







PPT 截取必要信息。 课程网站做习题。总体 MOOC 过一遍
- 1、视频 + 学堂在线 习题
- 2、过 电子书,补充 【下载:本章 PDF 电子书 GitHub 界面链接】 [又看了一遍视频]
- 3、总体 MOOC 过一遍 习题
学堂在线 课程页面链接
中国大学MOOC 课程页面链接
B 站 视频链接
PPT和书籍下载网址: 【GitHub 链接】
强化学习的最终目标: 寻求最优策略
贝尔曼最优公式, 可以求解 最优状态值 和 最优策略。
————————
P1 如何 改进策略 ——> 选择 动作值 最大的动作
最优状态值、最优策略
the Bellman optimality equation (BOE) 贝尔曼最优公式
计算 状态值 v π ( s ) v_\pi(s) vπ(s), 然后计算 动作值 q π ( s ) q_\pi(s) qπ(s)
选择 动作值 最大的动作可以得到 比较好的策略 。
选择 动作值 大的策略, 不断迭代, 一定可以得到 最优策略。
——————
P2 最优策略 定义
用 状态值 来评估一个策略的好坏:
若 对于 所有的 s ∈ S s\in \mathcal S s∈S, 均满足 v π 1 ( s ) ≥ v π 2 ( s ) v_{\pi_1}(s)\geq v_{\pi_2}(s) vπ1(s)≥vπ2(s)。 则认为 策略 1 比 策略 2 好。
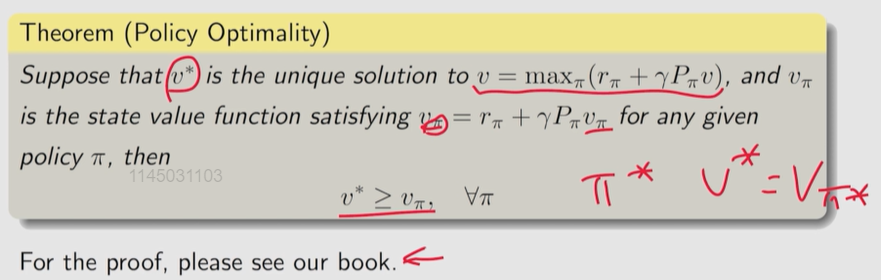
最优策略 π ∗ \pi^* π∗: 对 所有 s s s 和 所有策略 π \pi π, 均有 v π ∗ ( s ) ≥ v π ( s ) v_{\pi^*}(s) \geq v_\pi(s) vπ∗(s)≥vπ(s)。
与所有其他策略相比,最优策略在每个状态下都具有最大的状态值。
最优策略是否一定存在?
最优策略是唯一的吗?
最优策略是随机的还是确定的?
如何获得最优策略?
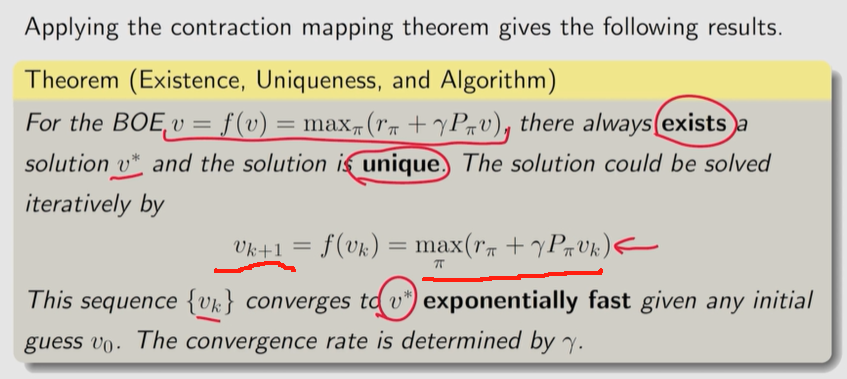
在后续内容中,需要 求解 形如 f ( v ) = v f(v) = v f(v)=v 的方程,这正是 压缩映射定理【不动点定理】的相关内容。可证得 最优策略 对应的最优状态值 存在且唯一。
3.3 贝尔曼最优公式
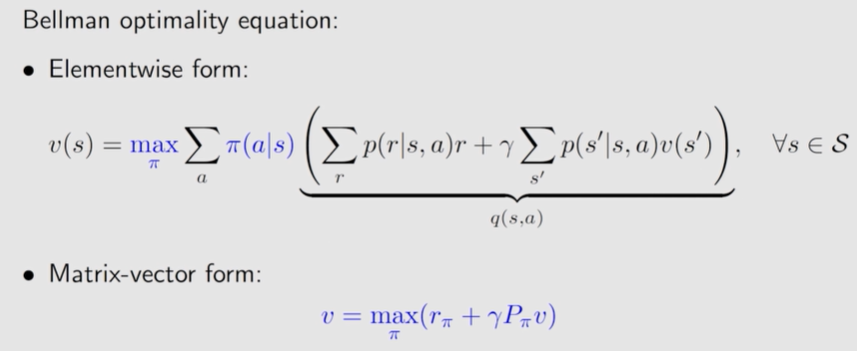
v ( s ) = max π ∑ a π ( a ∣ s ) ( ∑ r p ( r ∣ s , a ) r + γ ∑ s ′ p ( s ′ ∣ s , a ) v ( s ′ ) ) , ∀ s ∈ S = max π ∑ a π ( a ∣ s ) q ( s , a ) , s ∈ S \begin{aligned}v(s)&= \textcolor{blue}{\max\limits_\pi}\sum\limits_a\pi(a|s)\Big(\sum\limits_rp(r|s,a)r+\gamma \sum\limits_{s^\prime}p(s^\prime|s, a)v(s^\prime)\Big), ~~~~\forall s\in\mathcal S\\ &=\max\limits_\pi\sum\limits_a\pi(a|s)q(s, a), ~~~s\in\mathcal S\end{aligned} v(s)=πmaxa∑π(a∣s)(r∑p(r∣s,a)r+γs′∑p(s′∣s,a)v(s′)), ∀s∈S=πmaxa∑π(a∣s)q(s,a), s∈S
通过求解这个方程, 可以获得 最优策略 和 最优状态值。
- 已知: p ( r ∣ s , a ) , p ( s ′ ∣ s , a ) p(r|s,a),~~~p(s^\prime|s,a) p(r∣s,a), p(s′∣s,a)
- 未知: v ( s ) , v ( s ′ ) v(s),~~~v(s^\prime) v(s), v(s′)
$\forall$
∀
~~\forall
∀
贝尔曼最优方程的 矩阵-向量形式:
v = max π ( r π + γ P π v ) \bm v=\max \limits_\pi(\bm r_\pi+\gamma\bm P_\pi\bm v) v=πmax(rπ+γPπv)
- [ r π ] s ≜ ∑ a π ( a ∣ s ) ∑ r p ( r ∣ s , a ) r [r_\pi]_s\triangleq\sum\limits_a\pi(a|s)\sum\limits_rp(r|s, a)r [rπ]s≜a∑π(a∣s)r∑p(r∣s,a)r
- [ P π ] s , s ′ = p ( s ′ ∣ s ) ≜ ∑ a π ( a ∣ s ) ∑ s ′ p ( s ′ ∣ s , a ) [P_\pi]_{s,s^\prime}=p(s^{\prime}|s)\triangleq\sum\limits_a\pi(a|s)\sum\limits_{s^\prime}p(s^{\prime}|s, a) [Pπ]s,s′=p(s′∣s)≜a∑π(a∣s)s′∑p(s′∣s,a)
$\triangleq$
≜
~~\triangleq
≜
如何求解这个方程?
存在性:这个方程有解吗?
唯一性:这个方程的解是否唯一?
