









写在前面
随便写写:我发现我越来越懒了,之前还能保证一周一篇博文,现在不仅懒得写东西,也懒得写博文,每天在王者荣耀里和傻屌队友怄气,我觉得这样不好,所以这里定个小目标,至少每两周更一次,希望能够坚持到下学期开学。
言归正传:这次介绍维纳滤波器,之前我一直在做FPGA相关的内容,但是这学期导师给我安排任务,说组里有个项目需要在阵列上做波束成形,安排我来做DOA估计和波束成形,在摸索了两个月后,我终于也是慢慢了解了方向,现在就先从滤波器讲起,计划今年九月前能够吧波束成形和doa估计的内容也写出来。以下内容参考第四版的《自适应滤波器原理》第二章,也参考了《现代数字信号处理》一书,有需要的可以在下面链接自取:
书本链接:度盘/1l-p8gsAFnwjcNlvcW0i_SA 提取码:fhln
由于本人实在是不会用csdn的公式编辑,所以我有一些就在word里打好然后在截图,希望大家不要介意
第一部分 自适应横向滤波
下图是线性离散时间滤波器的方框图:
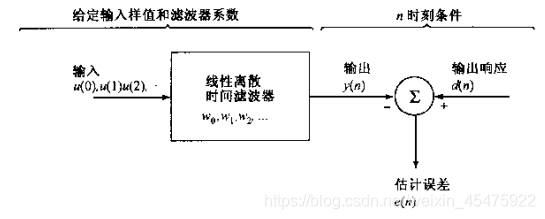
滤波器的输入时间序列为a(0),u(1),并用其冲激响应为w1,w2,来表征该滤波器。面且在某些离散时刻n,滤波器输出为y(n)。这个输出信号用来产生期望响应的估值d(n)。由于滤波器的输入信号和期望响应表示各自随机过程的实现,使得估计通常带有其自身统计特性的误差e(n)。在实际中估计误差是用期望响应d(n)与滤波器输出y(n)之差来表示。其要求的就是在某种统计意义上使估计误差尽可能小。
什么叫自适应?
依稀记得大一的时候,老师上刻上我们自学自适应滤波,其实自适应滤波的数学推导非常简单,但是当时有一个问题一直不理解:
为什么我们都知道了期望响应d(n)了,还需要去得到一个d(n)的估计y(n)?
这个问题困扰了很久,去问老师,结果他也不懂(所以他也不会为什么要我们学呢?当时我就有点生气了!!),所以这门课结课了我也没搞懂这个问题,现在过去这么多年,回头看看这个问题确实是很多人不理解的,下面我就用一句话来解释一下:
其实这里的d(n)是一个训练信号,也可以叫做训练序列,这个使得估计误差尽量小的过程就是训练过程。
这个过程非常像神经网络的训练,你想想,神经网络的训练不就是用已知的图像或者信号输入,然后纠正他在训练集上的输出,从而使得网络在验证集上也有不错的性能吗?
