









👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
文献来源:

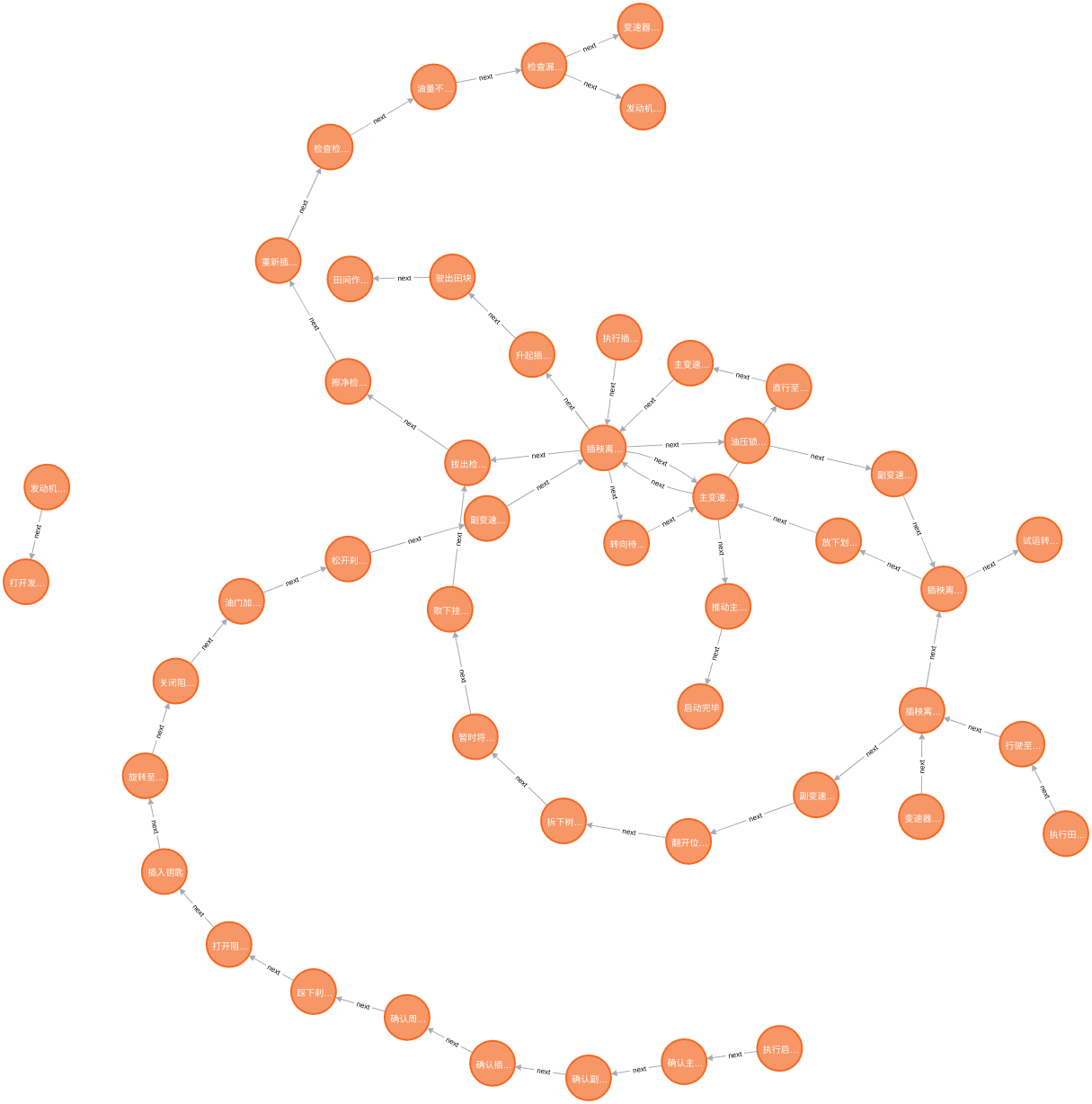
摘要:我国正处于从机械化农业向智慧农业转变的时期,农业智能机器人作为变革农业生产模式、实现农业强国的重要技术,凭借其作业高效、安全可靠、自主智能等优势逐渐成为各国重点研究对象。任务规划作为农业智能机器人自主执行作业任务的重要技术,在很大程度上标志着农业智能机器人的智能化水平,也是机器人研究的前沿热点。本文面向自主作业插秧机进行任务规划研究,针对其作业与任务规划的需求,开展了任务抽象与表达、基于知识图谱的任务规划系统建模、任务规划实验设计与分析等方面的研究。首先,构建了面向机器人作业需求的知识图谱。针对知识图谱构建,设计了基于三元组的机器人任务知识表示方式,对机器人作业的知识进行提取与表示,构建知识集合。然后依据定义的机器人任务规划概念规约,将机器人作业知识导入数据库,构建了面向机器人任务规划的知识图谱。然后,设计了基于知识图谱的机器人任务规划方法。通过深度优先和活动特征匹配度优先的搜索遍历策略搜索知识图谱,生成全部任务规划解;然后分析初始解中的节点之间的关系,通过设定目标优化策略进行统筹优化,从而获得最优规划解。并通过送水任务对比实验以及基于知识图谱的机器人任务规划拓展实验验证了方法的有效性。最后,针对插秧机自主作业,构建了插秧机作业知识图谱。收集和整理插秧机作业知识并表示为三元组结构的知识集合,构建了自主作业插秧机知识图谱,并开展了自主作业插秧机任务规划仿真实验,实验结果表明,知识图谱能够快速构建从任务开始到任务结束的所有可行序列,并且能够生成最优任务规划方案,结果符合实际作业需求。本文将知识图谱技术与机器人任务规划相结合,并应用在自主作业插秧机任务规划中,提高了机器人表征和存储任务作业知识的能力,能够有效的将原子任务知识形成机器人可以理解的上下文信息,并以网络化的形式表达,使得机器人任务规划具备与人类似的联想分析能力,提高了机器人智能化水平。
📚2 运行结果
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]汪鑫禹. 基于知识图谱的自主作业插秧机任务规划研究[D].安徽农业大学,2020.DOI:10.26919/d.cnki.gannu.2020.000235.















 357
357











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











