






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
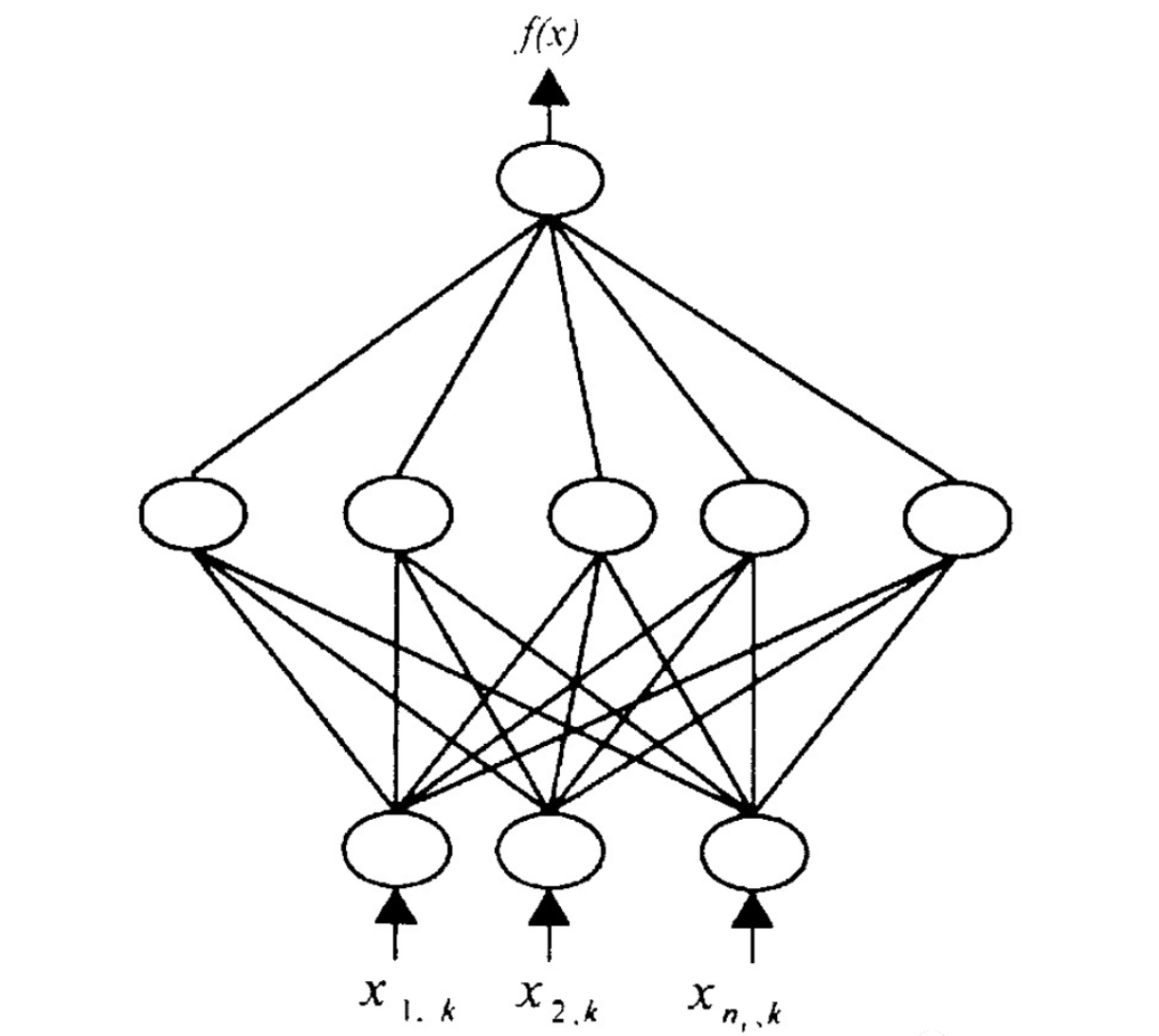
在信号处理、模式识别等系统中,多层前馈网络是应用较为广泛的模型。但是大部分基于反向传播的多层前馈网络的学习算法必须基于某种非线性优化技术的缺点,计算量大、学习速度慢。径向基函数神经网络(Radial Basis Function Neural Network)理论为多层前馈网络的学习提供了一种新颖而有效的手段。RBF网络不仅具有良好的推广能力,而且计算量少,学习速度一般也比其它算法快得多。
