






故事的起因是在 2025 年初,我在微信公众号上偶然看到大疆新发布了 DJI O4 图传 天空端,起初我还以为是一款新的无人机,毕竟大疆出品的速率还是挺快的,可当我打开那篇推文才发现并非如此,仔细一看才知道那是FPV中的一款配件。

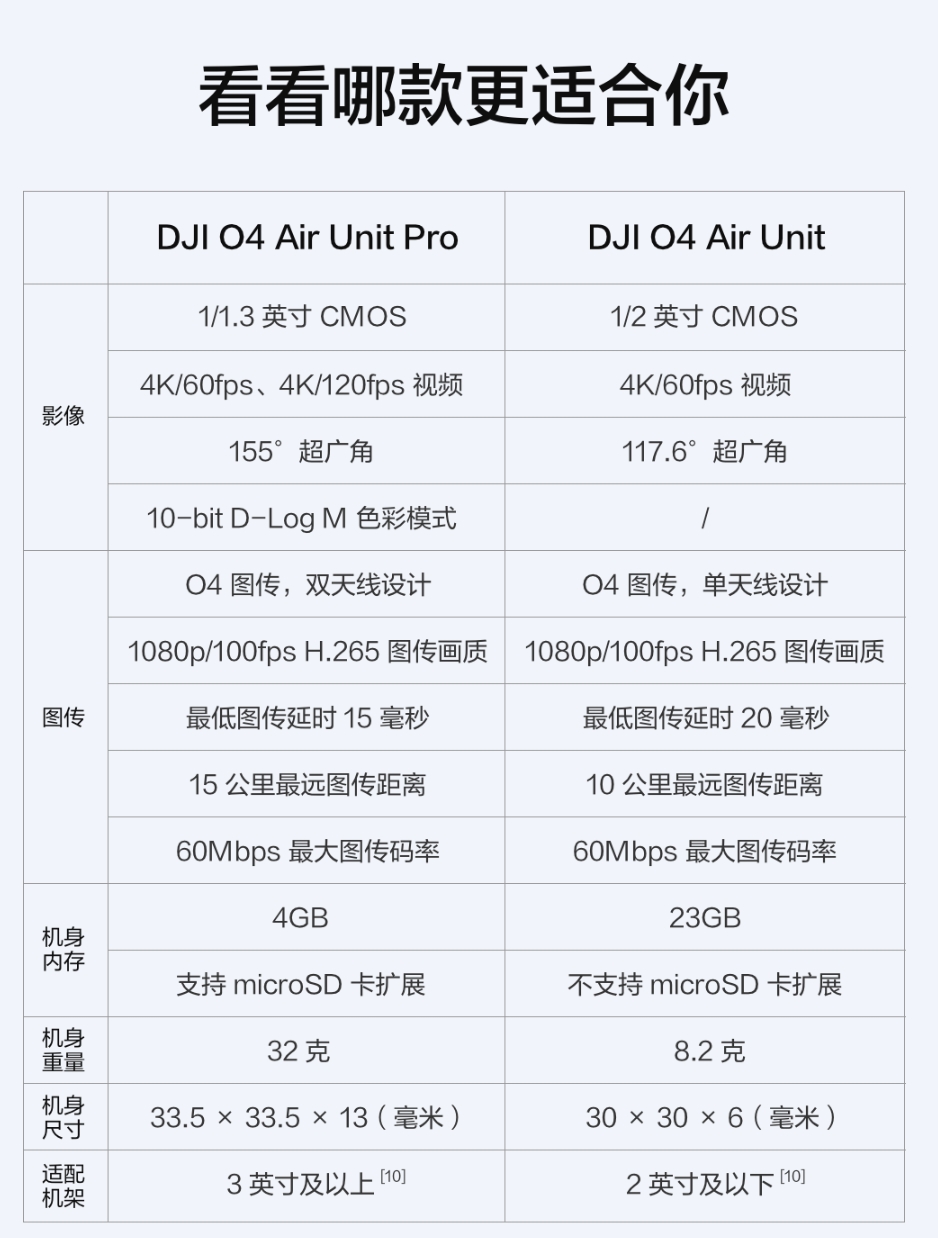
于是我又查了一下FPV的相关资料和视频,才明白FPV不仅仅是我之前所想的那种穿越机,这里面别有洞天,以下是我对FPV的理解:相较于消费级无人机,比如大家所熟知的DJI mini4K、DJI mavic3 pro等,穿越机的速度更快(5寸穿越机的速度通常在200km/h左右),入门门槛更高,它没有自主悬停模块,也没有避障功能,但也正是因为速度较快,所以