






参考源码:
https://github.com/ultralytics/yolov5/tree/v5.0
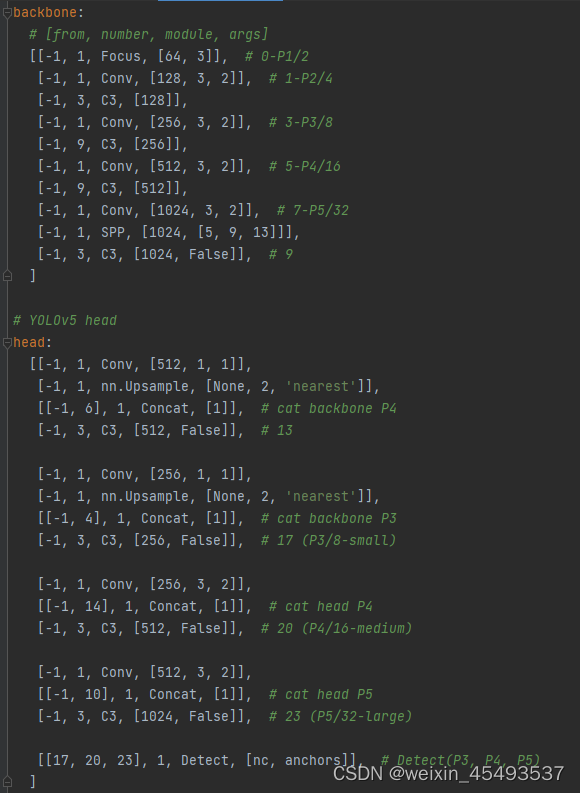
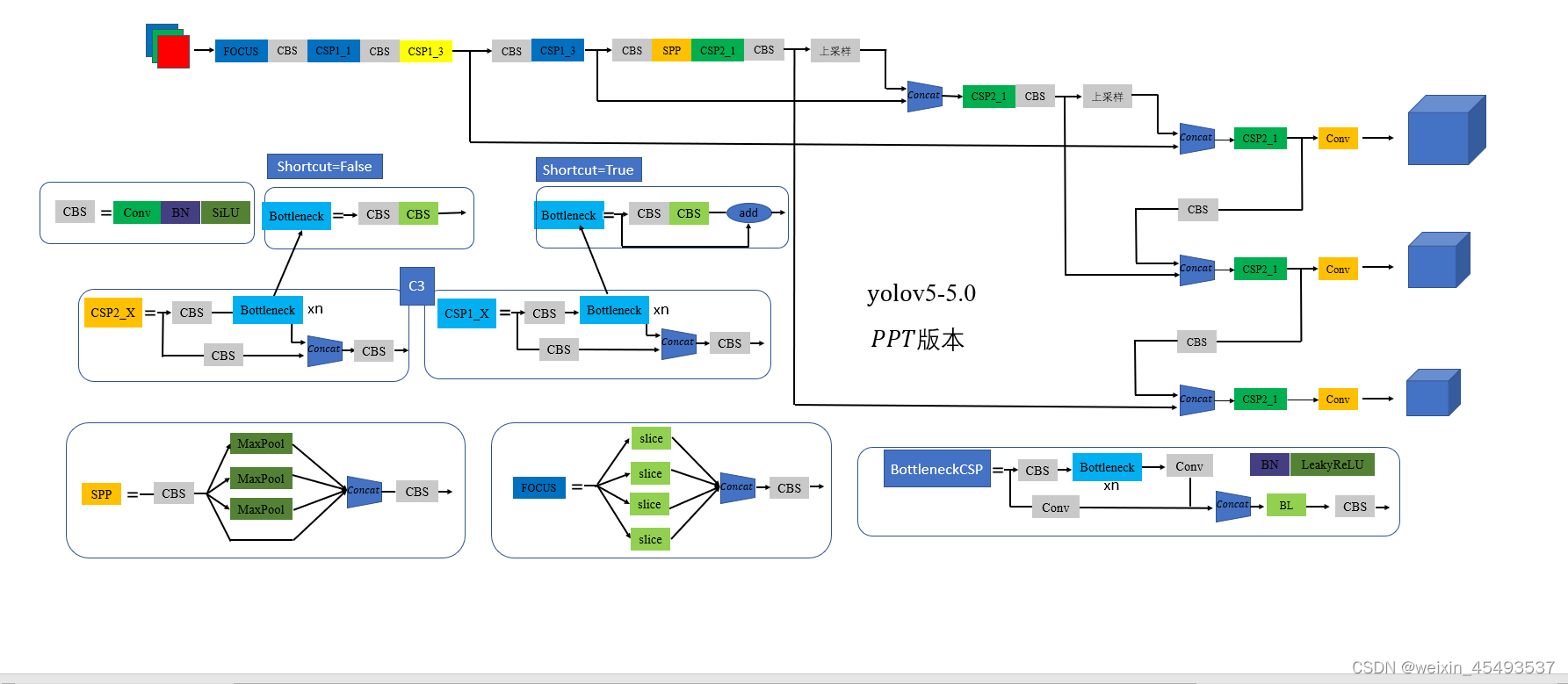
整体网络结构
网络结构通过yaml文件配置,包括yolov5s.yaml,yolov5m.yaml,yolov5l.yaml,yolov5x.yaml(depth_multiple影响网络层数, width_multiple影响channels大小)
| model scale | depth_multiple | width_multiple |
|---|---|---|
| yolov5s.yaml | 0.33 | 0.50 |
| yolov5m.yaml | 0.67 | 0.75 |
| yolov5l.yaml | 1.0 | 1.0 |
| yolov5x.yaml | 1.33 | 1.25 |
在这位大佬提供的PPT画图上修改,确实自己画图很麻烦。https://blog.csdn.net/zhangdaoliang1/article/details/122301031
构建数据集
(1)Mosaic数据增强
def load_mosaic(self, index):
# loads images in a 4-mosaic
labels4, segments4 = [], []
s = self.img_size
#在没有进行Augment之前,图像会变成img_size的两倍,yc, xc 为mosaic中心点
#random.uniform随机生成上述范围的实数(即一半img_size到1.5倍img_size)
yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
#random.choices随机生成另外3张图片的索引,然后把索引合并到indices
for i, index in enumerate(indices):
# Load image 遍历加载图像,如果图像的长边不是img_size大小,会将长边缩放到img_size,短边等比例缩放
img, _, (h, w) = load_image(self, index)
# place img in img4 放置每一张图
if i == 0: # top left
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
#获得大图上的位置
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
#选取原图上的位置
x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
elif i == 1: # top right
x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
elif i == 2: # bottom left
x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
elif i == 3: # bottom right
x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
padw = x1a - x1b
padh = y1a - y1b
# Labels
labels, segments = self.labels[index].copy(), self.segments[index].copy()
if labels.size:
#计算mosaic增强后的标签的位置
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
labels4.append(labels)
segments4.extend(segments)
# Concat/clip labels
labels4 = np.concatenate(labels4, 0)
for x in (labels4[:, 1:], *segments4):
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
# img4, labels4 = replicate(img4, labels4) # replicate
# Augment
#进行mosaic的时候将四张图片整合到一起之后shape为[2*img_size,2*img_size]
#对mosaic整合的图片进行随机旋转、平移、缩放、裁剪,并resize为输入大小img_size
img4, labels4 = random_perspective(img4, labels4, segments4,
degrees=self.hyp['degrees'],
translate=self.hyp['translate'],
scale=self.hyp['scale'],
shear=self.hyp['shear'],
perspective=self.hyp['perspective'],
border=self.mosaic_border) # border to remove
return img4, labels4
构建标签
