










👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
上一次降落一个比较简单的:
模糊RBF神经网络(Radial Basis Function Neural Network,径向基函数神经网络)是一种结合模糊逻辑和RBF神经网络的技术,常用于控制系统中的轨迹跟踪任务。下面是关于模糊RBF神经网络轨迹跟踪的一些基本概念和主要步骤:
1. 基本概念
- **模糊逻辑系统**:模糊逻辑系统通过模糊规则和模糊集合进行推理,可以处理不确定性和非线性问题。
- **RBF神经网络**:RBF神经网络是一种三层前馈神经网络,包括输入层、隐含层和输出层。隐含层使用径向基函数(如高斯函数)作为激活函数。
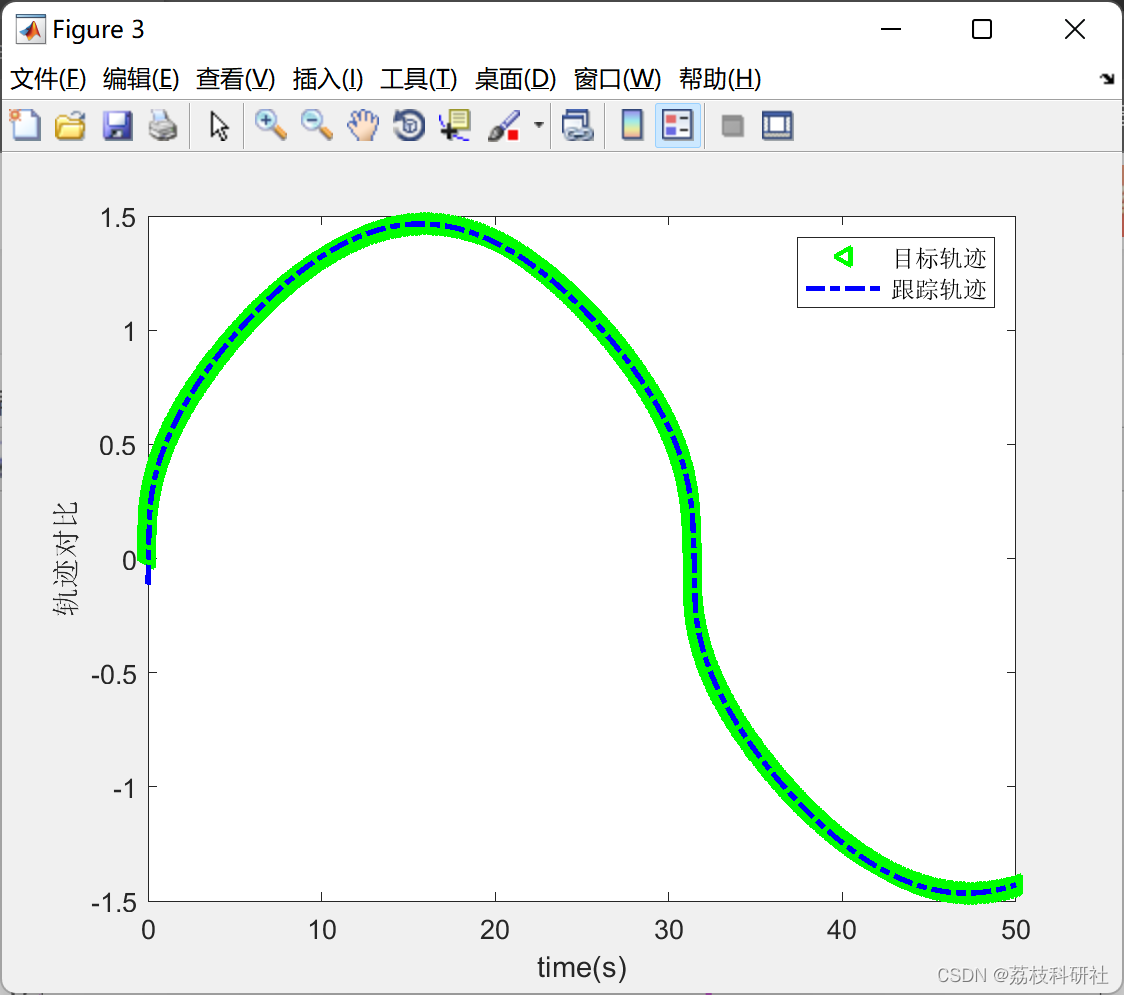
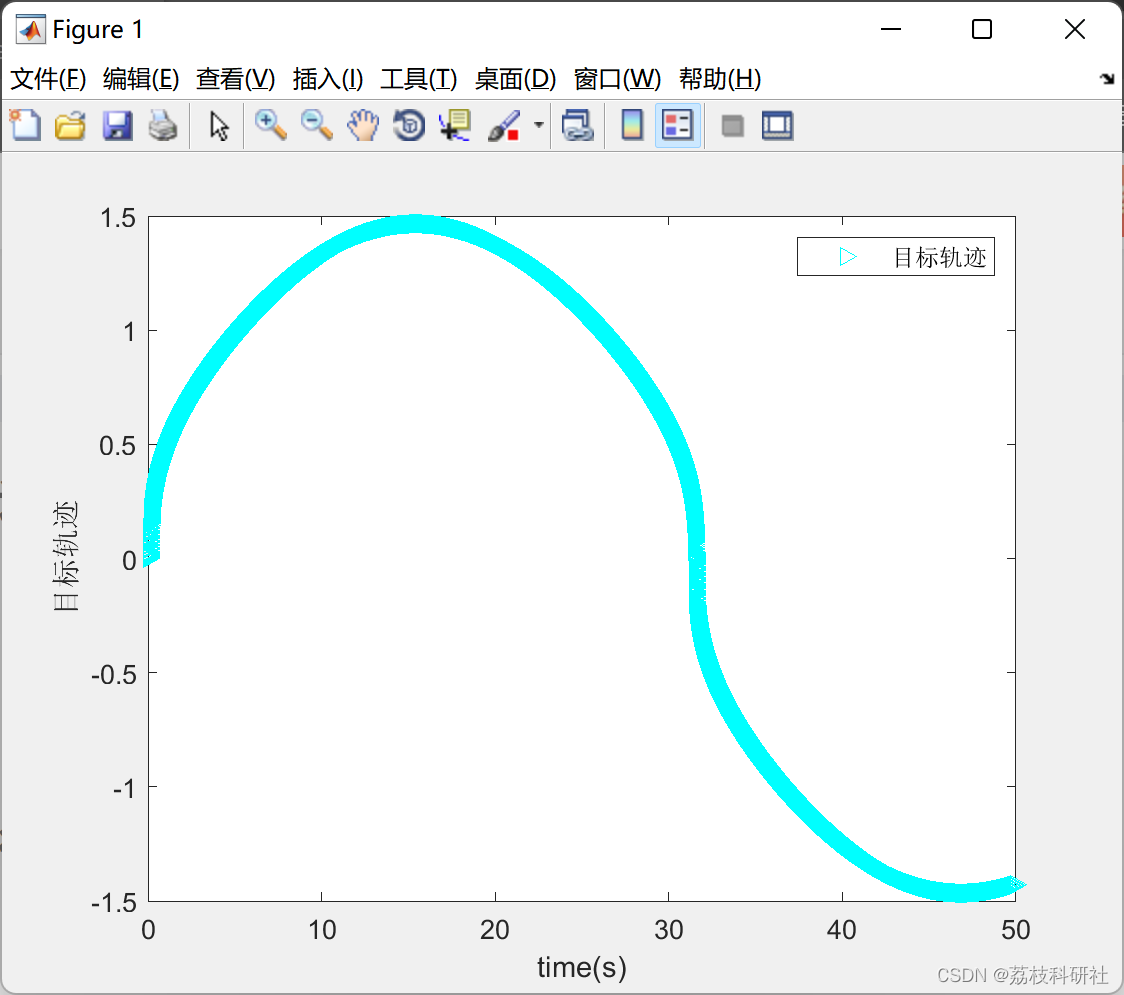
- **轨迹跟踪**:轨迹跟踪目标是使系统输出准确跟随预定轨迹,通常需要处理系统的不确定性和外界干扰。
2. 模糊RBF神经网络的优势
结合模糊逻辑和RBF神经网络的优点,模糊RBF神经网络可以更好地处理非线性和不确定性问题。模糊逻辑提供了处理不确定性的能力,而RBF神经网络具备强大的函数逼近能力。
3. 设计步骤