只要安装上广角镜头,搭配飞行眼镜,就可以看见极具新奇的视角,不仅如此,大部分FPV玩家都是通过自己组装各种配件入的坑,可以按照自己的想法设计自己的穿越机,这就大大增加了FPV的可玩性。于是,我心里就埋下了一颗飞行FPV的种子,期待着有一天能够遥控自己的穿越机飞行天空。



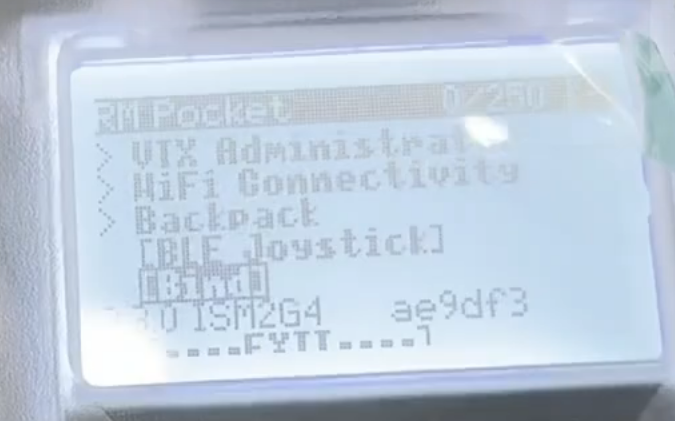
经过了期末周和大半个寒假,我下定决心组装一台自己的穿越机,但我又担心寒假就剩下没几天估计完不成这个小项目,于是我就买了一个兼具蓝牙连接电脑和对频连接实物飞机的遥控器即RadioMaster Pocket遥控器ELRS版,我的遥控器是美国手,油门不回中,又在steam上买了一款模拟器TRYP