







CH24:Shorest Path
MindMap:

24.1 定义
最短路径问题:
最优解:最短路径,怎么走
最优解的值:最短路径的长度
最短路径的权重定义为:
最短路径的权重定义为:
{
m
i
n
(
{
w
(
p
)
:if there is a path p from u to v
}
∞
o
t
h
e
r
w
i
s
e
最短路径的权重定义为:\begin{cases}min(\{w(p):\text{if there is a path p from u to v}\} \\ \infty\quad otherwise\end{cases}
最短路径的权重定义为:{min({w(p):if there is a path p from u to v}∞otherwise
一般使用有向图,无向图视作双向。
最短路径一定满足最优子结构(不可用simple约束)
三角不等式:
σ
(
u
,
v
)
≤
σ
(
u
,
x
)
+
σ
(
x
,
v
)
\sigma (u,v)\leq \sigma(u,x)+\sigma(x,v)
σ(u,v)≤σ(u,x)+σ(x,v)

如果图中包含负权环,那么最短路径可能不存在。

24.2 Single-Source shortest path
单源:源点的位置固定,source固定
每对 σ ( u , v ) \sigma(u,v) σ(u,v):每一对结点之间
24.2.1 算法分析
满足最优子结构:一定使用子问题的最优解
- 二分
k是中间的一个结点,找u->k + k->v,穷举所有的k,挑一个最小的
无法计算:可能存在子问题互相包含。
- n推n-1
一样的问题。
计算次序的确定是最短路径的关键。
计算次序是否存在?
{
无顺序:人为的增加一个顺序
有顺序:尝试,分别做子问题的尝试
\begin{cases}无顺序:人为的增加一个顺序\\ 有顺序:尝试,分别做子问题的尝试\end{cases}
{无顺序:人为的增加一个顺序有顺序:尝试,分别做子问题的尝试
24.2.2 dijkstra算法
(1)思路分析
顺序是否真的不存在?考虑下面的图:

特点:无负权,可能存在计算次序
无负权值的图有特点:越往后走路径只能越长,所以对于从A到其余的点,C离A更近,只可能C是别的问题的子问题,不可能别的问题是C的子问题。于是:
- 尝试让C当别的问题的子问题
- 尝试让E当别的问题的子问题
- 尝试让B充当别的问题的子问题
- ……
与前面的DP逻辑的不同:
- DP:父问题找子问题
- 现在:子问题找父问题
即dijkstra算法
(2)程序实现

(3)时间复杂度分析
最坏的情况下,每条边都会用来做松弛,时间复杂度为:
T
(
n
)
=
Θ
(
V
T
E
X
T
R
A
C
T
_
M
I
N
+
E
T
D
E
C
R
E
A
S
E
_
K
E
Y
)
T(n) = \Theta(VT_{EXTRACT\_MIN} +ET_{DECREASE\_KEY})
T(n)=Θ(VTEXTRACT_MIN+ETDECREASE_KEY)
| Q | T E X T R A C T _ M I N T_{EXTRACT\_MIN} TEXTRACT_MIN | T D E C R E A S E _ K E Y T_{DECREASE\_KEY} TDECREASE_KEY | Total |
|---|---|---|---|
| array | O(V) | O(1) | O(v2) |
| Binary Heap | O(lgV) | O(lgV) | O(ElgV) |
| Fibonacci Heap | O(lgV) | O(1) | O(E+VlgV) |
24.2.3 其他边权的情况
24.2.3.1 无权图
使用广度优先搜索,堆数据结构换为队列即可。

时间复杂度 T i m e = O ( V + E ) Time=O(V+E) Time=O(V+E)

