






opencv调用openpose姿态检测(二)
论文:Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields 提取码:1u2n
论文理解参考博客:
https://blog.csdn.net/w275840140/article/details/89393626
https://blog.csdn.net/wwwhp/article/details/88782851
轻量级openpose模型完成项目地址(模型7M,精度偏低):
百度云地址:https://pan.baidu.com/s/1tpZPeRSup2SNsgOJR0CWUA
提取码:6f5u
代码:
import cv2
import numpy as np
import argparse
import time
BODY_PARTS = {"Nose": 0, "Neck": 1, "RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7, "RHip": 8, "RKnee": 9,
"RAnkle": 10, "LHip": 11, "LKnee": 12, "LAnkle": 13, "REye": 14,
"LEye": 15, "REar": 16, "LEar": 17, "Background": 18}
POSE_PAIRS = [["Neck", "RShoulder"], ["Neck", "LShoulder"], ["RShoulder", "RElbow"],
["RElbow", "RWrist"], ["LShoulder", "LElbow"], ["LElbow", "LWrist"],
["Neck", "RHip"], ["RHip", "RKnee"], ["RKnee", "RAnkle"], ["Neck", "LHip"],
["LHip", "LKnee"], ["LKnee", "LAnkle"], ["Neck", "Nose"], ["Nose", "REye"],
["REye", "REar"], ["Nose", "LEye"], ["LEye", "LEar"]]
inWidth = 368
inHeight = 368
thr = 0.2
net = cv2.dnn.readNetFromTensorflow("graph_opt.pb")
def video_detect():
fps = 0.0
cap = cv2.VideoCapture(0)
while True:
t1 = time.time()
ret, frame = cap.read()
frameWidth = frame.shape[1]
frameHeight = frame.shape[0]
net.setInput(cv2.dnn.blobFromImage(frame, 1.0, (inWidth, inHeight), (127.5, 127.5, 127.5), swapRB=True, crop=False))
out = net.forward()
out = out[:, :19, :, :] # MobileNet output [1, 57, -1, -1], we only need the first 19 elements
assert (len(BODY_PARTS) == out.shape[1])
points = []
for i in range(len(BODY_PARTS)):
# Slice heatmap of corresponging body's part.
heatMap = out[0, i, :, :]
# Originally, we try to find all the local maximums. To simplify a sample
# we just find a global one. However only a single pose at the same time
# could be detected this way.
_, conf, _, point = cv2.minMaxLoc(heatMap)
x = (frameWidth * point[0]) / out.shape[3]
y = (frameHeight * point[1]) / out.shape[2]
points.append((int(x), int(y)) if conf > thr else None)
for pair in POSE_PAIRS:
partFrom = pair[0]
partTo = pair[1]
assert (partFrom in BODY_PARTS)
assert (partTo in BODY_PARTS)
idFrom = BODY_PARTS[partFrom]
idTo = BODY_PARTS[partTo]
if points[idFrom] and points[idTo]:
#cv2.line()
#第一个参数 img:要划的线所在的图像;
# 第二个参数 pt1:直线起点 第三个参数 pt2:直线终点
# 第四个参数 color:直线的颜色 第五个参数 thickness=1:线条粗细
cv2.line(frame, points[idFrom], points[idTo], (0, 255, 0), 3)
# cv2.ellipse()画椭圆
cv2.ellipse(frame, points[idFrom], (3, 3), 0, 0, 360, (0, 0, 255), cv2.FILLED)
cv2.ellipse(frame, points[idTo], (3, 3), 0, 0, 360, (0, 0, 255), cv2.FILLED)
fps = (fps + (1. / (time.time() - t1))) / 2
# print("fps= %.2f" % (fps))
frame = cv2.putText(frame, "fps= %.2f" % (fps), (0, 40), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow("video", frame)
c = cv2.waitKey(1) & 0xff
if c == 27:
cap.release()
break
def img_detect(image):
t1 = time.time()
img = cv2.imread(image)
imgWidth = img.shape[1]
imgHeight = img.shape[0]
net.setInput(cv2.dnn.blobFromImage(img, 1.0, (inWidth, inHeight), (127.5, 127.5, 127.5), swapRB=True, crop=False))
out = net.forward()
out = out[:, :19, :, :] # MobileNet output [1, 57, -1, -1], we only need the first 19 elements
assert (len(BODY_PARTS) == out.shape[1])
points = []
for i in range(len(BODY_PARTS)):