FPV,之后就是在模拟器上练习飞行,由于我在网上没有找到比较系统的练习教程,只能去自己学习飞行,一开始确实很晕,各个摇杆的功能也不明白,好在后来又刷到了遥控器校准教程才明白各个摇杆的功能,油门.....,接着就是加以练习,好在TRYP FPV中的地图很大也很多,还能够选择运动项目进行跟拍练习,于是我就在这款游戏中度过了寒假最后的那几天。大家在练习模拟器的时候,不一定必须学会各种花飞动作,但必须学会起飞、悬停、控高以及降落,这几点非常有必要。


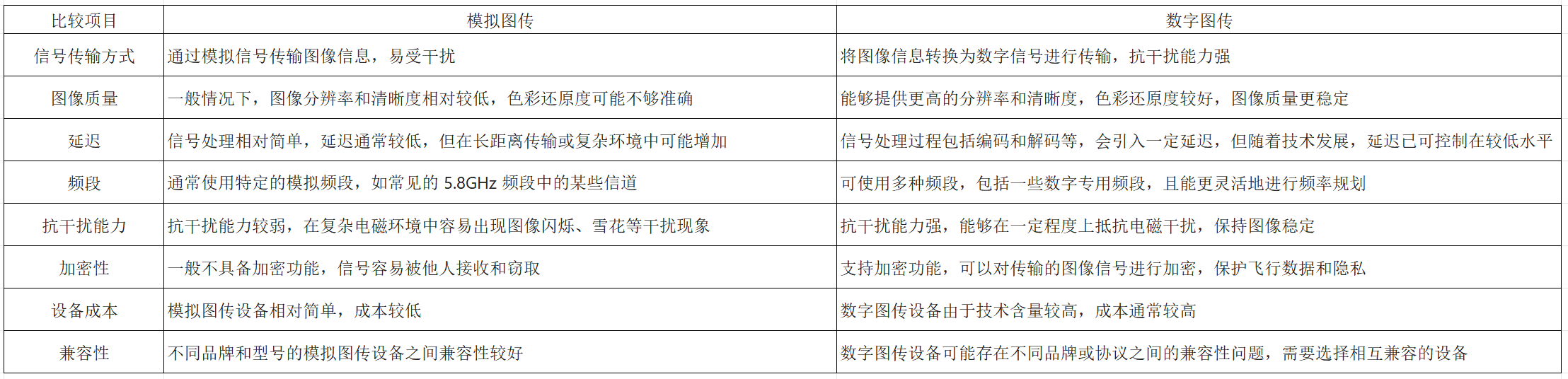
后来回到学校,我就开始了我的FPV的装机之旅:看各种教程买各种配件,由于我是学生党,预算有限,就选择了模拟图传方案。 预算充足的情况下建议选择数字图传,相较于模拟图传,数字图传更加清晰,价格也更昂贵,体验感更好,但模拟图传延时更低,也更便宜。