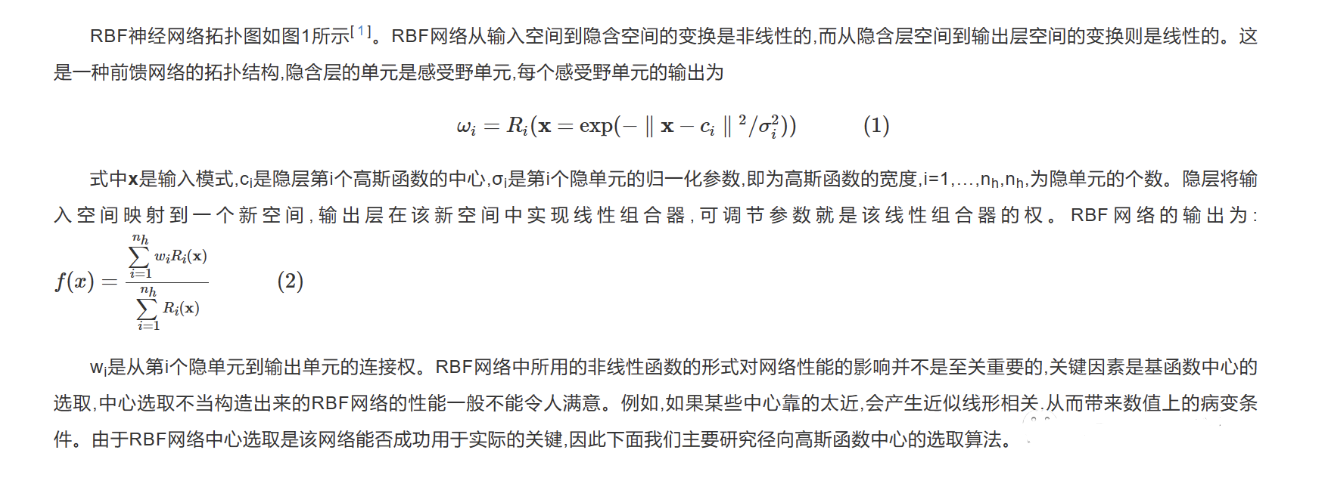
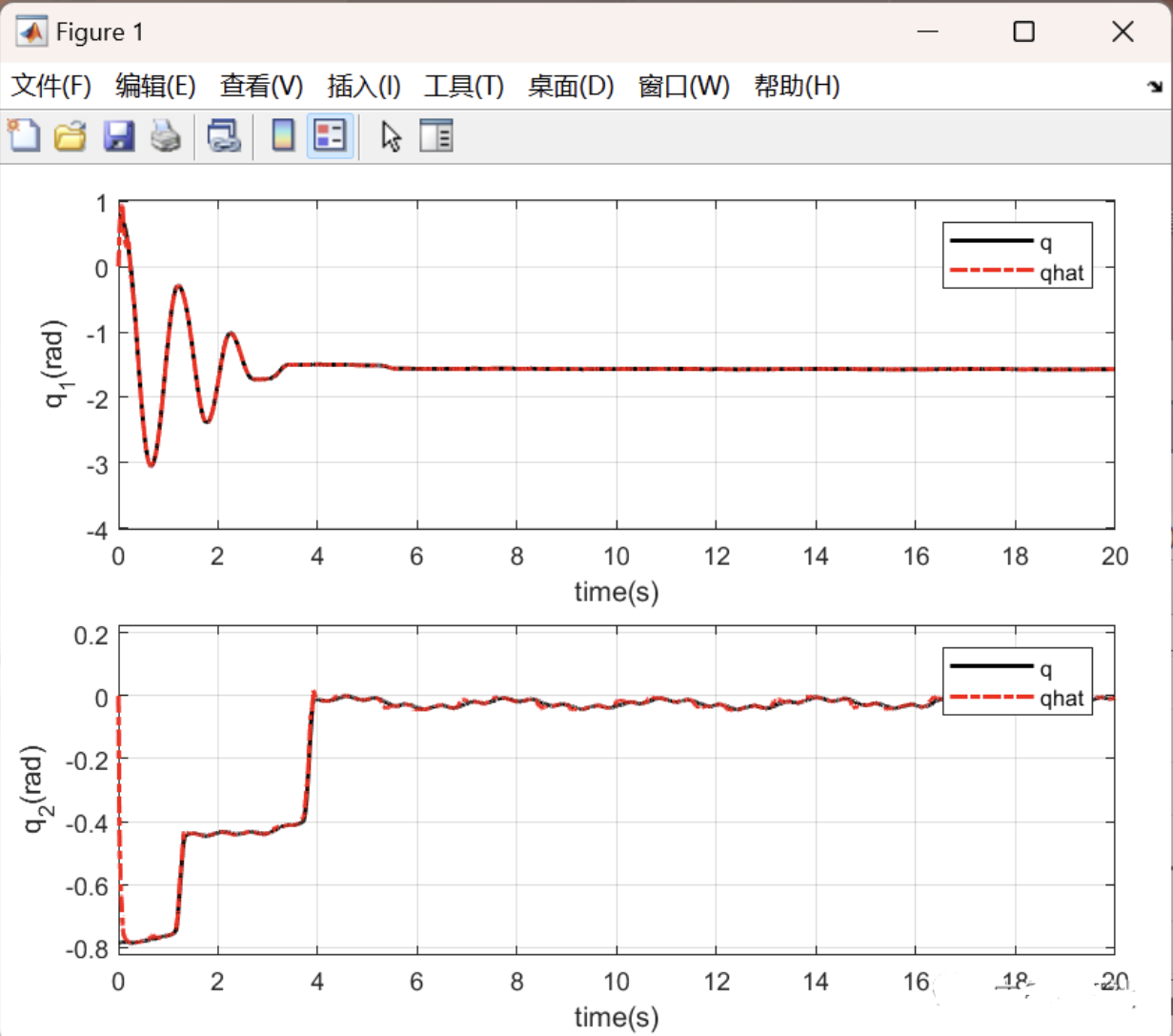
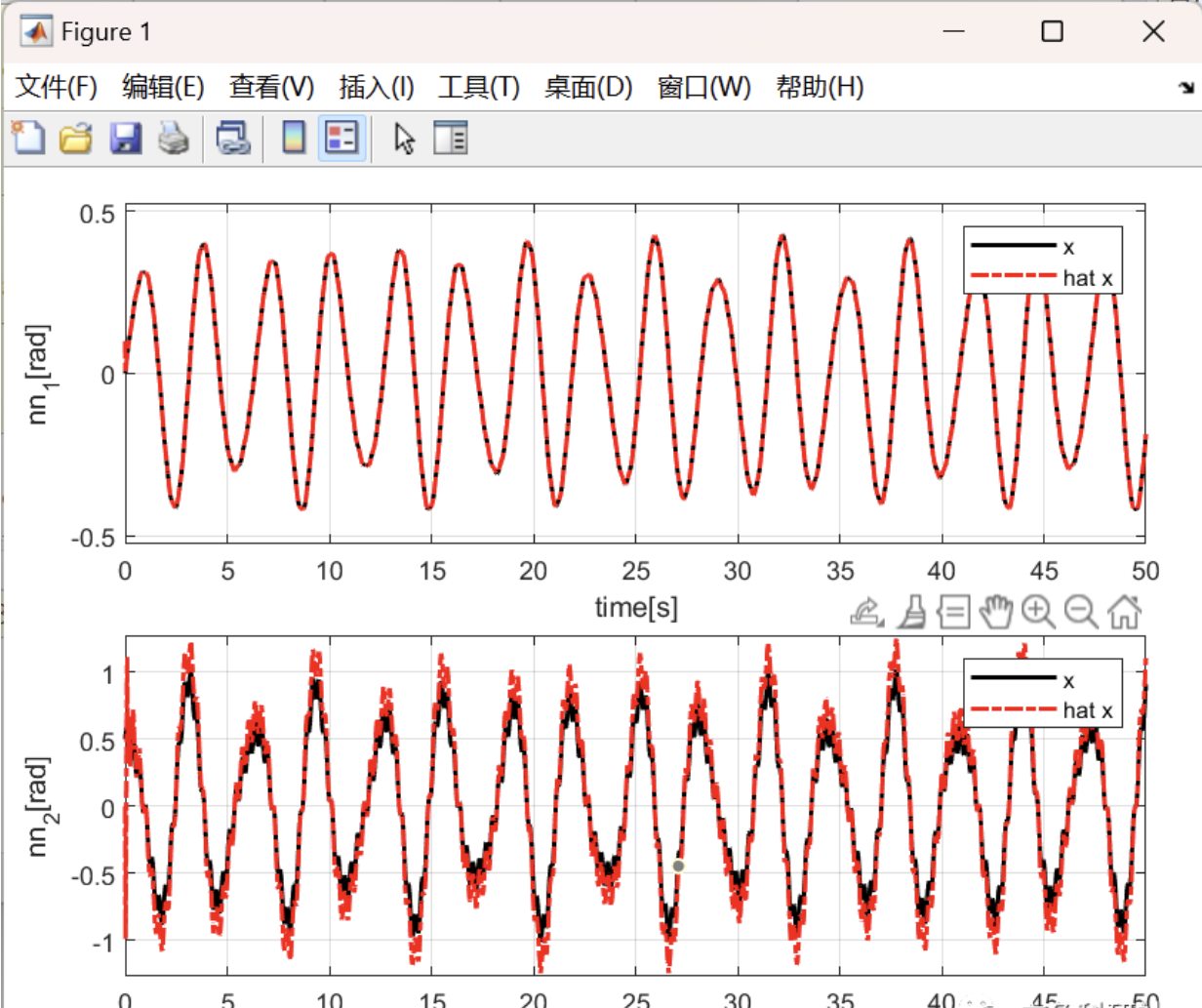
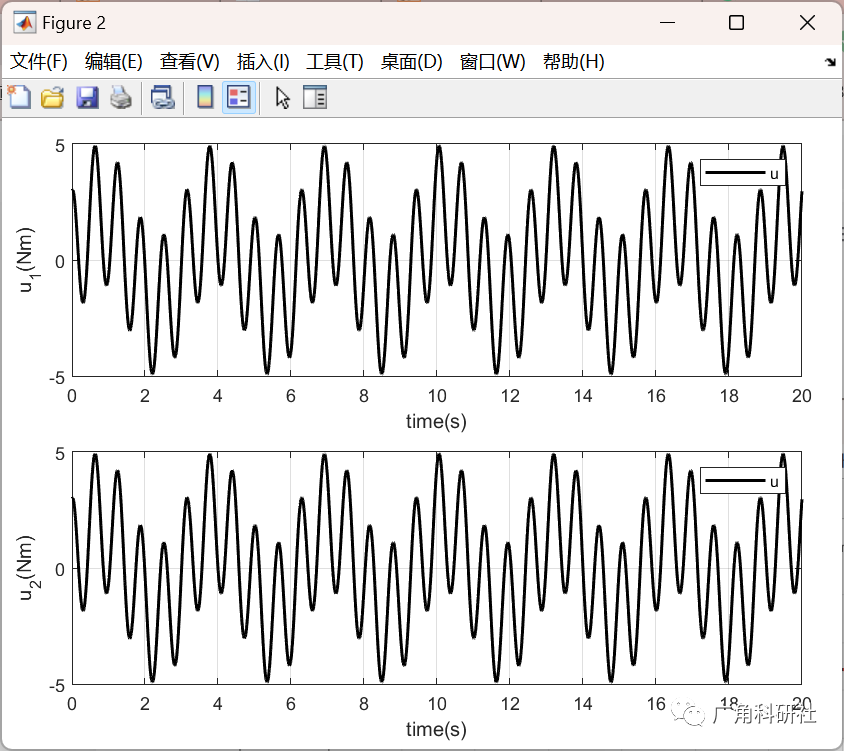
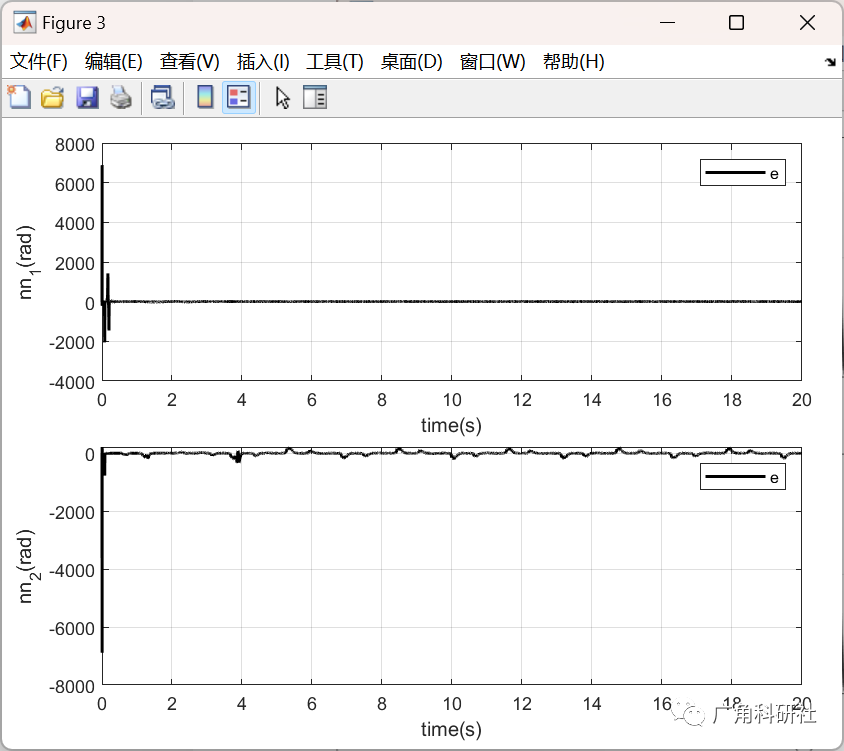
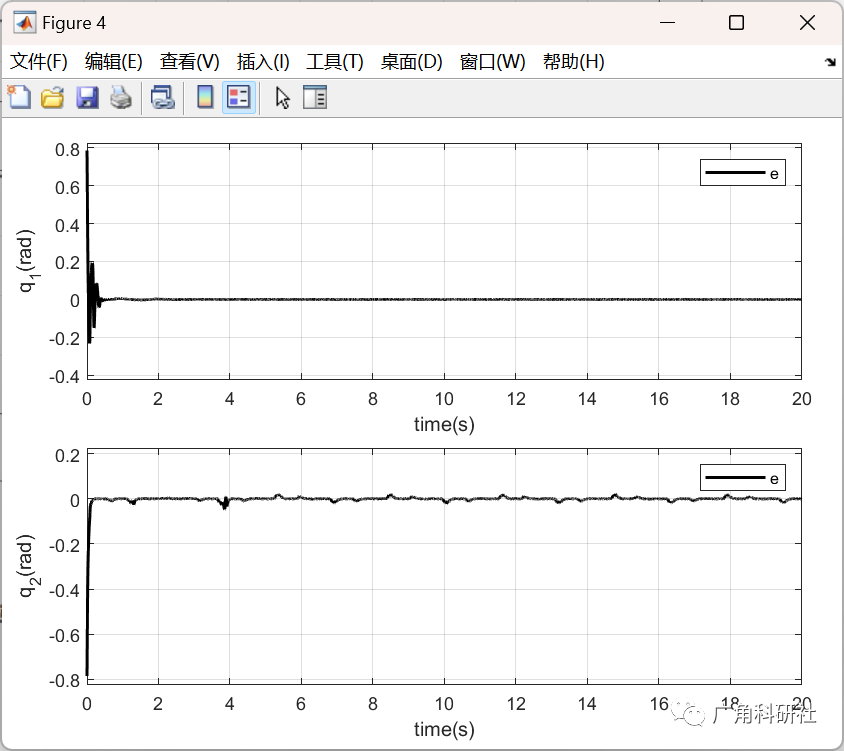
📚2 运行结果
主函数部分代码:
clc; clear all;
addpath(genpath('.'));
% simulation setup