最优性:这个解与最优策略有什么关系?
一个式子, 两个未知量。如何求解 右侧的最大化?
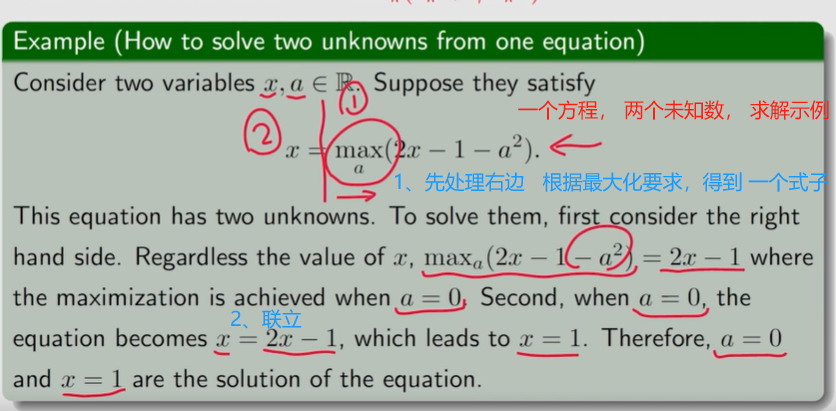

类似地, 求解 贝尔曼最优方程
v ( s ) = max π ∑ a π ( a ∣ s ) q ( s , a ) v(s)=\max\limits_\pi\sum\limits_a\pi(a|s)q(s, a) v(s)=πmaxa∑π(a∣s)q(s,a)
受上述例子启发, 由于 ∑ a π ( a ∣ s ) = 1 \sum\limits_a\pi(a|s)=1 a∑π(a∣s)=1
∑ a π ( a ∣ s ) q ( s , a ) ≤ ∑ a π ( a ∣ s ) max a q ( s , a ) = max a q ( s , a ) \sum\limits_a\pi(a|s)q(s, a)\leq\sum\limits_a\pi(a|s)\max\limits_aq(s,a)=\max\limits_aq(s, a) a∑π(a∣s)q(s,a)≤a∑π(a∣s)amaxq(s,a)=amaxq(s,a)
∑ a π ( a ∣ s ) q ( s , a ) \sum\limits_a\pi(a|s)q(s, a) a∑π(a∣s)q(s,a) 是类似于 上述例子中的求和式,根据经验,让取得最大的 q ( s , a ) q(s, a) q(s,a) 【相当于 q 3 q_3 q3】相应的概率 π ( a ∣ s ) \pi(a|s) π(a∣s) 【相当于 c 3 c_3 c3】为 1, 其它情况相应的 π ( a ∣ s ) \pi(a|s) π(a∣s) 为 0, 此时能获得最大值
即 令 π ( a ∣ s ) = { 1 , a = a ∗ 0 , a ≠ a ∗ \pi(a|s)=\left\{ \begin{aligned} &1, &a=a^*\\ &0, &a\neq a^*\\ \end{aligned} \right. π(a∣s)={1,0,a=a∗a=a∗
- a ∗ a^* a∗:最大的 q q q 值对应的 action。 a ∗ = arg max a q ( s , a ) a^*=\arg \max\limits_aq(s, a) a∗=argamaxq(s,a)
最优策略 π ( s ) π(s) π(s) 是选择具有 最大 q ( s , a ) q(s, a) q(s,a) 的动作的策略。
——————
3.3.3 压缩映射定理 : 求解 v = f(v)
P3
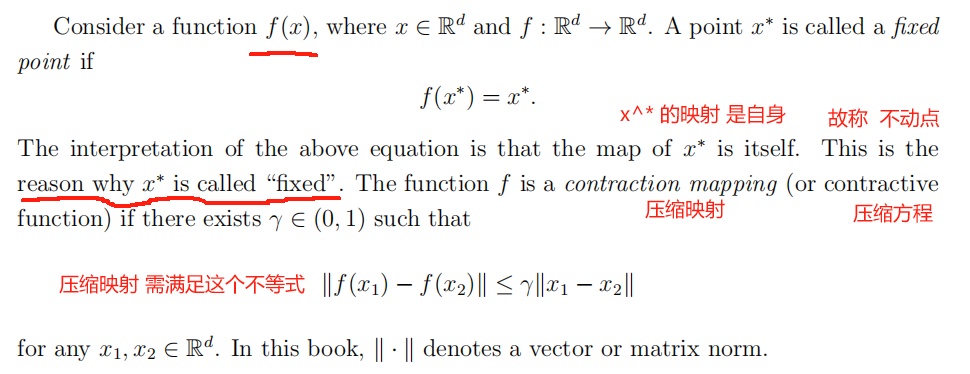
压缩映射定理 是分析一般非线性方程的有力工具。它也被称为不动点定理。
回到正题:
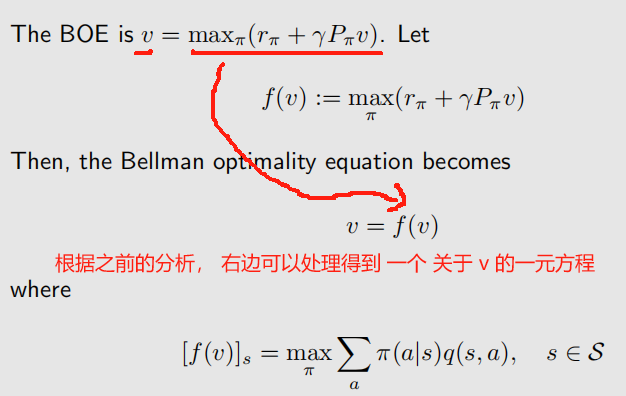
令 f ( v ) = max π ( r π + γ P π v ) f(\bm v)=\max\limits_\pi(\bm r_\pi+\gamma\bm P_\pi\bm v) f(v)=πmax(rπ+γPπv)
v = f ( v ) ~~\bm v=f(\bm v) v=f(v)

映射后的距离 比 之前 小。
示例:
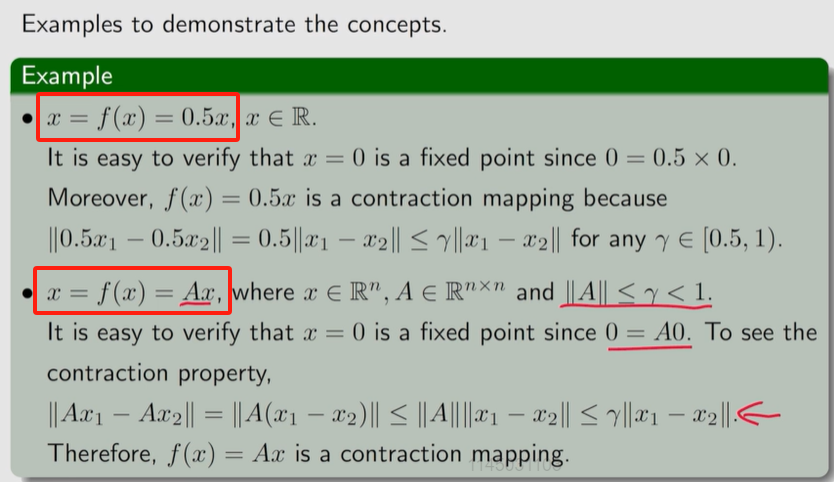