24.2.4 Bellman-Ford
如果真的含有负权值边,那么之前的计算次序将不可用,使用Bellman-Ford
其思想在于:若子问题嵌套,那么多使用几次。只要有一条边就拿来尝试更新,但不是只使用一次。
本质:穷举所有的前驱
循环次数:|V|-1
程序实现:
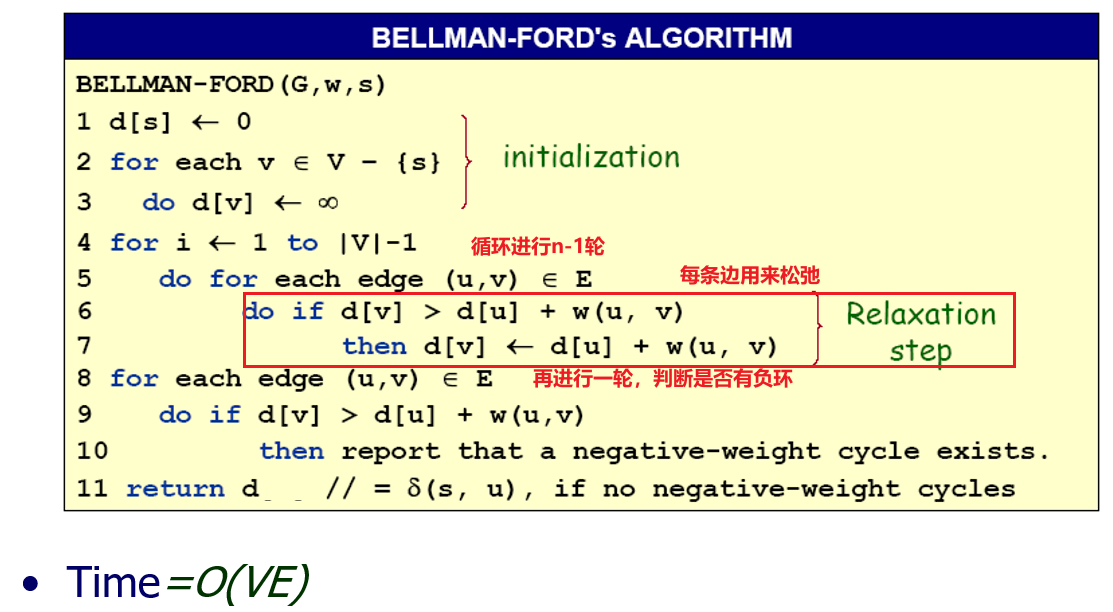
算法实现时,可以为遍历边的次序进行规定。按照次序利用每条边尝试进行松弛。
/*** Bellman-Ford算法 ***/
void Graph::bellman_ford(char s) {
int source = s - 'A'; // 源点的下标
vector<int> distance(vexnum, 999999); // 距离数组的初始化
distance[source] = 0;
vector<char> pre(vexnum, '@');
int iternum = vexnum - 1;
for (int i = 0; i < iternum; i++) { // 松弛次数为顶点数-1
for (int j = 0; j < arcList.size(); j++) { // 邻接表头
for (int k = 0; k < arcList[j].size(); k++) { // 遍历每条边
int target = arcList[j][k].adjvec;
if (distance[target] > distance[j] + arcList[j][k].weight) {
distance[target] = distance[j] + arcList[j][k].weight;
pre[target] = j + 'A';
}
}
}
}
// 再松弛一次,若有负环则报错
for (int i = 0; i < arcList.size(); i++) {
for (int j = 0; j < arcList[i].size(); j++) { // 遍历每条边
int target = arcList[i][j].adjvec;
if(distance[target] > distance[i] + arcList[i][j].weight) {
cout << "Error: There exists a negative weight circle in the graph!";
return;
}
}
}
// 否则没有负权环,打印最短路径长度
printDist(distance, s, pre);
}
思考,为什么进行n-1轮即可。
一个无负环的图,最短路径的边的最多条数为n-1条,否则会出现环。
不绕环的最短路径,边数最多是n-1