# Slice heatmap of corresponging body's part.
heatMap = out[0, i, :, :]
_, conf, _, point = cv2.minMaxLoc(heatMap)
x = (imgWidth * point[0]) / out.shape[3]
y = (imgHeight * point[1]) / out.shape[2]
points.append((int(x), int(y)) if conf > thr else None)
for pair in POSE_PAIRS:
partFrom = pair[0]
partTo = pair[1]
assert (partFrom in BODY_PARTS)
assert (partTo in BODY_PARTS)
idFrom = BODY_PARTS[partFrom]
idTo = BODY_PARTS[partTo]
if points[idFrom] and points[idTo]:
cv2.line(img, points[idFrom], points[idTo], (0, 255, 0), 3)
cv2.ellipse(img, points[idFrom], (3, 3), 0, 0, 360, (0, 0, 255), cv2.FILLED)
cv2.ellipse(img, points[idTo], (3, 3), 0, 0, 360, (0, 0, 255), cv2.FILLED)
fps = time.time() - t1
frame = cv2.putText(img, "time= %.2fs" % (fps), (0, 40), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow('img',img)
cv2.waitKey(0)
if __name__ == '__main__':
# 视频检测
video_detect()
# # 图片检测
# img_detect('qin.jpeg')
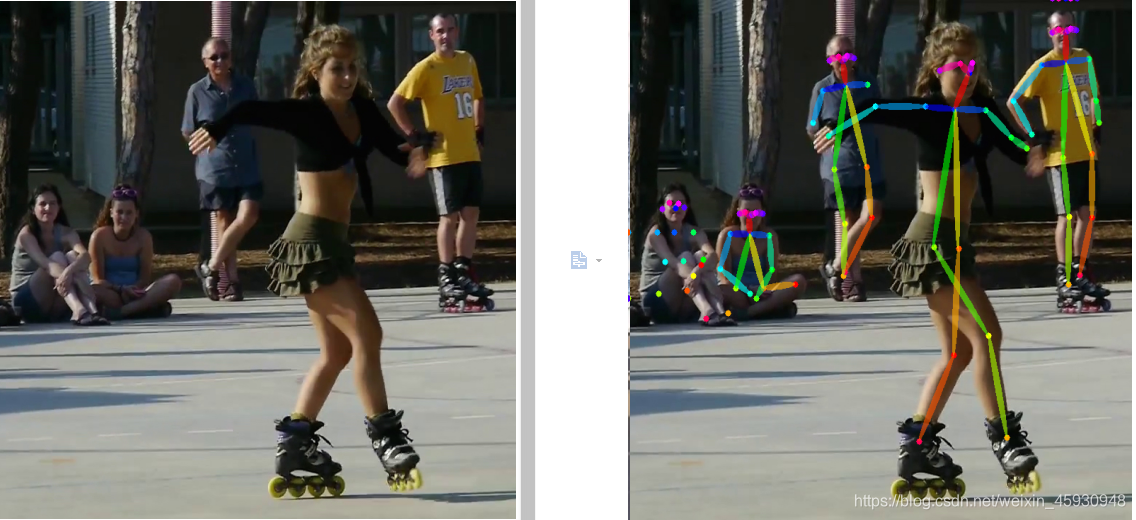
效果图:

基于keras框架openpose姿态检测(190M,精度高)
百度云链接:https://pan.baidu.com/s/1-fqumQWZnz5h4KmW9-Msog
提取码:ety0
复制这段内容后打开百度网盘手机App,操作更方便哦–来自百度网盘超级会员V1的分享
主干模型:VGG19
from keras.models import Model
from keras.layers.merge import Concatenate
from keras.layers import Activation, Input, Lambda
from keras.layers.convolutional import Conv2D
from keras.layers.pooling import MaxPooling2D
from keras.layers.merge import Multiply
from keras.regularizers import l2
from keras.initializers import random_normal,constant
def relu(x):
return Activation('relu')(x)
def conv(x, nf, ks, name, weight_decay):
kernel_reg = l2(weight_decay[0]) if weight_decay else None
bias_reg = l2(weight_decay[1]) if weight_decay else None
x = Conv2D(nf, (ks, ks), padding='same', name=name,
kernel_regularizer=kernel_reg,
bias_regularizer=bias_reg,
kernel_initializer=random_normal(stddev=0.01),
bias_initializer=constant(0.0))(x)
return x
def pooling(x, ks, st, name):
x = MaxPooling2D((ks, ks), strides=(st, st), name=name)(x)
return x
def vgg_block(x, weight_decay):
# Block 1
x = conv(x, 64, 3, "conv1_1", (weight_decay, 0))
x = relu(x)
x = conv(x, 64, 3, "conv1_2", (weight_decay, 0))
x = relu(x)
x = pooling(x, 2, 2, "pool1_1")
# Block 2
x = conv(x, 128, 3, "conv2_1", (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 3, "conv2_2", (weight_decay, 0))
x = relu(x)
x = pooling(x, 2, 2, "pool2_1")
# Block 3
x = conv(x, 256, 3, "conv3_1", (weight_decay, 0))
x = relu(x)
x = conv(x, 256, 3, "conv3_2", (weight_decay, 0))
x = relu(x)
x = conv(x, 256, 3, "conv3_3", (weight_decay, 0))
x = relu(x)
x = conv(x, 256, 3, "conv3_4", (weight_decay, 0))
x = relu(x)
x = pooling(x, 2, 2, "pool3_1")
# Block 4
x = conv(x, 512, 3, "conv4_1", (weight_decay, 0))
x = relu(x)
x = conv(x, 512, 3, "conv4_2", (weight_decay, 0))
x = relu(x)
# Additional non vgg layers
x = conv(x, 256, 3, "conv4_3_CPM", (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 3, "conv4_4_CPM", (weight_decay, 0))
x = relu(x)
return x
def stage1_block(x, num_p, branch, weight_decay):
# Block 1
x = conv(x, 128, 3, "Mconv1_stage1_L%d" % branch, (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 3, "Mconv2_stage1_L%d" % branch, (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 3, "Mconv3_stage1_L%d" % branch, (weight_decay, 0))
x = relu(x)
x = conv(x, 512, 1, "Mconv4_stage1_L%d" % branch, (weight_decay, 0))
x = relu(x)
x = conv(x, num_p, 1, "Mconv5_stage1_L%d" % branch, (weight_decay, 0))
return x
def stageT_block(x, num_p, stage, branch, weight_decay):