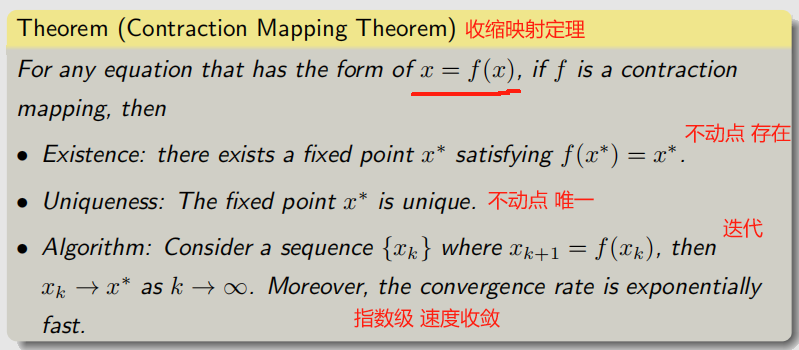
该定理描述了 不动点 和 压缩映射 之间的关系
只要是 具有 形如 x = f ( x ) x = f(x) x=f(x) 的压缩映射, 必存在 一个 不动点 满足 f ( x ∗ ) = x ∗ f(x^*)=x^* f(x∗)=x∗ ,且这个不动点是 唯一的。可通过 迭代式 x k + 1 = f ( x k ) x_{k+1}=f(x_k) xk+1=f(xk) 求解。
压缩映射定理不仅可以判断非线性方程的解是否存在,而且还提供了求解该方程的数值算法。
P53-
- 证明 1: 压缩映射定理 P53- [见 后文补充]
如何利用 压缩映射定理 提出的 迭代算法 计算一些方程的不动点
例子:

3.3.4 贝尔曼最优公式的右侧 具有 压缩性
为了 应用 上述的 压缩映射定理 求解 贝尔曼最优方程 , 需要 证明 f ( v ) f(v) f(v) 具有 收缩 的性质。

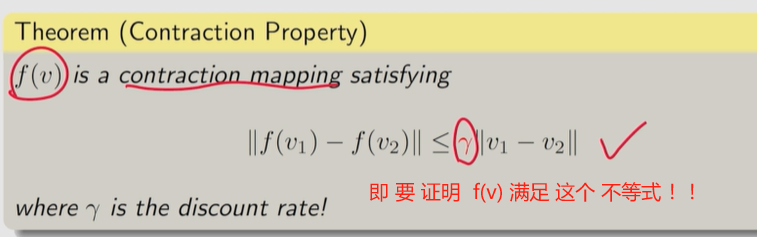
- 证明 2: 贝尔曼最优方程 的右侧 是 压缩映射的 P55- [ 见 后文补充]
3.4 贝尔曼最优方程 的解
上述 内容 证明了 贝尔曼最优方程 可以 运用 压缩映射定理 进行分析,可通过 迭代式 求解。
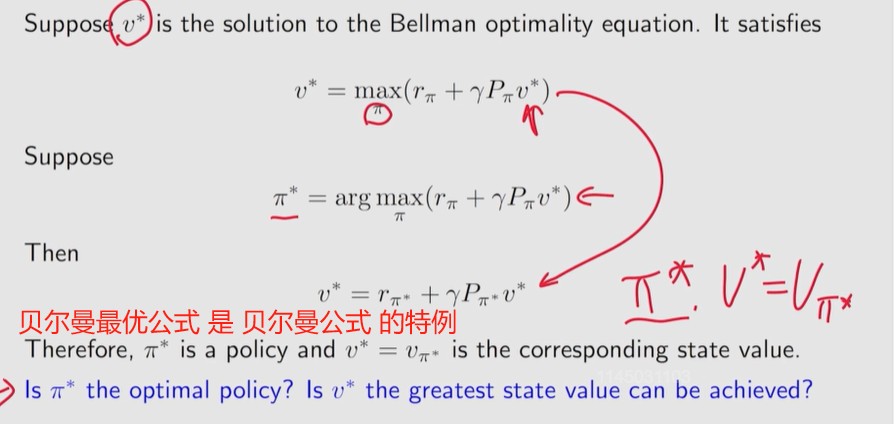
最优策略 π ∗ = arg max π ( r π + γ P π v ∗ ) \pi^*=\arg\max\limits_\pi(r_\pi+\gamma P_\pi v^*) π∗=argπmax(rπ+γPπv∗)
v ∗ v^* v∗ 是不动点, 因为 v ∗ = f ( v ∗ ) v^*=f(v^*) v∗=f(v∗)。
贝尔曼最优公式 是 策略为最佳策略时的贝尔曼公式。
这个策略 是不是 最优的 ?
状态值
v
π
∗
v_{\pi^*}
vπ∗ 是不是 最大的 ?
贝尔曼最优公式的不动点解 【最终的收敛值】 v ∗ v^* v∗ 就是 最大的状态值,此时的 π ∗ \pi^* π∗ 为最优策略。 [因为 对应的状态值最大]
BOE: 描述了 最优状态值 和 最优策略。
- 证明 3: 贝尔曼最优方程的解对应 最大状态值 和 最优策略 P58- [见 后文补充]
最优策略 π ∗ \pi^* π∗ 长 啥样呢?
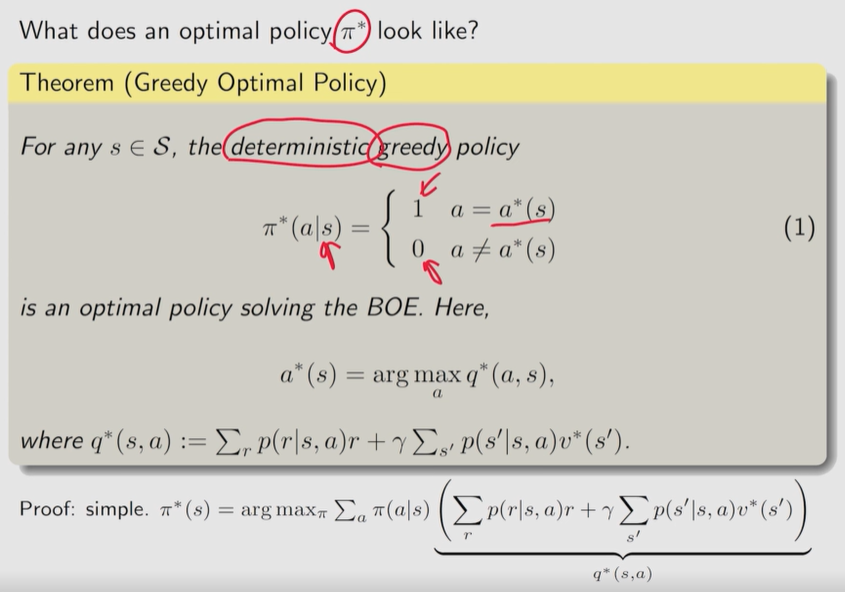
总存在一个确定性的最优贪婪策略——选
q
(
s
,
a
)
q(s, a)
q(s,a) 最大的 动作。
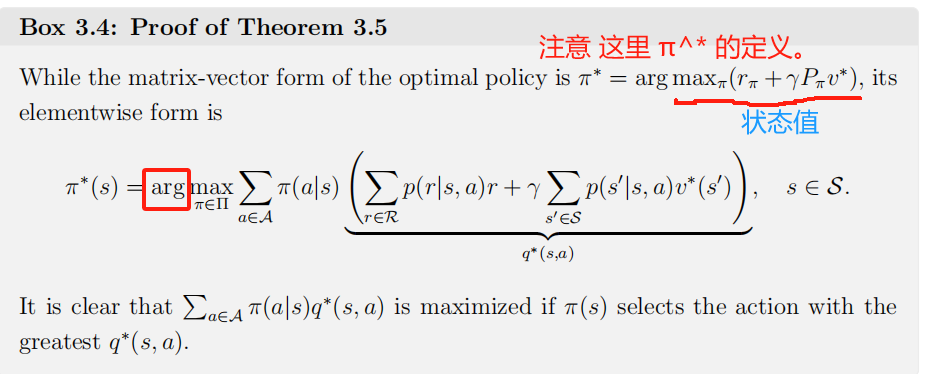
同样是类似于之前的求和式,令 q ∗ ( s , a ) q^*(s, a) q∗(s,a) 最大的对应 π ( a ∣ s ) \pi (a|s) π(a∣s) 为 1, 其它 为 0 。可获得 最大值。
正是证明了之前提到的 最优策略 π ( s ) π(s) π(s) 是选择具有 最大 q ( s , a ) q(s, a) q(s,a) 的动作的策略。
v ∗ v^* v∗ 的值是唯一的,但 v ∗ v^* v∗ 对应的最优策略可能不是唯一的。
————————
3.5 哪些因素影响最佳策略
P4 3.5
什么因素 决定最优策略 ?