24.3 All-pairs shorest path
所有结点对之间的最短路径:
- 无负权:跑n遍dijkstra O ( V 2 l g V + E V l g V ) O(V^2lgV + EVlgV) O(V2lgV+EVlgV)
- 含负权:跑n遍Bellman-Ford
24.3.1 用边数做约束的DP
(1)算法思想
Dynamic Programming 规模变小:边数变少
限制边的数量——n推n-1
定义:
d
i
j
m
:
从
i
→
j
最多过
m
条边的最短路径
d_{ij}^m:从i→j最多过m条边的最短路径
dijm:从i→j最多过m条边的最短路径
那么有:
d
i
j
0
=
{
0
i
f
i
=
j
∞
i
f
i
≠
j
d_{ij}^0 =\begin{cases}0&& if \ i=j\\ \infty&& if\ i\neq j\end{cases}
dij0={0∞if i=jif i=j
松弛为:
求 k —> v的最短路径,过100条边的最短路径,求99条,穷举k
d
i
j
(
m
)
=
min
k
{
d
i
,
k
(
m
−
1
)
+
a
k
,
j
}
d_{ij}^{(m)}=\min_{k}\{d_{i,k}^{(m-1)} + a_{k,j}\}
dij(m)=kmin{di,k(m−1)+ak,j}
最终刻画问题为最多过x条边的最短路径。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rgKyWroB-1659619328463)(https://cdn.jsdelivr.net/gh/Holmes233666/blogImage@main/img/image-20220609165216909.png)]](https://i-blog.csdnimg.cn/blog_migrate/449c71905b13ba06e8e80d217a265230.png)
- 自上而下:推到m=0时就有答案了。
- 自下而上:从m=0开始推,m从小到大计算
d i j 0 : i 到 j 最多 0 条边 → d i j 1 : i 到 j 最多 1 条边 → … … d i j n − 1 : i 到 j 最多 n − 1 条边 d_{ij}^0:i到j最多0条边\rightarrow d_{ij}^1:i到j最多1条边\rightarrow……d_{ij}^{n-1}:i到j最多n-1条边 dij0:i到j最多0条边→dij1:i到j最多1条边→……dijn−1:i到j最多n−1条边
无负环,最短路径最多n-1条边。
假设使用迭代的方式:
for m = 1~n-1 // 每个m计算一个二维数组
for i = 1~n
for j = 1~n
for k = 1~n // 所有前驱
需要使用三维数组,逻辑上是一个二维数组
实际的操作没有标m:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-j1F5P774-1659619328464)(https://cdn.jsdelivr.net/gh/Holmes233666/blogImage@main/img/image-20220609170508574.png)]](https://i-blog.csdnimg.cn/blog_migrate/f63b95d90d725d64dd7e220df4e7a8a1.png)
计算的过程可能被加速:
无负环:
σ
(
i
,
j
)
=
d
i
j
(
n
−
1
)
=
d
i
j
(
n
)
=
d
i
j
(
n
+
1
)
…
…
\sigma(i,j) = d_{ij}^{(n-1)} = d_{ij}^{(n)}=d_{ij}^{(n+1)}……
σ(i,j)=dij(n−1)=dij(n)=dij(n+1)……
故m在工程中可以省略。
负环如何检测? 再计算一轮未必能检测出来
解决:i=j的场景,检查对角线是否有负值,并将m算到n
将该算法应用到单源点,即为Bellman-Ford算法。
(2)改进:Matrix multiplication
每次使用上一次计算的结果和邻接矩阵计算一个新的矩阵。上述思想的伪代码表示如下:
for m = 1 ~ n-1
for i = 1 ~ n
for j = 1 ~ n
for k = 1 ~ n
if d_ij^m >= d_ik^m + a_{k,j}
d_ij^m = d_ik^m + a_{k,j}
需要穷举所有的k,所以使用的是结果矩阵的第i行去加上邻接矩阵的第j列。——类似于矩阵相乘的逻辑
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-hdyC9Jlv-1659619328465)(https://cdn.jsdelivr.net/gh/Holmes233666/blogImage@main/img/image-20220609203755221.png)]](https://i-blog.csdnimg.cn/blog_migrate/4562c0e9042c738ab53d99bea00873e3.png)
C i j = min { a i k + b k j } C_{ij} = \min\{a_{ik}+b_{kj}\} Cij=min{aik+bkj}
24.3.2 用顶点数做约束的DP:Folyed Warshell
(1)算法思路
定义:
c
i
j
k
表示从
i
到
j
最多经过前面
k
个顶点的最短路径
c_{ij}^k表示从i到j最多经过前面k个顶点的最短路径
cijk表示从i到j最多经过前面k个顶点的最短路径
尝试n推n-1:
过前n个结点 尝试 推给过前n-1个结点,类比0-1背包,那么只有两种情况:
c
i
j
(
k
)
{
过第
k
个顶点:
c
i
k
(
k
−
1
)
+
c
k
j
(
k
−
1
)
不过第
k
个顶点:
c
i
j
(
k
−
1
)
c_{ij}^{(k)}\begin{cases}过第k个顶点:c_{ik}^{(k-1) }+ c_{kj}^{(k-1)}\\ 不过第k个顶点:c_{ij}^{(k-1)}\end{cases}
cij(k){过第k个顶点:cik(k−1)+ckj(k−1)不过第k个顶点:cij(k−1)
过0个结点时,
a
i
j
a_{ij}
aij的权值就是答案
c
i
j
(
k
)
=
min
k
{
c
i
j
(
k
−
1
)
,
c
i
k
(
k
−
1
)
+
c
k
j
(
k
−
1
)
}
c_{ij}^{(k)} = \min_k\{c_{ij}^{(k-1)}, c_{ik}^{(k-1)}+c_{kj}^{(k-1)}\}
cij(k)=kmin{cij(k−1),cik(k−1)+ckj(k−1)}

最终过不过第k个结点,比较进行确定。
伪代码:
for k = 1 ~ n
for i = 1 ~ n
for j = 1 ~ n
do if cij > cik + ckj // Relaxation
then cij = cik + ckj
只用一个数组,和上述的用边约束相同,可能会加速计算,但结果不会出错。
Example:
- 一个结点都不过:原距离矩阵

-
过第1个结点

-
过第2个结点

-
过第3个结点

(2)负环检测

24.4 Johnson 算法
要是是正权值,那么可以使用dijkstra算法,如何重赋权?
考虑下面的图,若顶点权值如下,使用 w ( u , v ) + h ( u ) − h ( v ) w(u,v)+h(u)-h(v) w(u,v)+h(u)−h(v)得到一个新的权值,为正值:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FTsZOgAe-1659619328465)(https://cdn.jsdelivr.net/gh/Holmes233666/blogImage@main/img/image-20220610114431299.png)]](https://i-blog.csdnimg.cn/blog_migrate/9f073b4e76ba2d56059293c33d68cff7.png)
-
运行一遍dijkstra,得到的最短路径值做reweighting
-
选择谁当source
- 数学性质上任何点都可以成立,但是要用于修改原来的权值
- source到每个点的距离不能是无穷大
- 实际工程上,使用一个不存在的源点source,到任何点的距离为0
-
使用哪个算法?
Bellman-Ford
算法步骤:
- Bellman-Ford增加点的情况下跑最短路径值,作为顶点值
- 重赋权
- 跑dijkstra
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