def build_targets(self, p, targets):
#targets是经过数据增强(mosaic等)后总的bbox,维度[num_box, 6]
#具体为(batch_img_index, class, x , y, w, h)
# Build targets for compute_loss(), input targets(image,class,x,y,w,h)
na, nt = self.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch = [], [], [], []
gain = torch.ones(7, device=targets.device) # normalized to gridspace gain
#每一个锚点可以匹配三个锚框,具体为对应那个锚框的下标
ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
#相当于将targets复制3份,每一份对应一个anchor下标,所以合并后的维度为
[3,num_targets, 7]
targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
g = 0.5 # bias
off = torch.tensor([[0, 0],
[1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
], device=targets.device).float() * g # offsets
for i in range(self.nl):
# 获得对应特征图的3个锚框,维度为[3, 2]
# 3个特征层,选择其中一层对应的anchor(8, 16, 32)
anchors = self.anchors[i]
gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
# Match targets to anchors 将targets调整到特征层尺度大小(cx, cy, w, h)
t = targets * gain
if nt:
# Matches
#j 代表每一个真实框和每一个先验框的宽高的比值的最大值是
#否满足小于anchor_t阈值,过滤掉不满足的
r = t[:, :, 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filter
# Offsets
# 以上每个gt框可以增加3个anchor预测
# 一个是gt box中心点所在方格,另两个是中心点离的最近的两个方格
# top_left gt框中心点的小数部分Cx<g, Cy<g
# bottle_left gt框中心点的小数部分Cx<g, Cy>g
# bottle_right gt框中心点的小数部分Cx>g, Cy>g
# top_right gt框中心点的小数部分Cx>g, Cy<g
gxy = t[:, 2:4] # grid xy
#图像左上角为原点的坐标变换为以图像右下角为原点的坐标。
gxi = gain[[2, 3]] - gxy # inverse
j, k = ((gxy % 1. < g) & (gxy > 1.)).T
l, m = ((gxi % 1. < g) & (gxi > 1.)).T
j = torch.stack((torch.ones_like(j), j, k, l, m))
# 筛选出满足条件的gt_bbox
t = t.repeat((5, 1, 1))[j]
#后面求正样本对应的中心点坐标
offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
else:
t = targets[0]
offsets = 0
# Define
b, c = t[:, :2].long().T # image, class
gxy = t[:, 2:4] # grid xy
gwh = t[:, 4:6] # grid wh
gij = (gxy - offsets).long()
# 获取正样本的中心点位置
gi, gj = gij.T # grid xy indices
# Append
a = t[:, 6].long() # anchor indices
indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box 此处构造的box为(dxc, dyc, w, h)
anch.append(anchors[a]) # anchors
tcls.append(c) # class
return tcls, tbox, indices, anch
NMS非极大值抑制
def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False, labels=()):
"""Runs Non-Maximum Suppression (NMS) on inference results
Returns:
prediction [batch, 25200, 85]
list of detections, on (n,6) tensor per image [xyxy, conf, cls]
"""
# 获得类别数
nc = prediction.shape[2] - 5 # number of classes