最优策略的影响因素: 回报 r r r,折扣率 γ \gamma γ
γ
\gamma~
γ 小, 短视;即时奖励
~~~~
[选择即时奖励最大的行动,而不是总回报最大的行动。]
γ
\gamma~
γ 大,目光长远; 延迟奖励
靠近目标的状态值较大,而远离目标的状态值较低。
- 如果一个状态必须沿着更长的轨迹到达目标,那么由于折扣率的存在,它的状态值就会变小。
r r~ r 只关心 动作间的 奖励相对值。
$r~$ 友好的 波浪线强制空格
- 证明 4: 对所有 reward 统一进行 仿射变换, 最优策略 保持不变 P62- [见 后文补充]
当奖励都为 正 或 都为负的时候 可以 依据 以上定理 进行变换。最优策略 只和 奖励间的 相对值 有关
例子:
绕路
贝尔曼最优方程的 解对应 最佳状态值 和 最优策略。
小结:
3.7 节
什么是最优策略?
如果一个策略对应的状态值大于或等于任何其他策略,则该策略是最优的。
应该注意的是,这个特定的最优性定义仅对表格强化学习算法有效。当值或策略由函数近似时,必须使用不同的度量来定义最优策略。
最优政策是随机的还是确定的 ?
最优策略可以是确定性的,也可以是随机的。一个很好的事实是,总是存在确定性贪婪最优策略。
如果我们希望最优策略在到达目标之前避免无意义的弯路,我们是否应该在每一步都增加一个负奖励,以使 agent 尽快到达目标?
首先,在每一步中引入一个额外的负奖励是奖励的仿射变换,它不会改变最优策略。其次,折扣率可以自动鼓励 agent 尽快达到目标。这是因为无意义的弯路会增加轨迹长度,减少 折扣回报 discounted return 。
-——————
习题 笔记:
最优策略不一定唯一。
补充
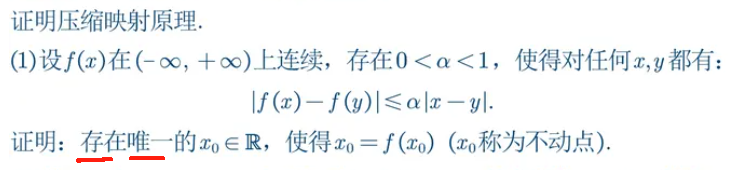
证明 1: 压缩映射定理

压缩映射定理 不仅可以判断非线性方程的解是否存在,而且还提供了求解该方程的数值算法。 x k + 1 = f ( x k ) x_{k+1}=f(x_k) xk+1=f(xk)。不断迭代即可获得 解。
P8 Box 3.1
补充:
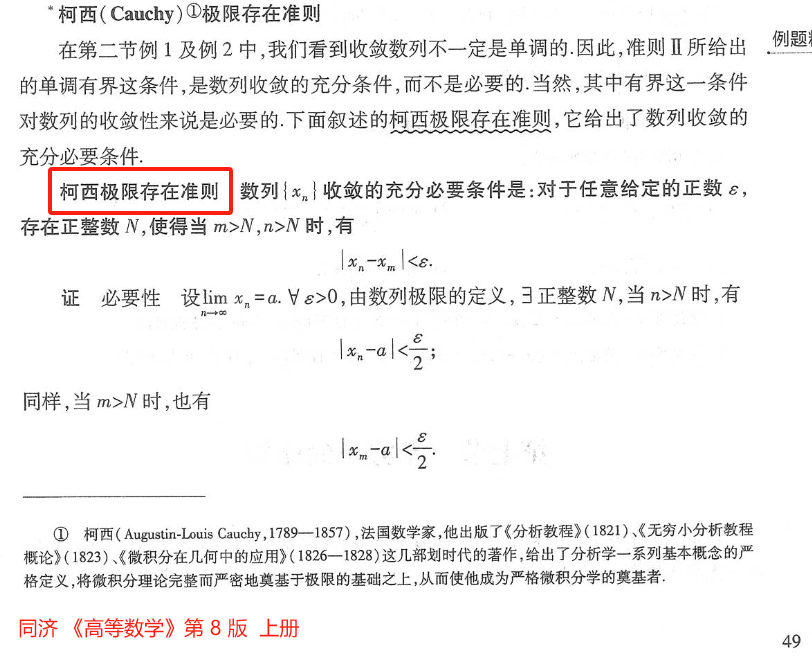
根据 柯西极限存在准则,证明 不动点 存在。
1、证明 当 { x k } k = 1 ∞ \{x_k\}_{k=1}^\infty {xk}k=1∞ 时, x k = f ( x k − 1 ) x_k=f(x_{k-1}) xk=f(xk−1) 收敛。
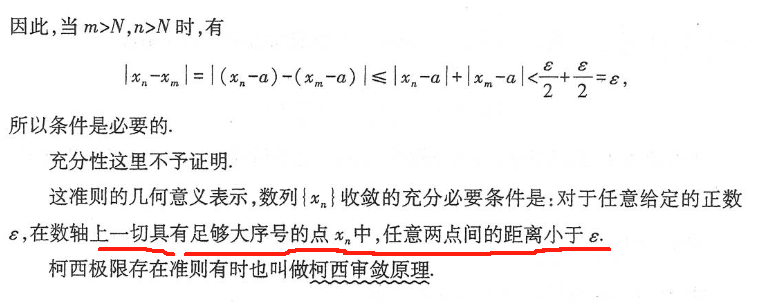
这个证明依赖于柯西序列。一个序列 x 1 , x 2 , ⋯ ∈ R x_1, x_2, \cdots \in \mathbb R x1,x2,⋯∈R, 如果对于任何小的 ε > 0 \varepsilon > 0 ε>0,存在 N N N, 对于所有 m , n > N m, n > N m,n>N, 使得 ∣ ∣ x m − x n ∣ ∣ < ε ||x_m - x_n|| < \varepsilon ∣∣xm−xn∣∣<ε。
直观的解释是存在一个有限整数 N N N, 使得 N N N 之后的所有元素彼此足够接近。
柯西序列之所以重要,是因为它保证了柯西序列收敛于某个有限值。
它的收敛性将用于证明 压缩映射定理。
注意,对于所有的
m
,
n
>
N
m,n > N
m,n>N,我们必须有
∣
∣
x
m
−
x
n
∣
∣
<
ε
||x_m - x_n|| < ε
∣∣xm−xn∣∣<ε。
如果我们仅仅有
x
n
+
1
−
x
n
→
0
x_{n+1} - x_n→0
xn+1−xn→0,就不足以断言这个序列是柯西序列。
例如,对于
x
n
=
n
x_n= \sqrt n
xn=n,
x
n
+
1
−
x
n
→
0
x_{n+1} - x_n→0
xn+1−xn→0 成立,但显然,
x
n
=
n
x_n= \sqrt n
xn=n 是发散的。
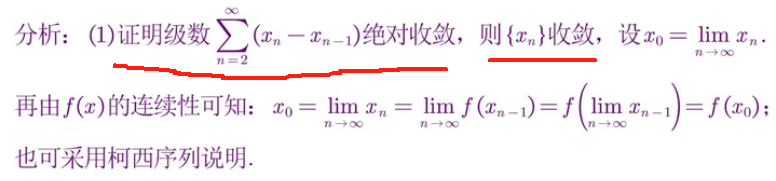
证明 { x k = f ( x k − 1 ) } k = 1 ∞ \{x_k=f(x_{k-1})\}_{k=1}^\infty {xk=f(xk−1)}k=1∞ 是柯西序列, 因此是 收敛的。
——————————————
由于 f f f 是 收缩映射, 则有
∣ ∣ x k + 1 − x k ∣ ∣ = ∣ ∣ f ( x k ) − f ( x k − 1 ) ∣ ∣ ≤ γ ∣ ∣ x k − x k − 1 ∣ ∣ ||x_{k+1}-x_k||=||f(x_k)-f(x_{k-1})||\leq\gamma||x_k-x_{k-1}|| ∣∣xk+1−xk∣∣=∣∣f(xk)−f(xk−1)∣∣≤γ∣∣xk−xk−1∣∣
类似地 ,有
∣
∣
x
k
−
x
k
−
1
∣
∣
≤
γ
∣
∣
x
k
−
1
−
x
k
−
2
∣
∣
||x_k-x_{k-1}||\leq\gamma||x_{k-1}-x_{k-2}||
∣∣xk−xk−1∣∣≤γ∣∣xk−1−xk−2∣∣
⋮
\vdots
⋮
∣
∣
x
2
−
x
1
∣
∣
≤
γ
∣
∣
x
1
−
x
0
∣
∣
||x_2-x_1||\leq\gamma||x_1-x_0||
∣∣x2−x1∣∣≤γ∣∣x1−x0∣∣
则
∣ ∣ x k + 1 − x k ∣ ∣ ≤ γ ∣ ∣ x k − x k − 1 ∣ ∣ ≤ γ 2 ∣ ∣ x k − 1 − x k − 2 ∣ ∣ ⋮ ≤ γ k ∣ ∣ x 1 − x 0 ∣ ∣ \begin{aligned}||x_{k+1}-x_k||&\leq\gamma||x_k-x_{k-1}||\\ &\leq\gamma^2||x_{k-1}-x_{k-2}||\\ & \vdots\\ &\leq\gamma^k||x_1-x_0||\end{aligned} ∣∣xk+1−xk∣∣≤γ∣∣xk−xk−1∣∣≤γ2∣∣xk−1−xk−2∣∣⋮≤γk∣∣x1−x0∣∣
由于 γ < 1 \gamma < 1 γ<1, 对 任意 x 1 , x 0 x_1, x_0 x1,x0 ,当 k → ∞ k\to \infty k→∞, ∣ ∣ x k + 1 − x k ∣ ∣ ||x_{k+1}-x_k|| ∣∣xk+1−xk∣∣ 以指数速度 收敛到 0。
