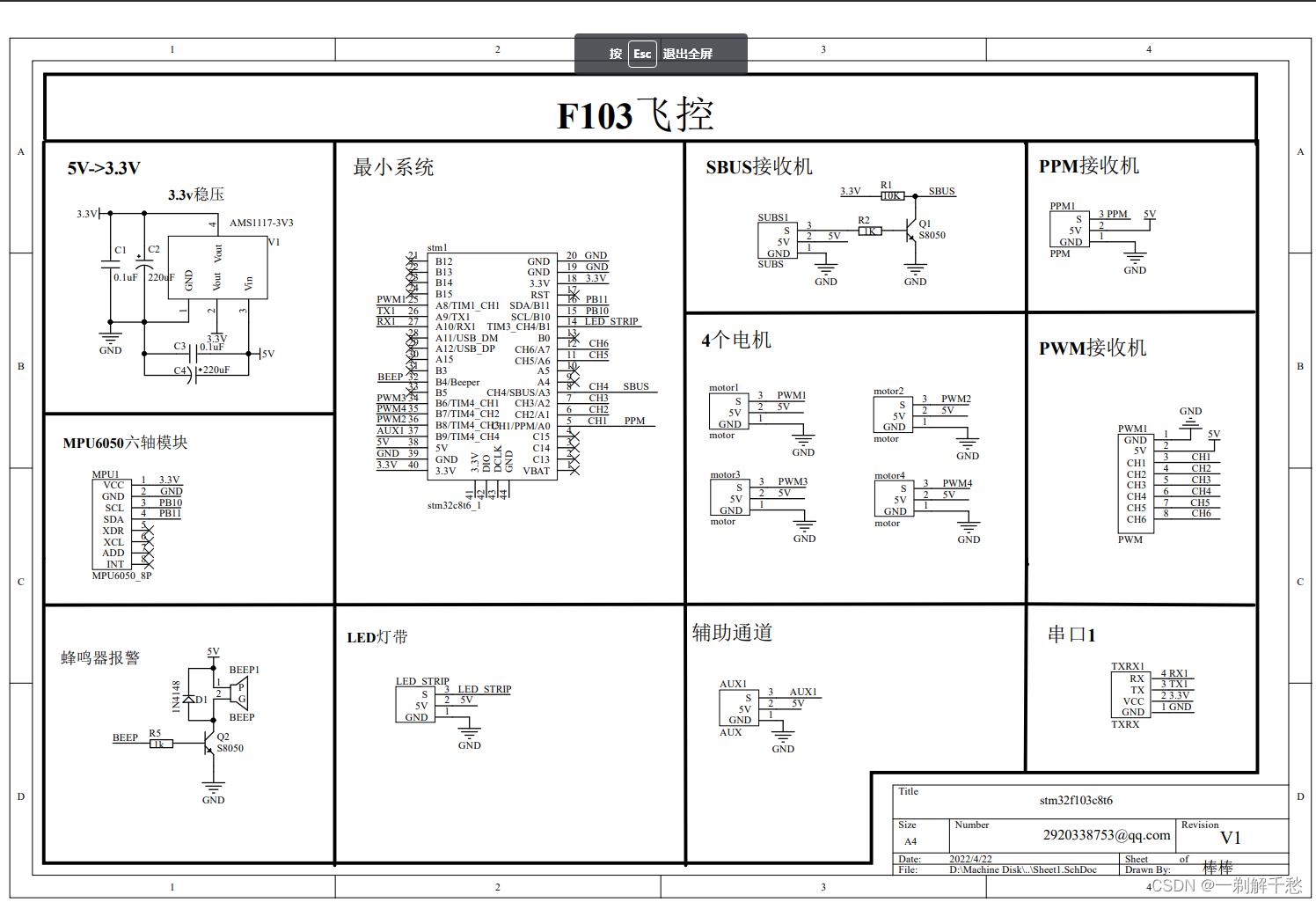
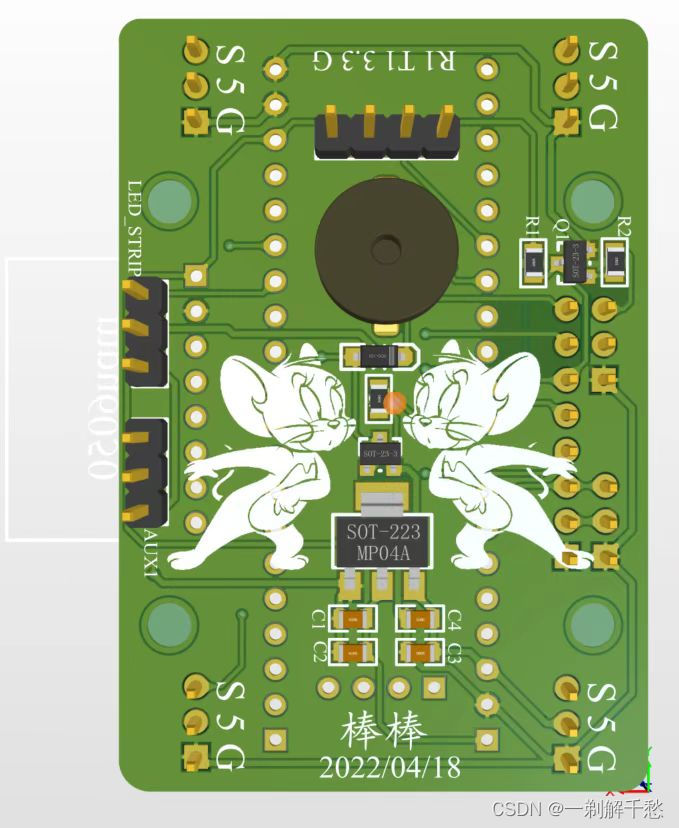
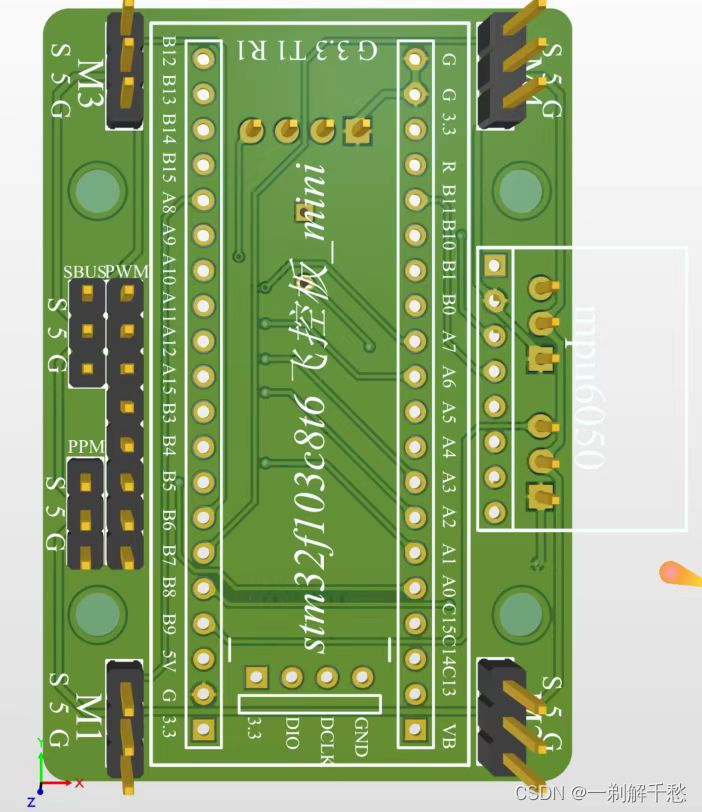