以下是我在视频教程和论坛的建议下选购的组件:
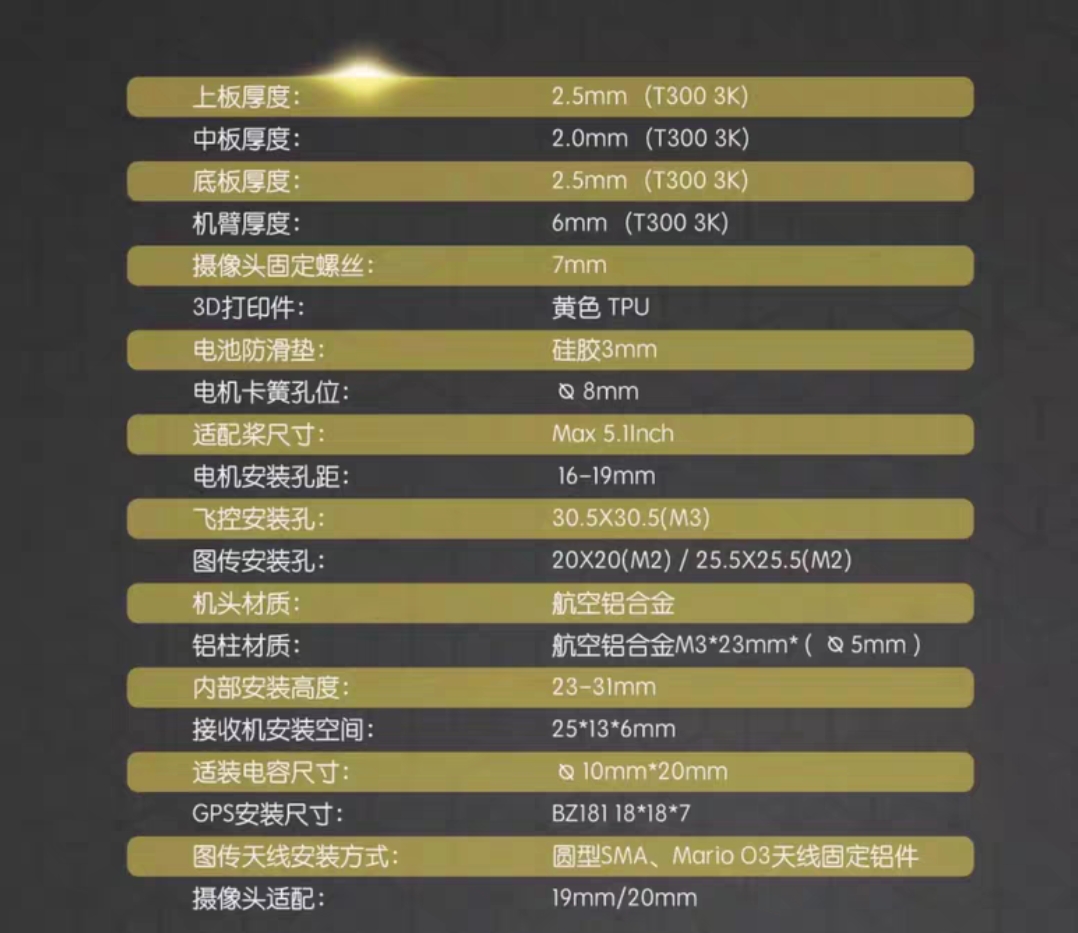
- SpeedyBee Mario 5寸XH进阶版 穿越机机架 淘宝购买 ¥244.14
- SpeedyBee F405 V3 F4飞塔50A STACK 淘宝购买 ¥389
- Caddx蜗牛平头哥二代FPV摄像头2.1mm镜头 淘宝购买¥130.5
- 瑞速科技RATE ELRS2.4G接收机加90mm长天线 淘宝购买 ¥49.4
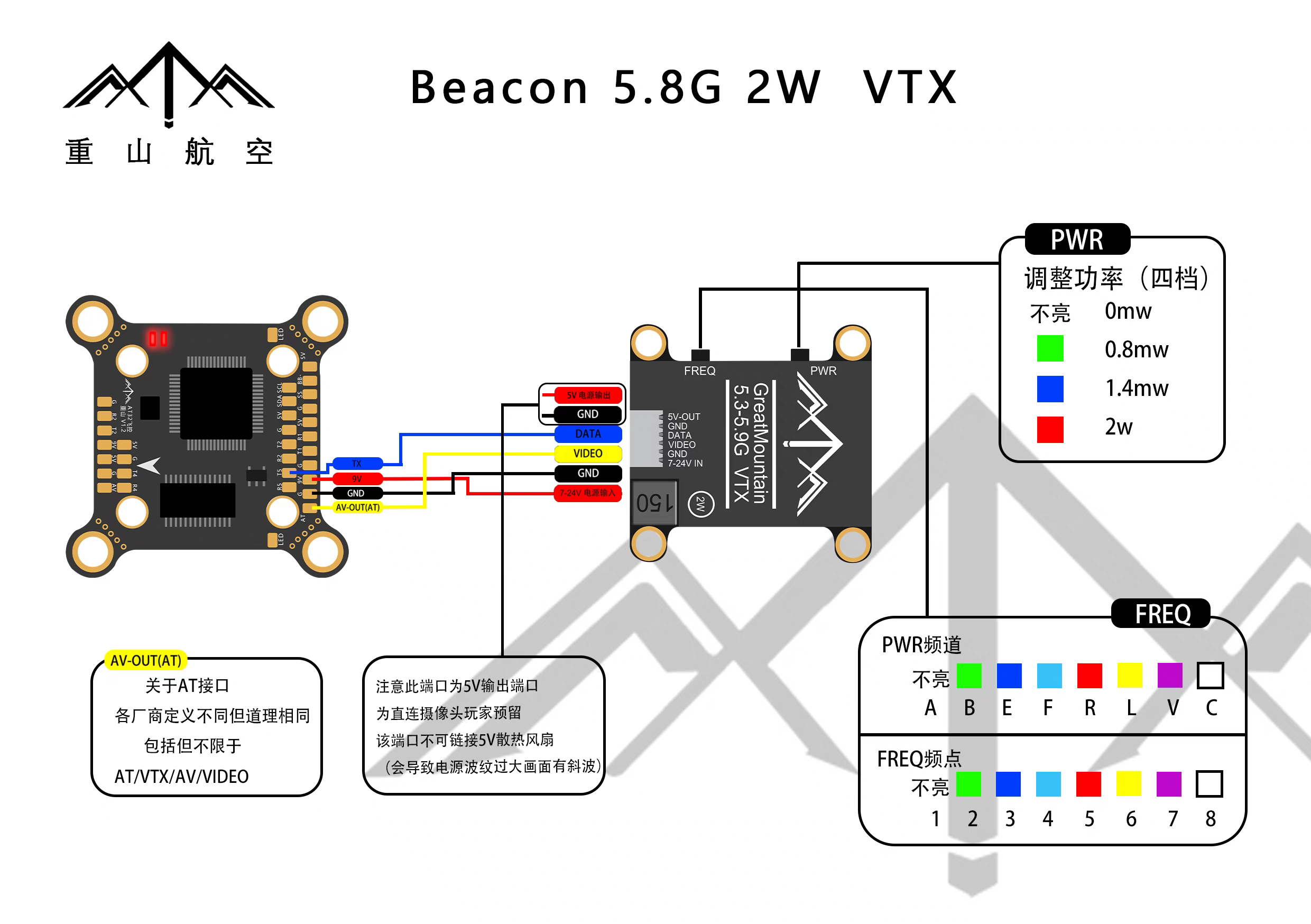
- 重山航空Beacon 5.8G 2W FPV模拟图传+12cm鼠尾天线 淘宝购买 ¥124