正如 前文所述, 仅满足 x n + 1 − x n → 0 x_{n+1} - x_n→0 xn+1−xn→0 , 无法得到 收敛的结论。 如 发散 的 x n = n x_n= \sqrt n xn=n 。
需要进一步考虑 m > n m > n m>n 时,
∣ ∣ x m − x n ∣ ∣ = ∣ ∣ x m − x m − 1 + x m − 1 − ⋯ − x n + 1 + x n + 1 − x n ∣ ∣ ≤ ∣ ∣ x m − x m − 1 ∣ ∣ + ⋯ + ∣ ∣ x n + 1 − x n ∣ ∣ ≤ γ m − 1 ∣ ∣ x 1 − x 0 ∣ ∣ + ⋯ + γ n ∣ ∣ x 1 − x 0 ∣ ∣ = γ n ( γ m − 1 − n + ⋯ + 1 ) ∣ ∣ x 1 − x 0 ∣ ∣ ≤ γ n ⋅ ∑ i = 1 ∞ γ i ⋅ ∣ ∣ x 1 − x 0 ∣ ∣ γ 的幂次项扩展到无穷多项 = γ n 1 − γ ∣ ∣ x 1 − x 0 ∣ ∣ \begin{aligned}||x_m-x_n||&=||x_m-x_{m-1}+x_{m-1}-\cdots-x_{n+1}+x_{n+1}-x_n||\\ &\leq ||x_m-x_{m-1}||+\cdots+||x_{n+1}-x_n||\\ &\leq \gamma^{m-1} ||x_1-x_0||+\cdots+\gamma^n||x_1-x_0||\\ &=\gamma^n(\gamma^{m-1-n}+\cdots+1)||x_1-x_0||\\ &\leq\gamma^n·\sum\limits_{i=1}^\infty\gamma^i·||x_1-x_0||~~~~~~~\textcolor{blue}{\gamma ~的幂次项扩展到无穷多项}\\ &=\frac{\gamma^n}{1-\gamma} ||x_1-x_0||\\ \end{aligned} ∣∣xm−xn∣∣=∣∣xm−xm−1+xm−1−⋯−xn+1+xn+1−xn∣∣≤∣∣xm−xm−1∣∣+⋯+∣∣xn+1−xn∣∣≤γm−1∣∣x1−x0∣∣+⋯+γn∣∣x1−x0∣∣=γn(γm−1−n+⋯+1)∣∣x1−x0∣∣≤γn⋅i=1∑∞γi⋅∣∣x1−x0∣∣ γ 的幂次项扩展到无穷多项=1−γγn∣∣x1−x0∣∣
对于右侧, γ < 1 \gamma<1 γ<1,为某个 小的值
对任意小的 ε \varepsilon ε, 总能找到 N N N, 使得当 m , n > N m, n > N m,n>N ,有 ∣ ∣ x m − x n ∣ ∣ < ε ||x_m - x_n|| < ε ∣∣xm−xn∣∣<ε,满足柯西极限存在准则, 数列 { x k } \{x_k\} {xk} 收敛。
假设收敛到 x ∗ x^* x∗, lim k → ∞ x k = x ∗ \lim\limits_{k\to\infty}x_k=x^* k→∞limxk=x∗。
2、证明 x ∗ = lim k → ∞ x k x^*=\lim\limits_{k\to\infty}x_k x∗=k→∞limxk 是一个不动点。
由于 ∣ ∣ f ( x k ) − x k ∣ ∣ = ∣ ∣ x k + 1 − x k ∣ ∣ ≤ γ k ∣ ∣ x 1 − x 0 ∣ ∣ ||f(x_k)-x_k||=||x_{k+1}-x_k||\leq\gamma^k||x_1-x_0|| ∣∣f(xk)−xk∣∣=∣∣xk+1−xk∣∣≤γk∣∣x1−x0∣∣
已知 ∣ ∣ f ( x k ) − x k ∣ ∣ ||f(x_k)-x_k|| ∣∣f(xk)−xk∣∣ 以指数速度 收敛于 0。则 f ( x ∗ ) = x ∗ f(x^*)=x^*~~~ f(x∗)=x∗ 两边同时 取极限
lim k → ∞ ∣ ∣ f ( x k ) − x k ∣ ∣ = 0 \lim\limits_{k\to\infty}||f(x_k)-x_k||=0 k→∞lim∣∣f(xk)−xk∣∣=0
3、证明 不动点 唯一。
假设 存在另外的不动点 x ′ x^\prime x′, 满足 f ( x ′ ) = x ′ f(x^\prime) =x^\prime f(x′)=x′
∣ ∣ x ′ − x ∗ ∣ ∣ = ∣ ∣ f ( x ′ ) − f ( x ∗ ) ∣ ∣ ≤ γ ∣ ∣ x ′ − x ∗ ∣ ∣ ||x^\prime-x^*||=||f(x^\prime)-f(x^*)||\leq\gamma||x^\prime-x^*|| ∣∣x′−x∗∣∣=∣∣f(x′)−f(x∗)∣∣≤γ∣∣x′−x∗∣∣
由于 γ < 1 \gamma < 1 γ<1, 当且仅当 ∣ ∣ x ′ − x ∗ ∣ ∣ = 0 ||x^\prime-x^*||=0 ∣∣x′−x∗∣∣=0 时不等式成立。因此, 只能是 x ′ = x ∗ x^\prime=x^* x′=x∗。
或者不等式两边同除 ∣ ∣ x ′ − x ∗ ∣ ∣ ||x^\prime-x^*|| ∣∣x′−x∗∣∣, 得到 γ ≥ 1 \gamma\geq1 γ≥1,与题设 γ < 1 \gamma < 1 γ<1矛盾,因此不动点唯一。
4、证明 x k x_k xk 以指数速度收敛于 x ∗ x^* x∗。
由之前的 ∣ ∣ x m − x n ∣ ∣ ≤ γ n 1 − γ ∣ ∣ x 1 − x 0 ∣ ∣ ||x_m-x_n|| \leq \frac{\gamma^n}{1-\gamma}||x_1-x_0|| ∣∣xm−xn∣∣≤1−γγn∣∣x1−x0∣∣
由于 m m m 可以是任意大。
x ∗ − x n = lim m → ∞ ∣ ∣ x m − x n ∣ ∣ ≤ γ n 1 − γ ∣ ∣ x 1 − x 0 ∣ ∣ x^*-x_n =\lim\limits_{m\to\infty}||x_m-x_n||\leq \frac{\gamma^n}{1-\gamma}||x_1-x_0|| x∗−xn=m→∞lim∣∣xm−xn∣∣≤1−γγn∣∣x1−x0∣∣
由于 γ < 1 \gamma<1 γ<1, 当 n → ∞ n→∞ n→∞ 时,误差以指数速度 收敛于 0。
——————————
补充: 参考链接



其它可参考链接:
链接 1:数分之梯丨压缩映射定理——同济大学陈滨
链接 2:柯西收敛准则有啥用?当然是证明压缩映射原理!
