






文章目录
一、FreeRTOS
一、了解FreeRTOS
什么是FreeRTOS?
- Free 即免费的,RTOS 全称是 Real Time Operating System,中文就是实时操作系统。注意,RTOS 不是指某一个确定的系统,而是指一类系统。比如 uC/OS,FreeRTOS,RTX,RT-Thread 等这些都是 RTOS 类操作系统。
- 操作系统允许多个任务同时运行,这个叫做多任务。实际上,一个处理器核心在某一时刻只能运行一个任务。操作系统中任务调度器的责任就是决定在某一时刻究竟运行哪个任务。任务调度在各个任务之间的切换非常快,就给人们造成了同一时刻有多个任务同时运行的错觉。
- 某些操作系统给每个任务分配同样的运行时间,时间到了就轮到下一个任务,比如Unix 操作系统。 FreeRTOS 操作系统则是由用户给每个任务分配一个任务优先级,任务调度器就可以根据此优先级来决定下一刻应该运行哪个任务。
- FreeRTOS 是 RTOS 系统的一种,FreeRTOS 十分的小巧,可以在资源有限的微控制器中运行,当然,FreeRTOS 不仅局限于在微控制器中使用。但从文件数量上来看 FreeRTOS 要比uC/OSII 和 uC/OSIII 小的多。
二、移植FreeRTOS
跟着视频学习野火 FreeRTOS视频教学
1提取FreeRTOS最简源码
首先准备固件库,还是采用led小灯的固件库

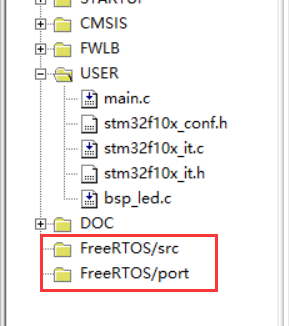
在文件里创建FreeRTOS

在FreeRTOS里创建src和port的文件

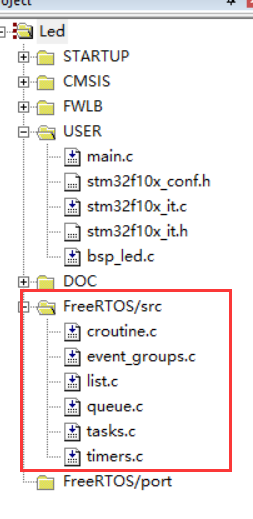
在src里黏贴下载的FreeRTOSv9.0.0\FreeRTOS\Source里的各种.c文件


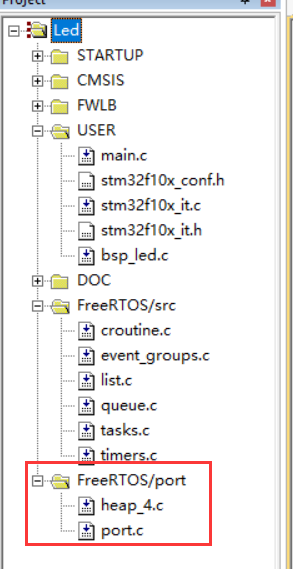
在port里黏贴FreeRTOSv9.0.0\FreeRTOS\Source\portable里的MemMang和RVDS


在FreeRTOS里黏贴FreeRTOSv9.0.0\FreeRTOS\Source里的include文件

因为只是移植最简源码,所以FreeRTOSv9.0.0里的很多文件都不要
2拷贝FreeRTOSConfig.h文件到user文件夹
将FreeRTOSv9.0.0\FreeRTOS\Demo\CORTEX_STM32F103_Keil里的FreeRTOSConfig.h黏贴到FreeRTOS\User里


3添加FreeRTOS源码到工程分组,创建FreeRTOS/src和FreeRTOS/port


本人使用的是stm32指南者,所以选择的是ARM_CM3




4指定FreeRTOS头文件的路径


5修改stm32f10x_it.h
将SVC_Handler(void)和PendSV_Handler(void)两个函数注释掉,因为FreeRTOSConfig.h里也有同样的函数,重复定义了

添加引用头文件#include "FreeRTOS.h"和#include “task.h”

添加中断函数
extern void xPortSysTickHandler(void);
//systick中断服务函数
void SysTick_Handler(void)
{
#if (INCLUDE_xTaskGetSchedulerState == 1 )
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
#endif /* INCLUDE_xTaskGetSchedulerState */
xPortSysTickHandler();
#if (INCLUDE_xTaskGetSchedulerState == 1 )
}
#endif /* INCLUDE_xTaskGetSchedulerState */
}

二、在STM32下完成一个基于FreeRTOS的多任务程序
main.c
#include "FreeRTOS.h"
#include "task.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_usart.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
/* 创建任务句柄 */
static TaskHandle_t AppTaskCreate_Handle = NULL;
/* LED1任务句柄 */
static TaskHandle_t LED1_Task_Handle = NULL;
//串口通讯任务句柄
static TaskHandle_t USART_Task_Handle = NULL;
//AHT20采集一次温湿度数据任务句柄
static TaskHandle_t AHT20_Task_Handle = NULL;;
static void AppTaskCreate(void);/* 用于创建任务 */
/* LED1_Task任务实现 */
static void LED1_Task(void* pvParameters);
//串口通信任务实现
static void USART_Task(void* parameter);
//AHT20采集一次温湿度数据任务实现
static void AHT20_Task(void* parameter);
static void BSP_Init(void);/* 用于初始化板载相关资源 */
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS-动态创建多任务实验!\r\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
//所有的任务创建函数
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED1_Task, /* 任务入口函数 */
(const char* )"LED1_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED1_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED1_Task任务成功!\r\n");
//创建串口通讯任务
xReturn = xTaskCreate((TaskFunction_t )USART_Task,
(const char* )"USART_Task",
(uint16_t )512,
(void* )NULL,
(UBaseType_t )3,
(TaskHandle_t* )&USART_Task_Handle);
if(pdPASS == xReturn)
printf("创建USART_Task任务成功!\r\n");
//AHT20采集一次温湿度数据
xReturn = xTaskCreate((TaskFunction_t )AHT20_Task,
(const char* )"AHT20_Task",
(uint16_t )512,
(void* )NULL,
(UBaseType_t )4,
(TaskHandle_t* )&AHT20_Task_Handle);
if(pdPASS == xReturn)
printf("创建AHT20_Task任务成功!\r\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED小灯
static void LED1_Task(void* parameter)
{
while (1)
{
LED1_ON;
vTaskDelay(500); /* 延时500个tick */
printf("LED1_Task Running,LED1_ON\r\n");
LED1_OFF;
vTaskDelay(500); /* 延时500个tick */
printf("LED1_Task Running,LED1_OFF\r\n");
}
}
//串口通信
static void USART_Task(void* parameter)
{
while (1)
{
vTaskDelay(2000);
printf("helloworld!\r\n");
}
}
//AHT20采集一次温湿度数据
static void AHT20_Task(void* parameter)
{
while (1)
{
vTaskDelay(5000);
printf("采集的温度为10℃\r\n");
}
}
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
USART_Config();
}
串口调试助手演示效果:

实物LED小灯闪烁演示效果:

对串口通讯usart不懂的看我之前的博客:stm32指南者USART串口通信
三、总结
总的来说,按照参考的野火资料很好地完成了作业,但是实际代码部分也不能完全理解,希望能更好















 569
569











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