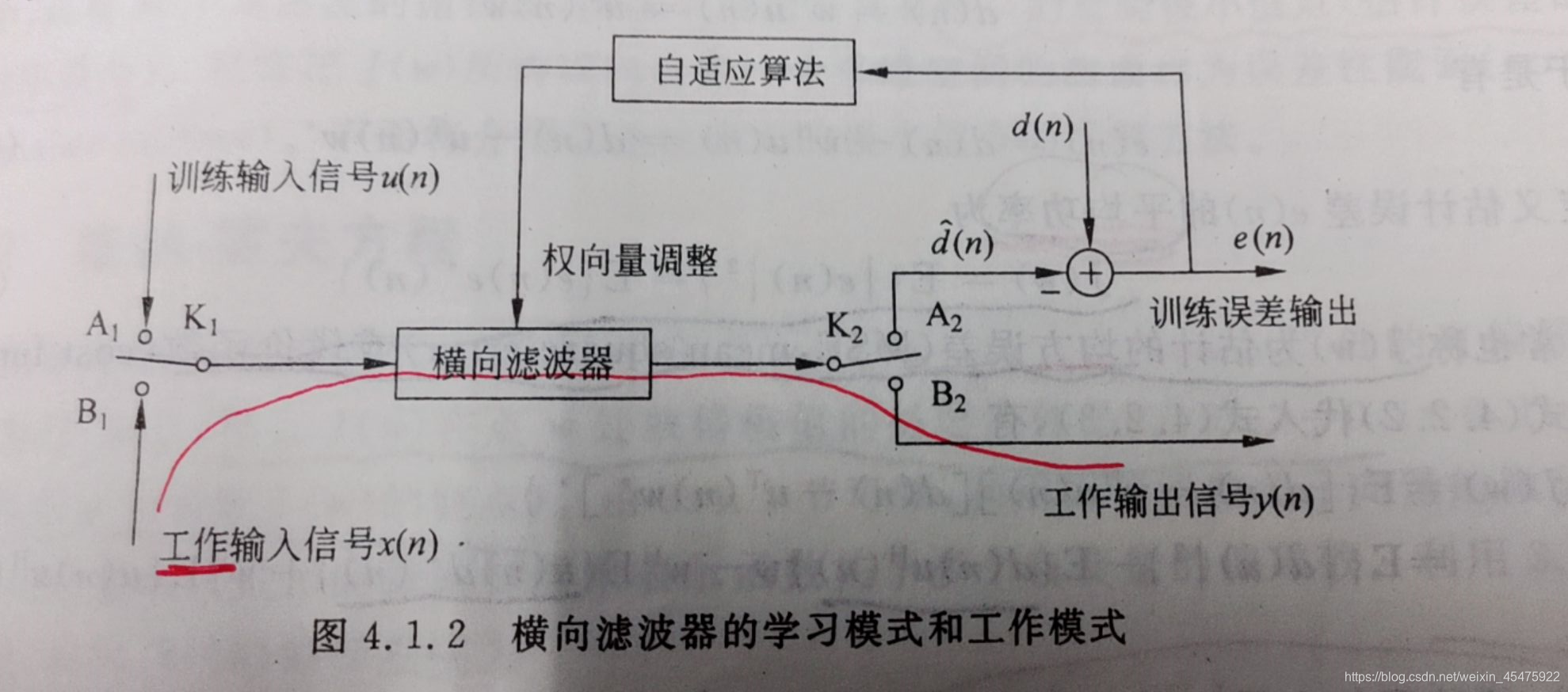
这里的d(n)其实就是训练序列,我们是期望这个滤波器经过训练后可以达到最优的估计,这样在面对工作信号输入时,就能滤除我们不想要的信号,下图就是一个示意。
第二部分 维纳滤波、维纳-霍夫方程和正交原理
解决了自适应里的上面问题后,我们话不多说,提高效率,直接学习维纳滤波。
维纳滤波的思想就是,假定输入和期望响应都是广义平稳随机过程,并且其二阶统计特性已知,那么维纳滤波器就是根据最小均方误差准则MMSE求得的最优滤波器。
所以维纳滤波本质上就是一个最小均方误差问题,我们可以用一个数学的、解析方法求解。
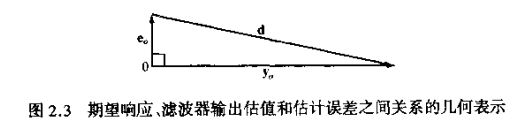
可以得到一个结论,在统计意义下,滤波器取得最优权向量是,估计误差与滤波器所有抽头的输入信号都是相互正交的,这个定理也可以反推,即当正交是,滤波器一定是最优的。这样说可能不太好理解,我们从几何上来讲,滤波器输出的信号y(n)肯定是位于由观测信号u(n)张成的向量空间中,由于噪声的存在,期望信号d(n)并不完全存在于这个子空间中(也可以说,期望信号中没有噪声,因此不能完全放入有噪声的向量空间中),事实上,最优滤波器的输出y(n)就是期望信号d(n)在u(n)张成的向量空间中的投影,而且是正交投影,误差与信号y(n)是正交的。
第三部分 LCMV和MVDR
维纳滤波器的本质是使估计误差(定义为期望响应与滤波器实际输出之差)均方值最小化。在解决这个最优化问题时,没有对它施加任何约束条件。然而,在一些滤波应用中人们希望所设计的滤波器在一定约束条件下使均方误差最小化。例如LCMV滤波器,要求最小化线性滤波器的平均输出功率而同时约束滤波器在一些特定的感兴趣频率上响应保持恒定。