PCB:
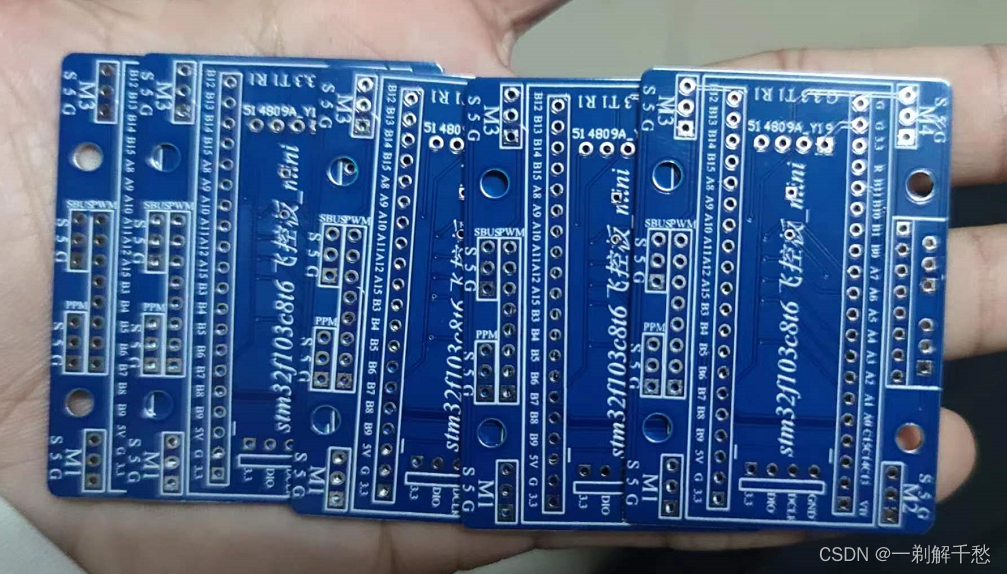
拿到嘉立创打样后:
焊接:
飞控需要单独5v供电,随便找了各降压模块,某宝大概3元钱,插入3s电池,调节旋钮,电源稳压到5v,再接入飞控。