- RadioMaster POCKET遥控器ELRS版+2*18650电池 拼多多购买 ¥399
- 丰云无刷电机*4 6S1950kv 买网友的 ¥145
- 4个机翼*5套 买网友的 ¥30
- 电池*2 6S格氏1050 买网友的 ¥50
除了这些组件,我建议大家可以再买一个GPS和BB响LED,防止炸机后找不到。
除上述之外,还需要一些组装时用的工具:
- T12电烙铁焊台+烙铁架 淘宝购买 ¥88.75
- 德力西焊锡丝 99.3%无铅焊丝0.6(50克) 淘宝购买 ¥19.8
- 电子万用表+电池 淘宝购买 ¥20
- 白嫖学生会部门一把尼龙扎带
- 还有各种高精度工具和螺丝等,网购很便宜,但就是需要等,费时间。
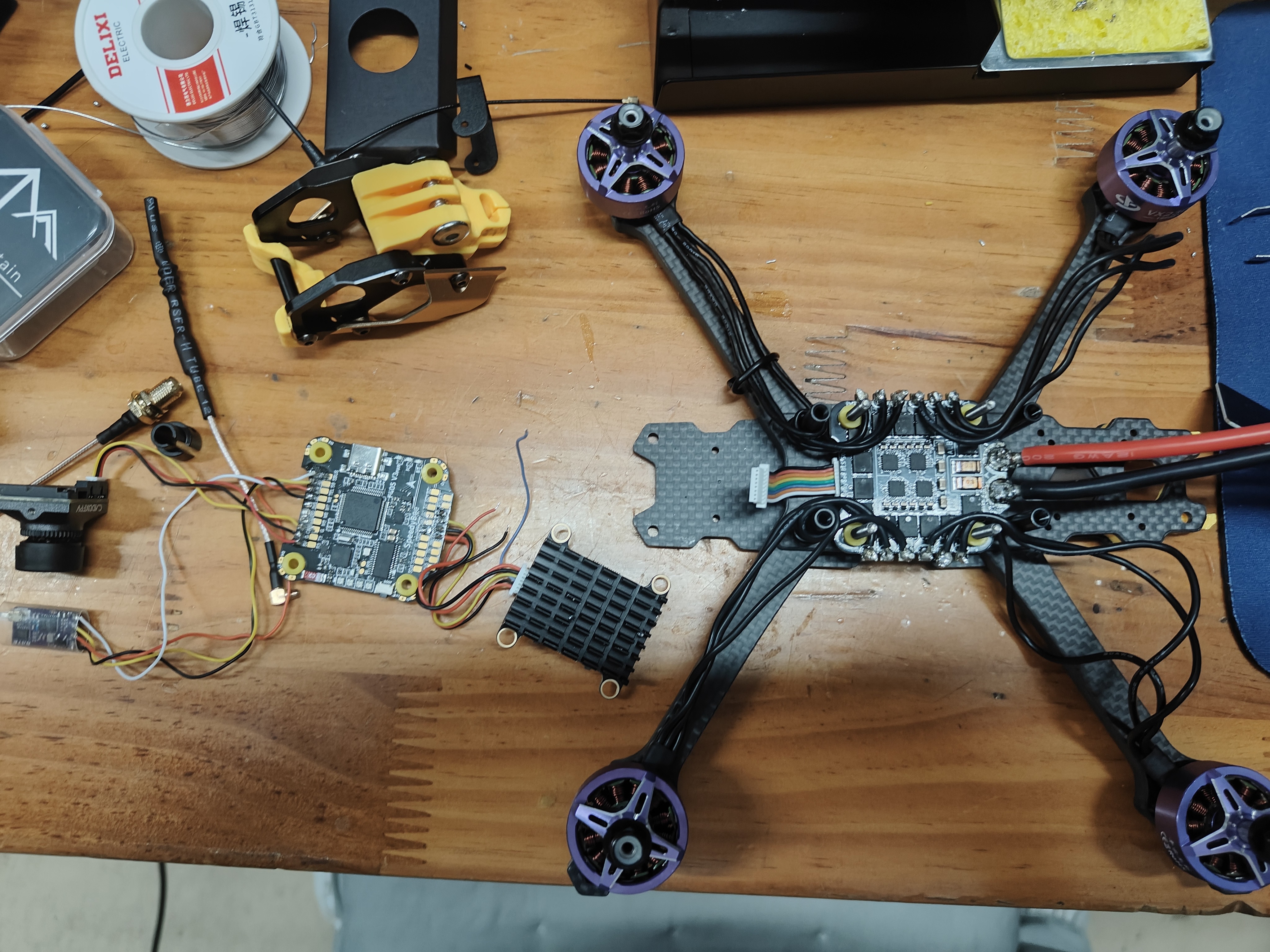
在陆陆续续买到各种配件之后,我就开始跟着网上的教程开始组装。
首先是机架,因为机架是最先买也是最先到的,我买的是5寸穿越机机架,大家买的时候记得提前查看机架的详细数据,买与相应机架适配的其他组件,尤其是飞控和图传安装孔,另外,建议新手入坑的话首选1S圈圈机,安全系数高、耐炸,不过,我个人感觉5寸穿越机也可以,毕竟,想长玩FPV的话应该都绕不过5寸穿越机的。


机架组装好之后就是安装电调和电机,对准孔位安装好就可以焊接了,准备好焊笔先预锡笔头和焊点,在电焊之前建议去哔站学习一下电焊教程,控制温度在350左右,焊好3*4根电线,不用在意每组三根电线的前后顺序,后续地面站调参时能解决。焊接的时候注意通风,注意安全!