# 筛选满足置信度条件的
xc = prediction[..., 4] > conf_thres # candidates
# Settings
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
max_det = 300 # maximum number of detections per image
max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
time_limit = 10.0 # seconds to quit after
redundant = True # require redundant detections
#每个box可以有多个label(多标签)
multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
merge = False # use merge-NMS
t = time.time()
# 新建一个list 包含batchsize个空的output tensor
output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
# 一张图片一张图片的处理
for xi, x in enumerate(prediction): # image index, image inference
# Apply constraints
# x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
# 获取满足置信度条件的框
x = x[xc[xi]] # confidence
# Cat apriori labels if autolabelling
if labels and len(labels[xi]):
l = labels[xi]
v = torch.zeros((len(l), nc + 5), device=x.device)
v[:, :4] = l[:, 1:5] # box
v[:, 4] = 1.0 # conf
v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
x = torch.cat((x, v), 0)
# If none remain process next image
if not x.shape[0]:
continue
# Compute conf
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
# Box (center x, center y, width, height) to (x1, y1, x2, y2)
box = xywh2xyxy(x[:, :4])
# Detections matrix nx6 (xyxy, conf, cls)
if multi_label:
#每个预测框所属的类别置信度大于阈值的
# 假设conf_thres=0.4
# class1 class2 class3
#框1 0.5(True) 0.3(False) 0.6(True)
#框2 0.3(False) 0.5(True) 0.7(True)
# i=0, 0, 1, 1 j=0,2,1,2
# (框1 0.5 class1) (框1 0.6 class3)(框2 0.5 class2) (框2 0.7 class3)
i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
else: # best class only
conf, j = x[:, 5:].max(1, keepdim=True)
x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
# Filter by class
if classes is not None:
x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
# Apply finite constraint
# if not torch.isfinite(x).all():
# x = x[torch.isfinite(x).all(1)]
# Check shape
n = x.shape[0] # number of boxes
if not n: # no boxes
continue
elif n > max_nms: # excess boxes
x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
# Batched NMS
#将两个类别所对应的目标框距离加大,使得各个类别之间做非极大值抑制相互不受影响
# 这里就是将所有类别放在一起抑制,将每一个类别乘上一个max_wh
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
weights = iou * scores[None] # box weights
x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
if redundant:
i = i[iou.sum(1) > 1] # require redundancy