刷固件betaflight_3.2.5_NAZE,然后输入CLI命令,配置飞控。
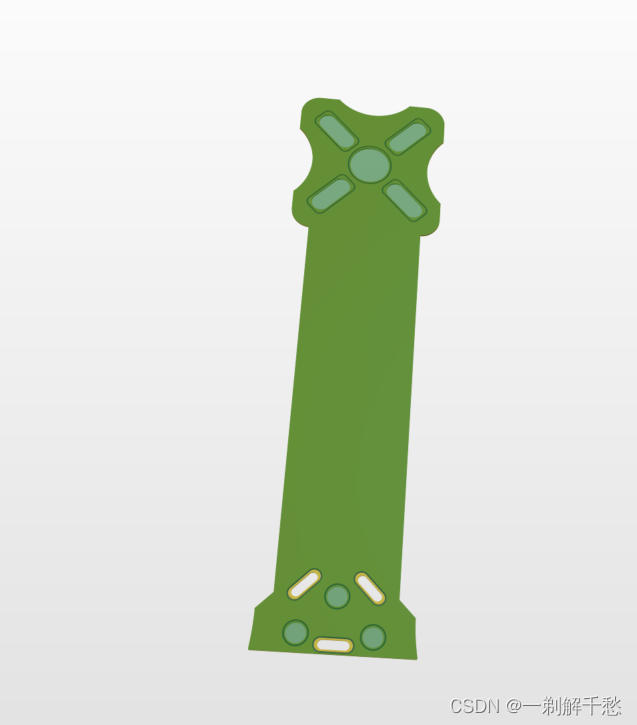
机身部分:
全身采用PCB,每部分在1010cm内,这样嘉立创免费打样,坏了也好免费更换