1. **系统建模**:
- 确定系统的状态变量和输出。
- 建立系统的数学模型(通常是非线性微分方程)。
2. **模糊化**:
- 确定输入变量和输出变量的模糊集合。
- 设计模糊规则(如“如果状态是A并且输出是B,那么控制动作是C”)。
3. **RBF网络结构设计**:
- 选择隐含层的节点数。
- 确定径向基函数的类型(如高斯函数)。
- 初始化网络权重和节点中心。
4. **模糊推理**:
- 将输入变量进行模糊处理,得到模糊隶属度。
- 使用模糊规则库进行推理,得到模糊输出。
- 将模糊输出进行解模糊化,得到清晰的控制信号。
5. **RBF神经网络训练**:
- 使用训练数据集训练RBF网络,调整网络的权重和节点中心以最小化误差。
- 常用训练算法有梯度下降法和最小二乘法。
6. **控制器设计**:
- 将模糊RBF神经网络设计为控制器,对系统进行实时控制。
- 确定控制律和控制参数。
7. **轨迹跟踪**:
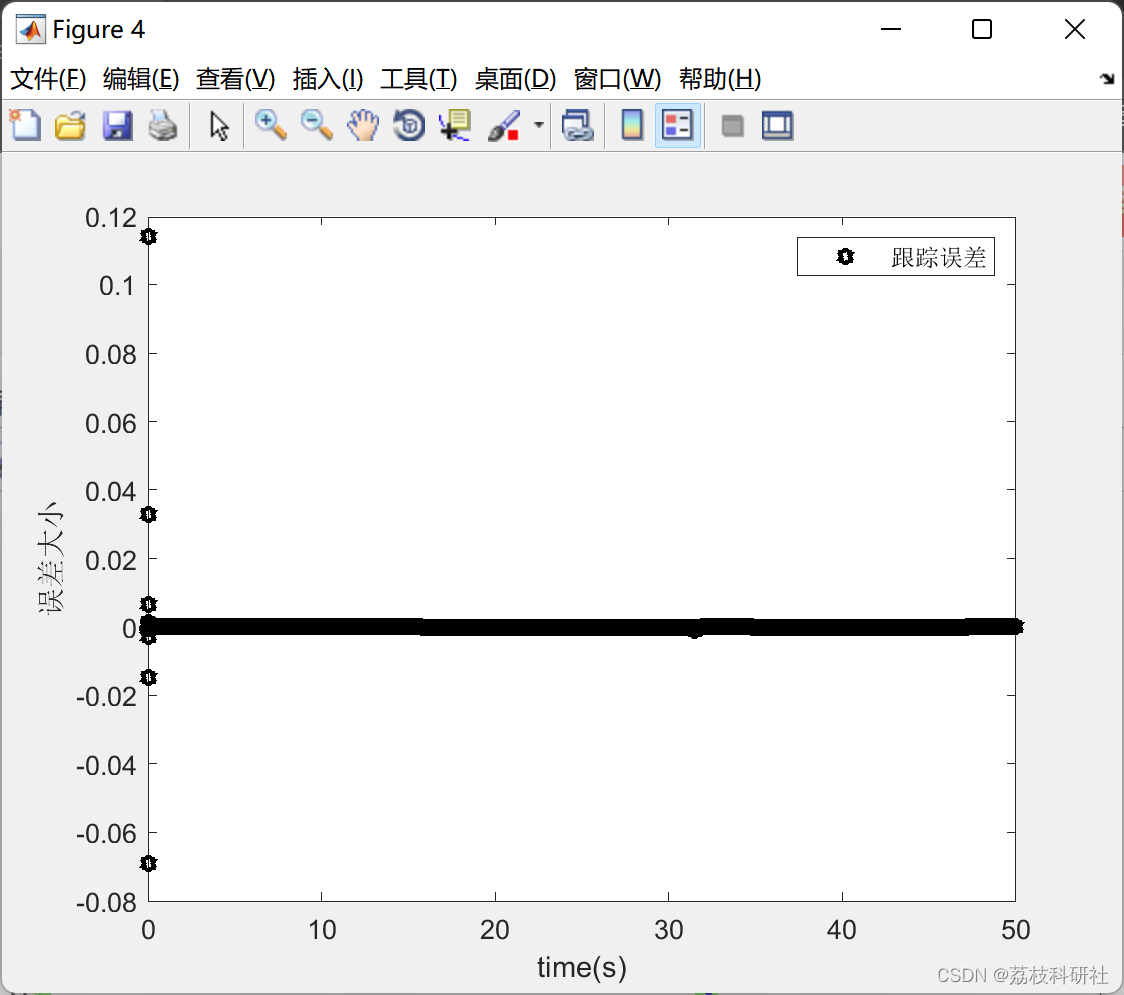
- 导入参考轨迹,实时计算跟踪误差。
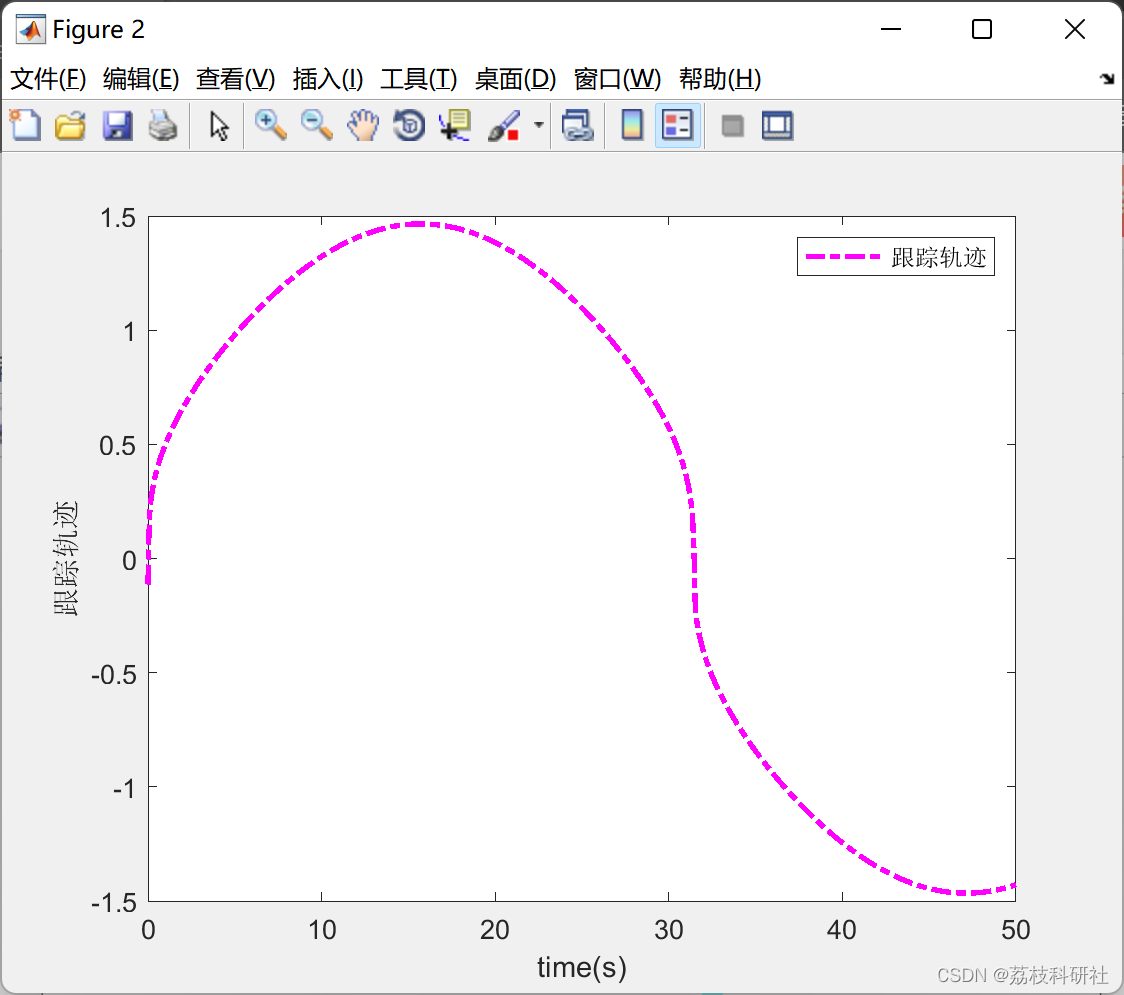
- 通过模糊RBF神经网络控制器产生控制信号,使系统输出跟随参考轨迹。
8. **仿真验证和实际应用**:
