




 本文介绍了PCL中使用的区域生长法,这是一种基于点云数据的分割算法。它通过选取曲率最小的点作为种子点开始生长,通过比较法线角度和曲率值来决定是否将邻居点加入当前区域。
本文介绍了PCL中使用的区域生长法,这是一种基于点云数据的分割算法。它通过选取曲率最小的点作为种子点开始生长,通过比较法线角度和曲率值来决定是否将邻居点加入当前区域。
PCL 区域生长法原理及伪代码
原理
首先,它按曲率值对点进行排序。之所以需要这样做,是因为该区域从具有最小曲率值的点开始增长。这样做的原因是曲率最小的点位于平坦区域(从最平坦的区域增长可以减少段的总数)。
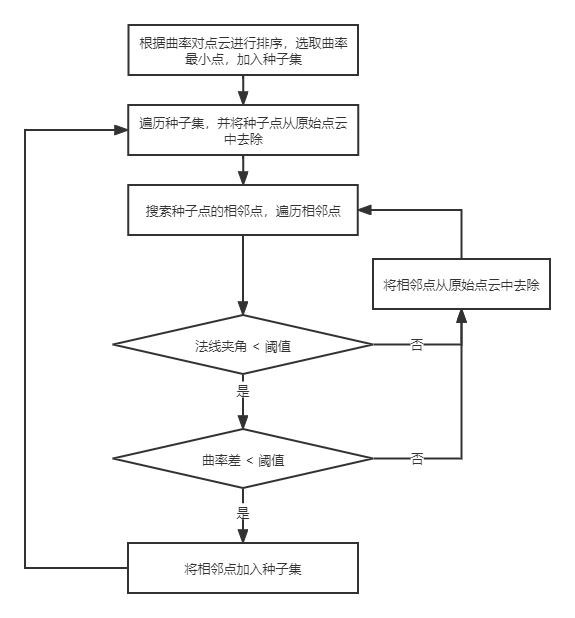
算法选取曲率值最小的点并开始区域的增长,直到点云中没有点为止。这个过程发生如下:
- 选取的点被添加到称为种子的集合中。
- 对于每个种子点,算法找到它的相邻点。
- 测试每个邻居的法线和当前种子点的法线之间的角度。如果角度小于阈值,则将当前点添加到当前区域。
- 之后,测试每个邻居的曲率值。如果曲率小于阈值,则将此点添加到种子中。
- 当前种子从种子中移除。
- 如果种子集变空,这意味着算法已经扩大了区域,并且从头开始重复该过程。
伪代码
PointCloud A; // A 代表点云
R_list; // 存放分类后的点云
while (! A. 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 334
334

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