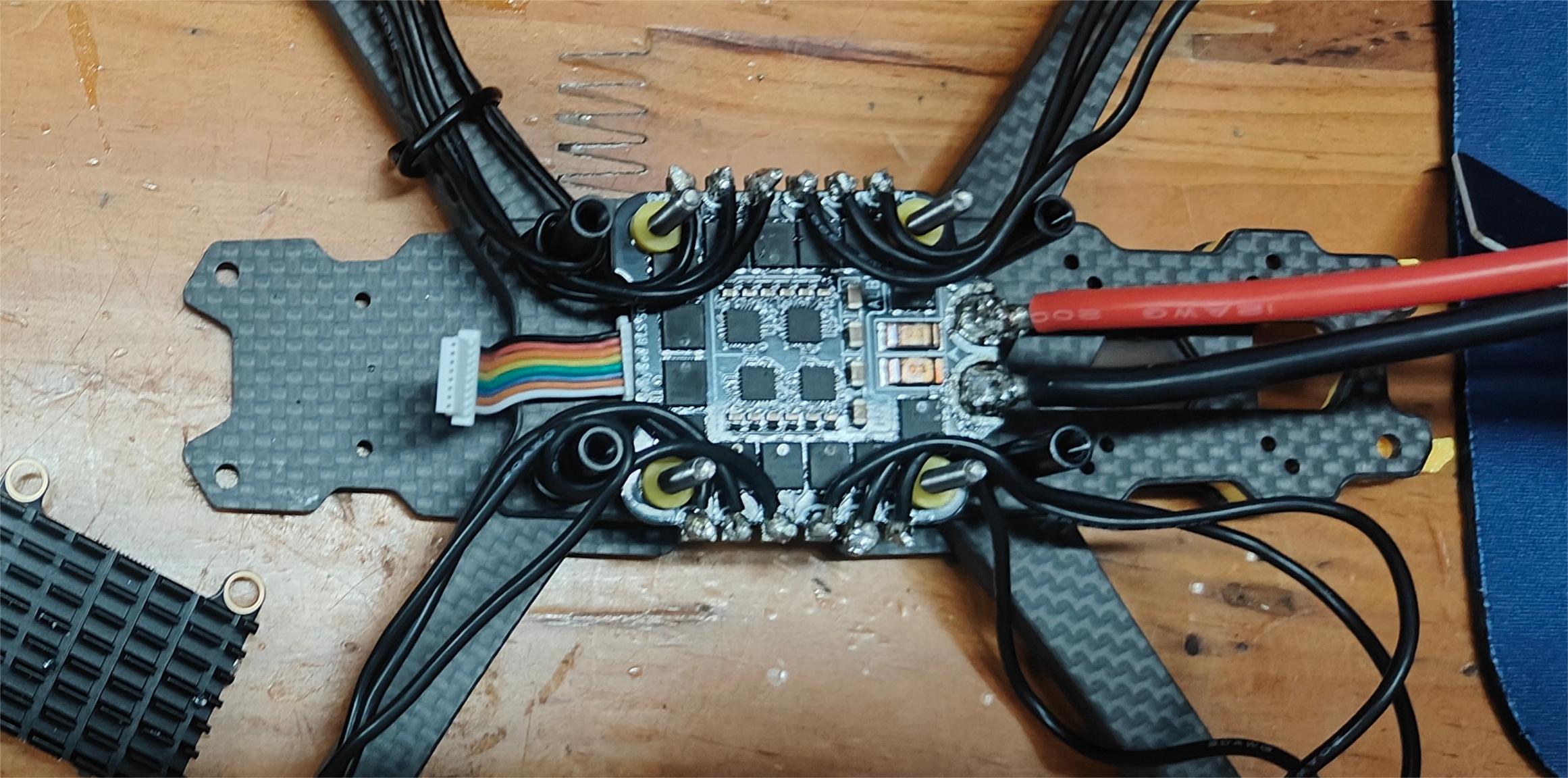
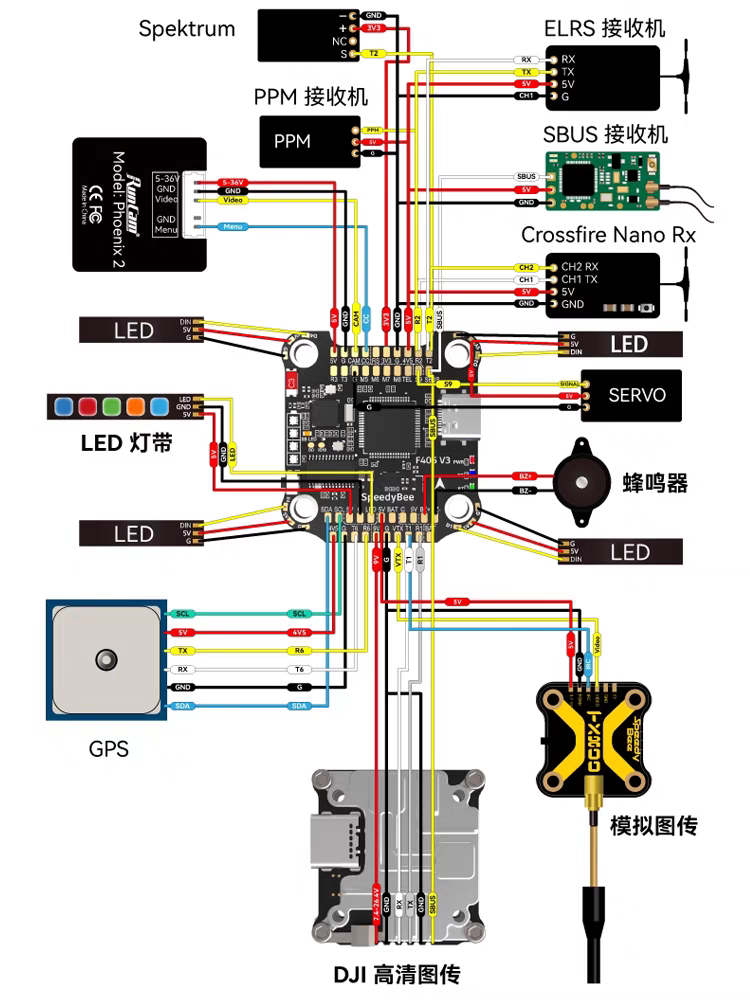
之后就是飞控环节,安装飞控之前,先将图传和接收机以及摄像头焊到飞控上,提前查看商品详情,向飞控商品客服询问飞控焊接指导图,要知道飞控中各个模块对应的焊点位置,模拟图传中有的线可能用不到。再插好飞控和电调之间的排线。
安排好各个模块的位置,用尼龙扎带或者醋酸布胶带固定好各个排线的位置,不要让线碰到陀螺仪上,组装好之后就可以用万用表测试电路有没有问题,方法可以在哔站上查找,这里不在赘述。
组装好没问题之后,检查图传天线是否安装到位,不然的话图传会发热烫手烧坏,然后插上电池通电,并用USB转接线连接电脑,在电脑上打开BETA FLIGHT地面端进行调参Betaflight,具体我也不做过多赘述,毕竟我也是半路出家担心误导读者,但我要提醒的是,调参的时候不要安装桨叶,懂得都懂。还有,调参过程中记得连接遥控器和飞机进行对频,方法也很简单,遥控器打开Bind模式,fpv电池链接并断开3次最后再插上电池,就可以对上了。


讲到这里,我能给大家分享的也就差不多了,因为我的时间和场地有限,同时我是大二在校大学生,学业上还有事情要做,而且我们学校在郑州市中心,起飞试飞练习的话得到空旷的、没有人的地方去,所以我在组装前给自己定下的目标就是能飞就行,其他等到放暑假回家再继续FPV之旅,因此我还有一些配件没有买,比如新的电池和充电器以及飞行眼镜,带上飞行眼镜能够体验到飞行第一视角的刺激画面,如果觉得飞行眼镜太贵,可以先尝试买一个小飞手屏幕平替一下,另外,如果追求更高的画质可以考虑在飞机上加装拇指相机或者运动相机。
FPV试飞
最后,祝大家的FPV之旅一切顺利,安全第一!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