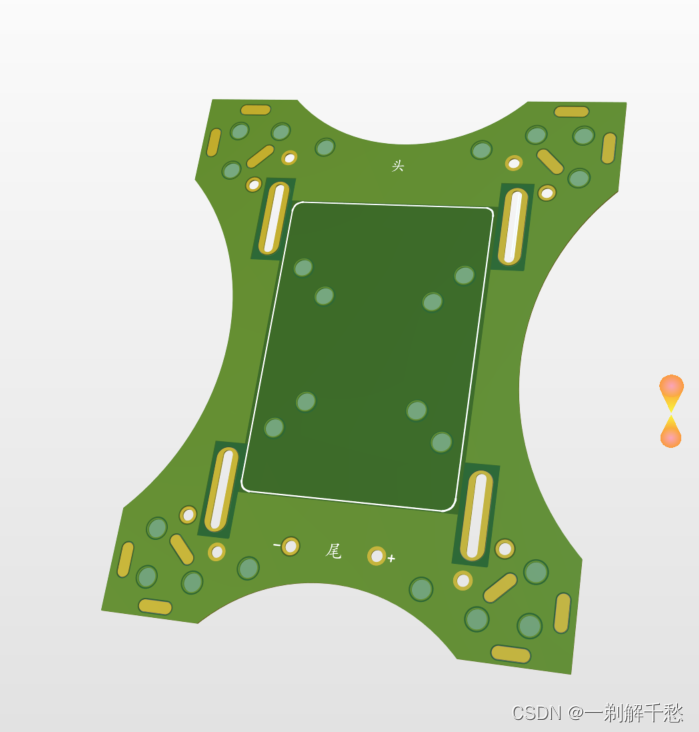
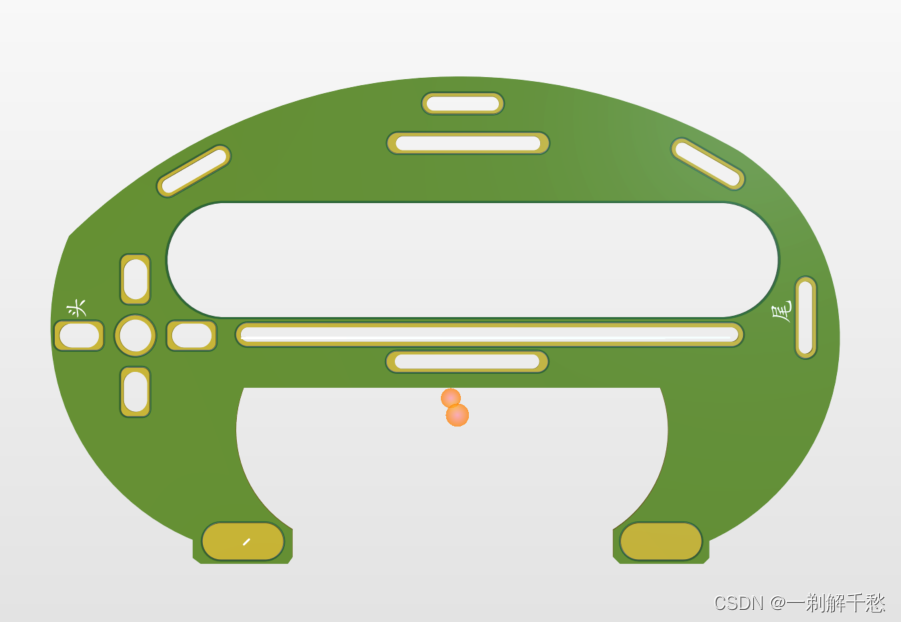
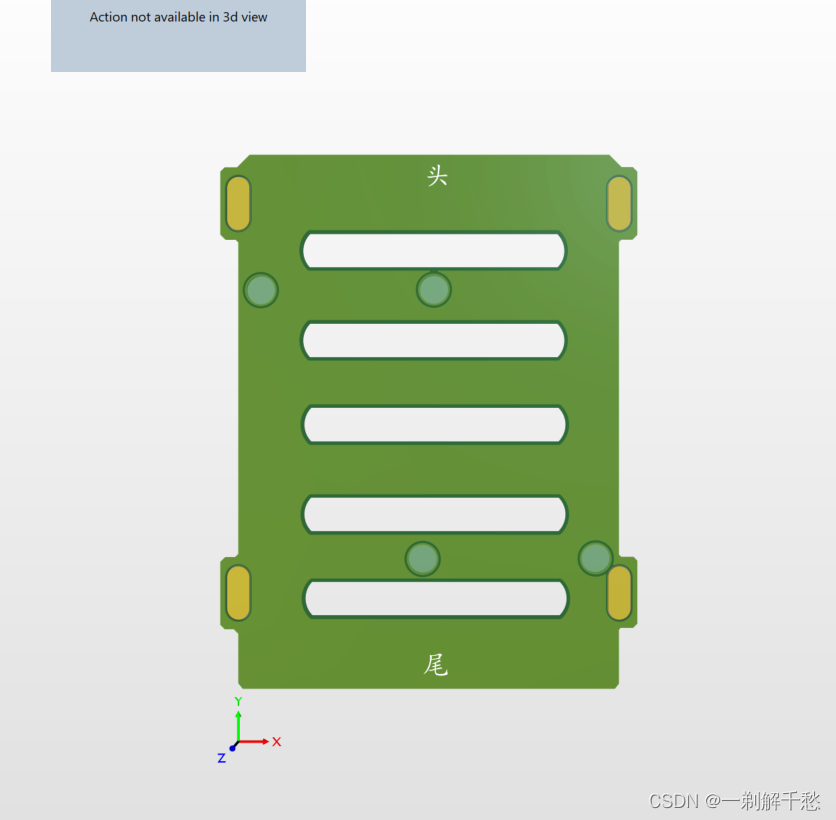
各部分PCB 3D效果图:
一套:机臂8,中间底板2,电池与飞控仓侧板2,横梁*4


