






实现控制差速运动的设备,左摇杆上下(升降-2通道)控制前后运动,右摇杆左右(副翼-1通道)控制转弯,即一个速度大,一个速度小
注:方法有多种,下面仅一种相互混的使用场景
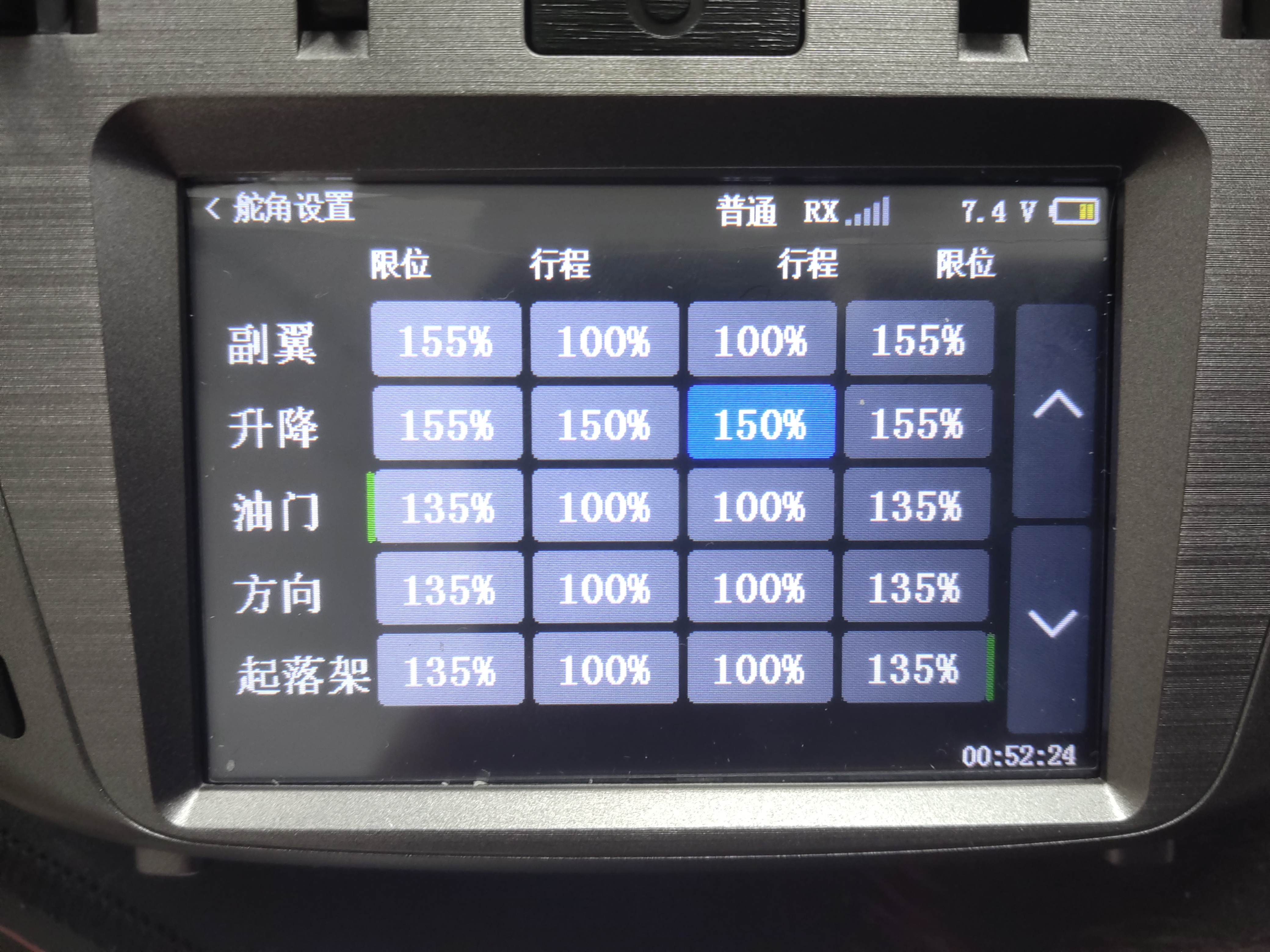
设置行程
副翼形程设置为100,是因为在仅控制右摇杆左右实现原地转向时,不想速度过大
设置混控1控制前后运动
升降2通道混副翼1通道,指在控制左摇杆上下(升降-2通道)时,1通道设备也会跟随运动
比率+ 、+150指,2通道数据变大时,1通道数据也变大,2通道打满则为其行程150,1通道数据则为他的行程100*+150%,即150。比率-,+150同理,2通道与1通道数据方向相同,要大都大,要小都小。实现左摇杆上下控制前后运动。

设置混控2控制转弯运动
副翼1通道混升降2通道,指在控制右摇杆左右(副翼-1通道)时,2通道设备也会跟随运动
比率+ 、-67指,1通道数据变大时,2通道数据变小,1通道打满则为其行程100,2通道数据则为他的行程150*-67%,即-100.5。比率-,-150同理,1通道与2通道数据方向相反,一大一小。实现右摇杆左右控制转弯运动。
现象
具体数值仍需要场景进行微调。



















 788
788

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