sim_period = 0.001;
t = 0:sim_period:20;
sample_size = size(t, 2);
% % reference trajectory
xd(1,:)=sin(t);
xd(2,:)=cos(t);
xd(3,:)=-sin(t);
% parameter of neural network
variance = 25;
Node = 7;
W1 = zeros(Node, 1);
W2 = zeros(Node, 1);
Mu1 = [-1:2/(Node-1):1]*1/3;
Mu2 = [-1:2/(Node-1):1]*1/3;
Mu = [Mu1; Mu2];
k1=0.01;k2=0.01;
F1= 500*eye(Node);
F2= .5*eye(Node);
% intial state
x(:,1) = [0.2; 0];
x_hat(:,1) = [0.1; 0];
global D K1 K2
H_bar = zeros(Node, 1);
for i=1:sample_size
x1 = x(1,i);
x2 = x(2,i);
x_hat1 = x_hat(1,i);
x_hat2 = x_hat(2,i);
% model
m=1;l=1;M=0.5;g=9.8;
fx=-0.5*m*g*l*sin(x1)/M;
gx=1/M;
% ann
y_tilde = x1 - x_hat(1,i);
H = zeros(Node,1);
for j=1:Node
H(j) = exp(-norm(x(:,i)-Mu(:,j))^2/(variance));
end
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]王旭东,邵惠鹤.RBF神经网络理论及其在控制中的应用[J].信息与控制,1997(04):32-44.















 1400
1400











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