# Block 1
x = conv(x, 128, 7, "Mconv1_stage%d_L%d" % (stage, branch), (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 7, "Mconv2_stage%d_L%d" % (stage, branch), (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 7, "Mconv3_stage%d_L%d" % (stage, branch), (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 7, "Mconv4_stage%d_L%d" % (stage, branch), (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 7, "Mconv5_stage%d_L%d" % (stage, branch), (weight_decay, 0))
x = relu(x)
x = conv(x, 128, 1, "Mconv6_stage%d_L%d" % (stage, branch), (weight_decay, 0))
x = relu(x)
x = conv(x, num_p, 1, "Mconv7_stage%d_L%d" % (stage, branch), (weight_decay, 0))
return x
def apply_mask(x, mask1, mask2, num_p, stage, branch):
w_name = "weight_stage%d_L%d" % (stage, branch)
if num_p == 38:
w = Multiply(name=w_name)([x, mask1]) # vec_weight
else:
w = Multiply(name=w_name)([x, mask2]) # vec_heat
return w
def get_training_model(weight_decay):
stages = 6
np_branch1 = 38
np_branch2 = 19
img_input_shape = (None, None, 3)
vec_input_shape = (None, None, 38)
heat_input_shape = (None, None, 19)
inputs = []
outputs = []
img_input = Input(shape=img_input_shape)
vec_weight_input = Input(shape=vec_input_shape)
heat_weight_input = Input(shape=heat_input_shape)
inputs.append(img_input)
inputs.append(vec_weight_input)
inputs.append(heat_weight_input)
img_normalized = Lambda(lambda x: x / 256 - 0.5)(img_input) # [-0.5, 0.5]
# VGG
stage0_out = vgg_block(img_normalized, weight_decay)
# stage 1 - branch 1 (PAF)
stage1_branch1_out = stage1_block(stage0_out, np_branch1, 1, weight_decay)
w1 = apply_mask(stage1_branch1_out, vec_weight_input, heat_weight_input, np_branch1, 1, 1)
# stage 1 - branch 2 (confidence maps)
stage1_branch2_out = stage1_block(stage0_out, np_branch2, 2, weight_decay)
w2 = apply_mask(stage1_branch2_out, vec_weight_input, heat_weight_input, np_branch2, 1, 2)
x = Concatenate()([stage1_branch1_out, stage1_branch2_out, stage0_out])
outputs.append(w1)
outputs.append(w2)
# stage sn >= 2
for sn in range(2, stages + 1):
# stage SN - branch 1 (PAF)
stageT_branch1_out = stageT_block(x, np_branch1, sn, 1, weight_decay)
w1 = apply_mask(stageT_branch1_out, vec_weight_input, heat_weight_input, np_branch1, sn, 1)
# stage SN - branch 2 (confidence maps)
stageT_branch2_out = stageT_block(x, np_branch2, sn, 2, weight_decay)
w2 = apply_mask(stageT_branch2_out, vec_weight_input, heat_weight_input, np_branch2, sn, 2)
outputs.append(w1)
outputs.append(w2)
if (sn < stages):
x = Concatenate()([stageT_branch1_out, stageT_branch2_out, stage0_out])
model = Model(inputs=inputs, outputs=outputs)
return model
def get_testing_model():
stages = 6
np_branch1 = 38
np_branch2 = 19
img_input_shape = (None, None, 3)
img_input = Input(shape=img_input_shape)
img_normalized = Lambda(lambda x: x / 256 - 0.5)(img_input) # [-0.5, 0.5]
# VGG
stage0_out = vgg_block(img_normalized, None)
# stage 1 - branch 1 (PAF)
stage1_branch1_out = stage1_block(stage0_out, np_branch1, 1, None)
# stage 1 - branch 2 (confidence maps)
stage1_branch2_out = stage1_block(stage0_out, np_branch2, 2, None)
x = Concatenate()([stage1_branch1_out, stage1_branch2_out, stage0_out])
# stage t >= 2
stageT_branch1_out = None
stageT_branch2_out = None
for sn in range(2, stages + 1):
stageT_branch1_out = stageT_block(x, np_branch1, sn, 1, None)
stageT_branch2_out = stageT_block(x, np_branch2, sn, 2, None)
if (sn < stages):
x = Concatenate()([stageT_branch1_out, stageT_branch2_out, stage0_out])
model = Model(inputs=[img_input], outputs=[stageT_branch1_out, stageT_branch2_out])
return model
检测结果:














 6464
6464











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