证明 2:证明 贝尔曼最优方程 的右侧 是 压缩映射的
考虑 两个 向量
v
1
,
v
2
∈
R
∣
S
∣
\bm v_1, \bm v_2\in \mathbb R^{|\cal S|}
v1,v2∈R∣S∣
π 1 ∗ = ˙ arg max π ( r π + γ P π v 1 ) \pi_1^*\dot=\arg\max\limits_\pi(\bm r_\pi+\gamma\bm P_\pi\bm v_1) π1∗=˙argπmax(rπ+γPπv1)
π 2 ∗ = ˙ arg max π ( r π + γ P π v 2 ) \pi_2^*\dot=\arg\max\limits_\pi(\bm r_\pi+\gamma\bm P_\pi\bm v_2) π2∗=˙argπmax(rπ+γPπv2)
f ( v 1 ) = max π ( r π + γ P π v 1 ) = r π 1 ∗ + γ P π 1 ∗ v 1 ≥ r π 2 ∗ + γ P π 2 ∗ v 1 f(\bm v_1)=\max\limits_\pi(\bm r_\pi+\gamma\bm P_\pi\bm v_1)=\bm r_{\pi_1^*}+\gamma\bm P_{\pi_1^*}\bm v_1\geq \bm r_{\pi_2^*}+\gamma\bm P_{\pi_2^*}\bm v_1~~~~~ f(v1)=πmax(rπ+γPπv1)=rπ1∗+γPπ1∗v1≥rπ2∗+γPπ2∗v1 对于同一状态值 v 1 v_1 v1 ,最佳策略 π 1 ∗ \pi_1^* π1∗ 相应的状态值 必然大于 其它策略的
f ( v 2 ) = max π ( r π + γ P π v 2 ) = r π 2 ∗ + γ P π 2 ∗ v 2 ≥ r π 1 ∗ + γ P π 1 ∗ v 2 f(\bm v_2)=\max\limits_\pi(\bm r_\pi+\gamma\bm P_\pi\bm v_2)=\bm r_{\pi_2^*}+\gamma\bm P_{\pi_2^*}\bm v_2\geq \bm r_{\pi_1^*}+\gamma\bm P_{\pi_1^*}\bm v_2~~~~~ f(v2)=πmax(rπ+γPπv2)=rπ2∗+γPπ2∗v2≥rπ1∗+γPπ1∗v2
≥ \geq ≥ 是 元素级的。
f ( v 1 ) − f ( v 2 ) = r π 1 ∗ + γ P π 1 ∗ v 1 − ( r π 2 ∗ + γ P π 2 ∗ v 2 ) ≤ r π 1 ∗ + γ P π 1 ∗ v 1 − ( r π 1 ∗ + γ P π 1 ∗ v 2 ) = γ P π 1 ∗ ( v 1 − v 2 ) \begin{aligned}f(\bm v_1)-f(\bm v_2)&=\bm r_{\pi_1^*}+\gamma\bm P_{\pi_1^*}\bm v_1-(\bm r_{\pi_2^*}+\gamma\bm P_{\pi_2^*}\bm v_2)\\ &\leq \bm r_{\pi_1^*}+\gamma\bm P_{\pi_1^*}\bm v_1-(\bm r_{\pi_1^*}+\gamma\bm P_{\pi_1^*}\bm v_2)\\ &=\gamma\bm P_{\pi_1^*}(\bm v_1-\bm v_2)\end{aligned} f(v1)−f(v2)=rπ1∗+γPπ1∗v1−(rπ2∗+γPπ2∗v2)≤rπ1∗+γPπ1∗v1−(rπ1∗+γPπ1∗v2)=γPπ1∗(v1−v2)
f ( v 2 ) − f ( v 1 ) = r π 2 ∗ + γ P π 2 ∗ v 2 − ( r π 1 ∗ + γ P π 1 ∗ v 1 ) ≤ r π 2 ∗ + γ P π 2 ∗ v 2 − ( r π 2 ∗ + γ P π 2 ∗ v 1 ) = γ P π 2 ∗ ( v 2 − v 1 ) \begin{aligned}f(\bm v_2)-f(\bm v_1)&=\bm r_{\pi_2^*}+\gamma\bm P_{\pi_2^*}\bm v_2-(\bm r_{\pi_1^*}+\gamma\bm P_{\pi_1^*}\bm v_1)\\ &\leq \bm r_{\pi_2^*}+\gamma\bm P_{\pi_2^*}\bm v_2-(\bm r_{\pi_2^*}+\gamma\bm P_{\pi_2^*}\bm v_1)\\ &=\gamma\bm P_{\pi_2^*}(\bm v_2-\bm v_1)\end{aligned} f(v2)−f(v1)=rπ2∗+γPπ2∗v2−(rπ1∗+γPπ1∗v1)≤rπ2∗+γPπ2∗v2−(rπ2∗+γPπ2∗v1)=γPπ2∗(v2−v1)
γ P π 2 ∗ ( v 1 − v 2 ) ≤ f ( v 1 ) − f ( v 2 ) ≤ γ P π 1 ∗ ( v 1 − v 2 ) \gamma\bm P_{\pi_2^*}(\bm v_1-\bm v_2)\leq f(\bm v_1)-f(\bm v_2)\leq \gamma\bm P_{\pi_1^*}(\bm v_1-\bm v_2) γPπ2∗(v1−v2)≤f(v1)−f(v2)≤γPπ1∗(v1−v2)
令 z = ˙ max { ∣ γ P π 2 ∗ ( v 1 − v 2 ) ∣ , ∣ γ P π 1 ∗ ( v 1 − v 2 ) ∣ } ∈ R ∣ S ∣ z\dot=\max~\{|\gamma\bm P_{\pi_2^*}(\bm v_1-\bm v_2)|, |\gamma\bm P_{\pi_1^*}(\bm v_1-\bm v_2)|\}\in\mathbb R^{|\cal S|} z=˙max {∣γPπ2∗(v1−v2)∣,∣γPπ1∗(v1−v2)∣}∈R∣S∣
z ≥ 0 z\geq0 z≥0
− z ≤ γ P π 2 ∗ ( v 1 − v 2 ) ≤ f ( v 1 ) − f ( v 2 ) ≤ γ P π 1 ∗ ( v 1 − v 2 ) ≤ z -z\leq\gamma\bm P_{\pi_2^*}(\bm v_1-\bm v_2)\leq f(\bm v_1)-f(\bm v_2)\leq \gamma\bm P_{\pi_1^*}(\bm v_1-\bm v_2)\leq z −z≤γPπ2∗(v1−v2)≤f(v1)−f(v2)≤γPπ1∗(v1−v2)≤z