- 通过仿真验证控制系统的性能,包括稳定性、响应速度和抗干扰能力。
- 在实际系统中应用控制算法,对控制效果进行验证和调整。
4. 关键技术和注意事项
- **特征选择**:选择合适的输入变量和特征对于提高控制效果至关重要。
- **参数优化**:对模糊规则和RBF网络的参数进行优化,通常需要使用优化算法(如粒子群优化、遗传算法等)。
- **实时性**:确保控制算法能够实时运行,对实时性的要求通常较高。
5. 示例应用
- **机器人路径规划**:用于机器人在复杂环境下的路径规划和导航。
- **飞行器控制**:用于无人机和飞行器的轨迹跟踪控制。
- **工业控制**:用于工业过程控制,确保生产线的稳定运行。
模糊RBF神经网络轨迹跟踪具有广泛的应用前景,通过合理设计和优化,可以实现高效、鲁棒的轨迹跟踪控制。
📚2 运行结果
🌈3 Matlab代码实现
部分代码:
for k=1:1:50000
%时间
time(k)=k*ts;
%% 输入层
%输入正弦值
u(k)=sin(0.1*k*ts);
y(k)=u(k)+y_1/(1+y_1^2);
x=[u(k),y(k)]'; % Layer1:input
y1=x;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 模糊化层