组装机架:



闲鱼买了个四合一电调,60元,电调安装在飞控上层,
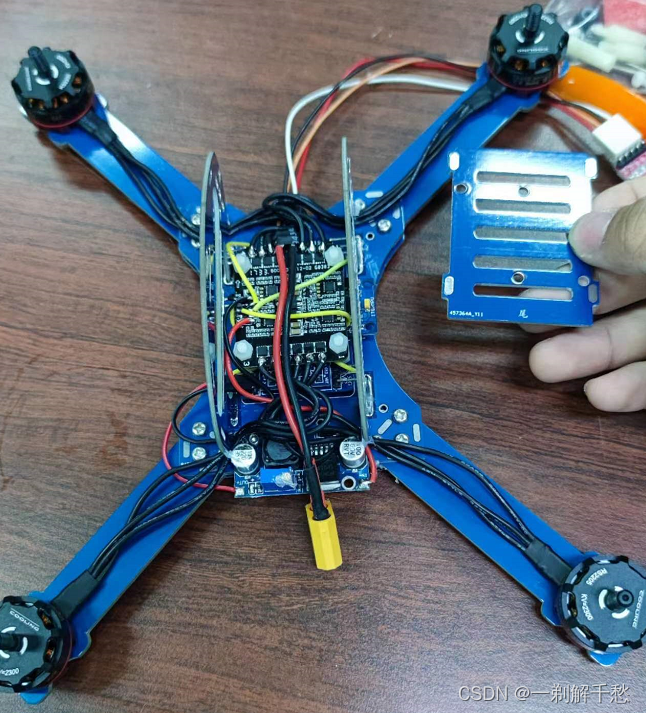
安装好后,盖上分层板,此层用来放电池

吃完师弟的核桃,拿起来看看~

一层有点软,弄两层,就硬多了,结实,和碳纤维的差不多。紫色的是我第一版的机臂,还能凑合用。本着低成本、废物利用的原则,采用快递减震用的这种材料

整机重量:

准备起飞:

试飞视频:
【c8t6+mpu6050+PCB机架-哔哩哔哩】
【某鱼连接】https://m.tb.cn/h.fH2bU6L?tk=9lGB2kyxiwc
点击链接直接打开


















 5975
5975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