问题:寻找一组最优滤波器系数,使得在如下线性条件下滤波器均方误差最小:
其中g是一个复增益。从波束成形的角度来看,这个约束表示我们希望某一些角度的输入信号有一个增益g。
这里就探讨下MVDR和LCMV算法的区别和联系:
其实这两者没什么区别,只是MVDR中的约束g取的是1这个数,而LCMV中是一个复的增益。
用拉格朗日乘子法就可以得到LCMV的最优解为:
这就是LCMV滤波器的最优权向量。当式中g取1时,就是MVDR滤波器的权向量。
第四部分 广义旁瓣消除器
上面我们讲过,LCMV滤波器是在维纳滤波器的基础上加入了一个线性约束,表示我们想要哪个角度的信号入射,现在我们考虑再多加几个约束,我们希望将某一角度信号完全通过,而其他一些干扰信号的入射方向被尽可能的抑制.
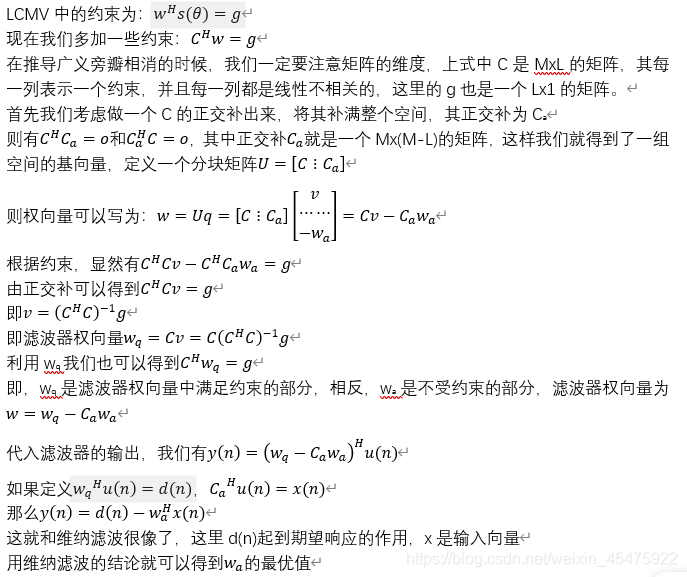
这里,很多人就有疑问了,GSC滤波器为什么会有两个滤波器权向量呢?其实这里可以这样解释:
有一部分权向量,是完全收到约束条件的约束,通过了我们想要通过的信号,抑制了我们不想要的信号,但是仍然有一些干扰存在于滤波后的旁瓣中。因此我们设计一个支路,这个支路完全不满足约束条件,也即是说,抑制了我们想要的信号,通过了我们不想要的信号,这样,在输出端做一个减法,我们就可以将存在于主干路上旁瓣中的干扰消除,所以就叫广义旁瓣消除器。
写在后面:
到这里这次博客就告一段落了,主要是介绍了一些滤波器的数学原理,只能说空域滤波的原理和常规滤波器相同,但是由于数学模型不同,给不同的公式带入了不同的物理意义,如果有什么疑问可以写在博客下,我会一周看一次,也欢迎大佬留言,我还是有很多地方没搞懂的555














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