output[xi] = x[i]
if (time.time() - t) > time_limit:
print(f'WARNING: NMS time limit {time_limit}s exceeded')
break # time limit exceeded
return output
计算AP
def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=()):
""" Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
#这里的n是所有test 图像的预测框总和
tp: True positives (nparray, nx1 or nx10).
conf: Objectness value from 0-1 (nparray).
pred_cls: Predicted object classes (nparray).
target_cls: True object classes (nparray).
plot: Plot precision-recall curve at mAP@0.5
save_dir: Plot save directory
# Returns
The average precision as computed in py-faster-rcnn.
"""
# Sort by objectness
# 降序排列
i = np.argsort(-conf)
tp, conf, pred_cls = tp[i], conf[i], pred_cls[i] # 将conf降序排列,同时将pred_cls和tp也按对应次序重排
# Find unique classes
#不同的类别数
unique_classes = np.unique(target_cls)
# 有多少类别
nc = unique_classes.shape[0] # number of classes, number of detections
# Create Precision-Recall curve and compute AP for each class
px, py = np.linspace(0, 1, 1000), [] # for plotting
#ap的shape(classes, 10), p, r(classes, 1000)
ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
#求每一个类别AP
for ci, c in enumerate(unique_classes):
i = pred_cls == c
n_l = (target_cls == c).sum() # number of labels
n_p = i.sum() # number of predictions
if n_p == 0 or n_l == 0:
continue
else:
# Accumulate FPs and TPs
#cumsum函数,通常用于计算一个数组各行的累加值
fpc = (1 - tp[i]).cumsum(0)
tpc = tp[i].cumsum(0)
# Recall
recall = tpc / (n_l + 1e-16) # recall curve
#np.interp()线性插值
#left:当索引超出[xp,fp]时的左侧值(x<xp时在x位置的取值)
#right:当索引超出[xp,fp]时的右侧值(y>fp时在x位置的取值)
r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
# Precision
precision = tpc / (tpc + fpc) # precision curve
p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
# AP from recall-precision curve
for j in range(tp.shape[1]):
#计算0.5-0.95每一个AP值
ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
if plot and j == 0:
py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
# Compute F1 (harmonic mean of precision and recall)
f1 = 2 * p * r / (p + r + 1e-16)
if plot:
plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
i = f1.mean(0).argmax() # max F1 index
return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
看yolov5源码花费不少时间,感觉理解的不够深入,如果有错误还希望大佬们指出,本文的主要目的是记录几个我觉得比较重要的函数,方便自己后续复习!















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