∣ f ( v 1 ) − f ( v 2 ) ∣ ≤ z |f(\bm v_1)-f(\bm v_2)|\leq z ∣f(v1)−f(v2)∣≤z
最大模 ∣ ∣ f ( v 1 ) − f ( v 2 ) ∣ ∣ ∞ ≤ ∣ ∣ z ∣ ∣ ∞ ||f(\bm v_1)-f(\bm v_2)||_\infty\leq ||z||_\infty ∣∣f(v1)−f(v2)∣∣∞≤∣∣z∣∣∞
p i T p_i^T piT, q i T q_i^T qiT 分别为 P π 1 ∗ \bm P_{\pi_1^*} Pπ1∗ 和 P π 2 ∗ \bm P_{\pi_2^*} Pπ2∗ 的 第 i i i 行。
z i = max { γ ∣ p i T ( v 1 − v 2 ) ∣ , γ ∣ q i T ( v 1 − v 2 ) ∣ } z_i=\max~\{\gamma |p_i^T(\bm v_1-\bm v_2)|, \gamma|q_i^T(\bm v_1-\bm v_2)|\} zi=max {γ∣piT(v1−v2)∣,γ∣qiT(v1−v2)∣}
p i p_i pi 是一个包含所有非负元素的向量并且所有元素的和等于 1。
∣ p i T ( v 1 − v 2 ) ∣ ≤ p i T ∣ v 1 − v 2 ∣ ≤ ∣ ∣ v 1 − v 2 ∣ ∣ ∞ |p_i^T(\bm v_1-\bm v_2)|\leq p_i^T|\bm v_1-\bm v_2|\leq||\bm v_1-\bm v_2||_\infty ∣piT(v1−v2)∣≤piT∣v1−v2∣≤∣∣v1−v2∣∣∞
类似地 , ∣ q i T ( v 1 − v 2 ) ∣ ≤ ∣ ∣ v 1 − v 2 ∣ ∣ ∞ |q_i^T(\bm v_1-\bm v_2)|\leq||\bm v_1-\bm v_2||_\infty ∣qiT(v1−v2)∣≤∣∣v1−v2∣∣∞
z i ≤ γ ∣ ∣ v 1 − v 2 ∣ ∣ ∞ z_i\leq\gamma||\bm v_1-\bm v_2||_\infty zi≤γ∣∣v1−v2∣∣∞
∣ ∣ z ∣ ∣ ∞ = max i ∣ z i ∣ ≤ γ ∣ ∣ v 1 − v 2 ∣ ∣ ∞ ||z||_\infty=\max\limits_i|z_i|\leq\gamma||\bm v_1-\bm v_2||_\infty ∣∣z∣∣∞=imax∣zi∣≤γ∣∣v1−v2∣∣∞
即 ∣ ∣ f ( v 1 ) − f ( v 2 ) ∣ ∣ ∞ ≤ γ ∣ ∣ v 1 − v 2 ∣ ∣ ∞ ||f(\bm v_1)-f(\bm v_2)||_\infty\leq \gamma||\bm v_1-\bm v_2||_\infty ∣∣f(v1)−f(v2)∣∣∞≤γ∣∣v1−v2∣∣∞
证毕。
证明 3: 贝尔曼最优方程的解对应 最大状态值 和 最优策略
P58
对于 任意 策略 π \pi π, 满足 贝尔曼方程为 v π = r π + γ P π v π v_\pi=r_\pi+\gamma P_\pi v_\pi vπ=rπ+γPπvπ
由于 最优策略 v ∗ = max π ( r π + γ P π v ∗ ) = r π ∗ + γ P π ∗ v ∗ ≥ r π + γ P π v ∗ v^*=\max\limits_\pi(r_\pi+\gamma P_\pi v^*)=r_{\pi^*}+\gamma P_{\pi^*} v^*\geq r_\pi+\gamma P_\pi v^* v∗=πmax(rπ+γPπv∗)=rπ∗+γPπ∗v∗≥rπ+γPπv∗
v ∗ − v π ≥ r π ∗ + γ P π ∗ v ∗ − ( r π + γ P π v π ) = γ P π ( v ∗ − v π ) v^*-v_\pi\geq r_{\pi^*}+\gamma P_{\pi^*} v^*-(r_\pi+\gamma P_\pi v_\pi)=\gamma P_\pi (v^*-v_\pi) v∗−vπ≥rπ∗+γPπ∗v∗−(rπ+γPπvπ)=γPπ(v∗−vπ)
重复应用上述不等式:
v ∗ − v π ≥ γ P π ( v ∗ − v π ) ≥ γ 2 P π 2 ( v ∗ − v π ) ≥ ⋯ ≥ γ n P π n ( v ∗ − v π ) v^*-v_\pi\geq\gamma P_\pi (v^*-v_\pi)\geq\gamma^2 P^2_\pi (v^*-v_\pi)\geq\cdots\geq\gamma^n P^n_\pi (v^*-v_\pi) v∗−vπ≥γPπ(v∗−vπ)≥γ2Pπ2(v∗−vπ)≥⋯≥γnPπn(v∗−vπ)
v ∗ − v π ≤ lim n → ∞ γ n P π n ( v ∗ − v π ) = 0 v^*-v_\pi\leq\lim\limits_{n\to\infty}\gamma^n P^n_\pi (v^*-v_\pi)=0 v∗−vπ≤n→∞limγnPπn(v∗−vπ)=0
由于 γ < 1 \gamma<1 γ<1 且 P π n P^n_\pi Pπn 是 元素均小于或等于 1 的非负矩阵 P π n 1 = 1 P^n_\pi \bm1=\bm1 Pπn1=1
因此 v ∗ ≥ v π v^*\geq v_\pi v∗≥vπ 对于任意 π \pi π 均成立。
证明 4: 对所有 reward 统一进行 仿射变换, 最优策略 不变
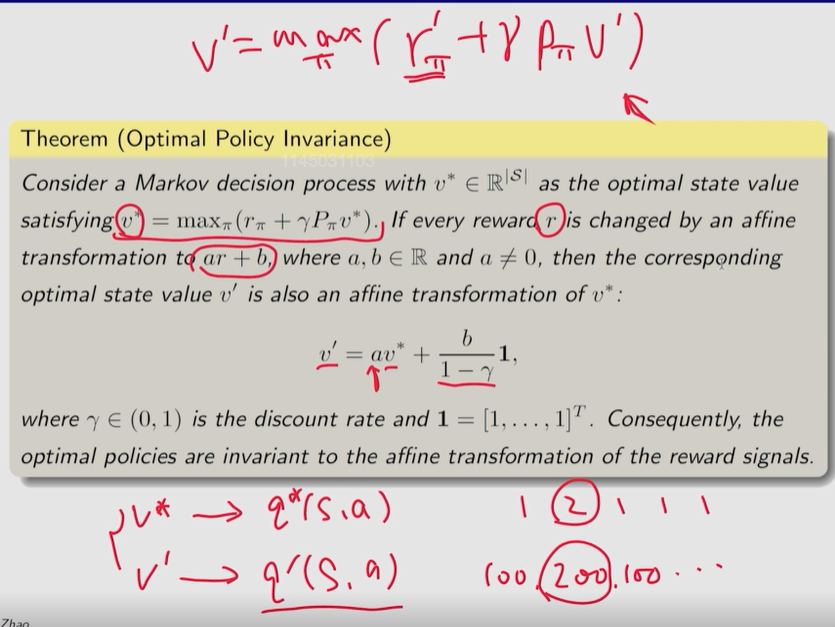
最优策略不变性
最优策略 v ∗ = max π ( r π + γ P π v ∗ ) \bm v^*=\max\limits_\pi(\bm r_\pi+\gamma \bm P_\pi \bm v^*) v∗=πmax(rπ+γPπv∗)
对 其中的 每个奖励值 r r r 都进行 仿射变换 α r + β \alpha r + \beta αr+β
则相应的 最优 状态值 v ′ = α v ∗ + β 1 − γ [ 1 1 . . . 1 1 ] \bm v^\prime=\alpha \bm v^*+\frac{\beta}{1-\gamma}\begin{bmatrix}1\\1\\...\\1\\1\end{bmatrix} v′=αv∗+1−γβ 11...11