for i=1:1:2 % Layer2:fuzzation
for ii=1:1:5
net2(i,ii)=-(y1(i)-c(i,ii))^2/bj^2;
end
end
for i=1:1:2
for ii=1:1:5
y2(i,ii)=exp(net2(i,ii));
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 模糊推理层
for ii=1:1:5 % Layer3:fuzzy inference(49 rules)
m1(ii)=y2(1,ii);
m2(ii)=y2(2,ii);
end
for i=1:1:5
for ii=1:1:5
y3(i,ii)=m2(i)*m1(ii);
end
end
for k=1:1:50000
%时间
time(k)=k*ts;
%% 输入层
%输入正弦值
u(k)=sin(0.1*k*ts);
y(k)=u(k)+y_1/(1+y_1^2);
x=[u(k),y(k)]'; % Layer1:input
y1=x;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 模糊化层
for i=1:1:2 % Layer2:fuzzation
for ii=1:1:5
net2(i,ii)=-(y1(i)-c(i,ii))^2/bj^2;
end
end
for i=1:1:2
for ii=1:1:5
y2(i,ii)=exp(net2(i,ii));
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 模糊推理层
for ii=1:1:5 % Layer3:fuzzy inference(49 rules)
m1(ii)=y2(1,ii);
m2(ii)=y2(2,ii);
end
for i=1:1:5
for ii=1:1:5
y3(i,ii)=m2(i)*m1(ii);
end
end
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]缸明义,夏兴国,张庆丰,吴彩林.基于模糊神经网络的机械手轨迹跟踪控制系统[J].江汉大学学报(自然科学版),2021,49(01):66-73.DOI:10.16389/j.cnki.cn42-1737/n.2021.01.010.

















 2515
2515











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