其中 折扣率
γ
∈
(
0
,
1
)
\gamma \in (0, 1)
γ∈(0,1)
由
v
′
\bm v^\prime
v′ 得到的最优策略 对于奖励值的仿射变换是不变的。
————————————————————————
P62 -
证明:
对 任意 策略 π \pi π, 令 r π = [ ⋯ , r π ( s ) , ⋯ ] T r_\pi=[\cdots,r_\pi(s), \cdots]^T rπ=[⋯,rπ(s),⋯]T
r π ( s ) = ∑ a ∈ A π ( a ∣ s ) ∑ r ∈ R p ( r ∣ s , a ) r , s ∈ S r_\pi(s)= \sum\limits_{a\in\cal A}\pi(a|s)\sum\limits_{r\in\cal R}p(r|s, a)r,~~~~~s\in\cal S rπ(s)=a∈A∑π(a∣s)r∈R∑p(r∣s,a)r, s∈S
如果 r → α r + β r\to\alpha r+\beta r→αr+β, 则 r π ( s ) → α r π ( s ) + β r_\pi(s)\to\alpha r_\pi(s)+\beta rπ(s)→αrπ(s)+β
r π → α r π + β 1 r_\pi\to\alpha r_\pi+\beta{\bf1} rπ→αrπ+β1, 其中 1 = [ 1 , ⋯ , 1 ] T \bm 1=[1, \cdots,1]^T 1=[1,⋯,1]T
此时, 贝尔曼最优公式 变成:
v ′ = max π ( α r π + β 1 + γ P π v ′ ) ( 3.9 ) \bm v^\prime=\max\limits_\pi(\alpha\bm r_\pi+\beta \bm1+\gamma\bm P_\pi\bm v^\prime)~~~~~~~~~~~~~~(3.9) v′=πmax(αrπ+β1+γPπv′) (3.9)
设 v ′ = α v ∗ + c 1 \bm v^\prime=\alpha \bm v^*+c\bm 1 v′=αv∗+c1 是 上述 式 (3.9) 的解 ~~~ [ 类似于 求解 微分方程时设 解为 ax + b, 后续根据相关 条件进一步确定 a, b
将 v ′ = α v ∗ + c 1 \bm v^\prime=\alpha \bm v^*+c\bm 1 v′=αv∗+c1 代入 (3.9)
α v ∗ + c 1 = max π ( α r π + β 1 + γ P π ( α v ∗ + c 1 ) ) = max π ( α r π + β 1 + γ α P π v ∗ + γ c 1 ) \alpha \bm v^*+c\bm 1=\max\limits_\pi\Big(\alpha\bm r_\pi+\beta \bm1+\gamma\bm P_\pi(\alpha \bm v^*+c\bm 1)\Big)=\max\limits_\pi (\alpha\bm r_\pi+\beta \bm1+\gamma\alpha\bm P_\pi \bm v^*+\gamma c\bm 1 ) αv∗+c1=πmax(αrπ+β1+γPπ(αv∗+c1))=πmax(αrπ+β1+γαPπv∗+γc1)
注意 P π 1 = 1 \bm P_\pi\bm 1=\bm1 Pπ1=1
α v ∗ = max π ( α r π + γ α P π v ∗ ) ⏟ α v ∗ + β 1 + + γ c 1 − c 1 \alpha\bm v^*=\underbrace{\max\limits_\pi (\alpha\bm r_\pi+ \gamma\alpha\bm P_\pi \bm v^*)}_{\alpha\bm v^*}+\beta \bm1++\gamma c\bm 1-c\bm1 αv∗=αv∗ πmax(αrπ+γαPπv∗)+β1++γc1−c1
即 β 1 + + γ c 1 − c 1 = 0 \beta \bm1++\gamma c\bm 1-c\bm1=0 β1++γc1−c1=0
c = β 1 − γ c=\frac{\beta}{1-\gamma} c=1−γβ
说明 v ′ = α v ∗ + c 1 \bm v^\prime=\alpha \bm v^*+c\bm 1 v′=αv∗+c1 是 式 (3.9) 的解,其中 c = β 1 − γ c=\frac{\beta}{1-\gamma} c=1−γβ。
又因为 式 (3.9) 也是 贝尔曼最优公式, v ′ v^\prime v′ 就是唯一解。
由于 v ′ v^\prime v′ 是 v ∗ v^* v∗ 的 仿射变换,动作值 之间的 相对关系 保持不变。
v π ( s ) = ∑ a π ( a ∣ s ) q π ( s , a ) v_\pi(s)=\sum\limits_a\pi(a|s)q_\pi(s, a) vπ(s)=a∑π(a∣s)qπ(s,a)
这里提 动作值 可能是因为:
最优策略 π ( s ) π(s) π(s) 是选择具有 最大 q ( s , a ) q(s, a) q(s,a) 的动作的策略 。
因为 动作值 相对关系不变,因此 仍是之前选择的动作的 q ( s , a ) q(s, a) q(s,a) 最大,仍会选择这个动作。
最终的最优策略的 每一步动作都是 都是通过 选择动作里 q ( s , a ) q(s, a) q(s,a) 最大的动作,这样获得最优策略的吗?
——> 是的, 后续会给出一些证明。即使中间选错了某些动作【比如 具有最大 q q q 的动作有好几个】,经过后续的迭代后,仍会收敛到 最优策略。
因此, 根据
v
′
v^\prime
v′ 得到的贪心最优策略 和
v
∗
v^*
v∗ 的一样。
即
arg
max
π
(
r
π
+
γ
P
π
v
′
)
\arg\max\limits_\pi(r_\pi+\gamma P_\pi v^\prime)
argπmax(rπ+γPπv′) 和
arg
max
π
(
r
π
+
γ
P
π
v
∗
)
\arg\max\limits_\pi(r_\pi+\gamma P_\pi v^*)
argπmax(rπ+γPπv∗)















 743
743











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









