









👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
文献来源;
无人机路径规划问题是无人机任务规划系统的重要组成部分,需要在复杂领域获得最优路线。针对这一问题,该文结合简化灰狼优化器(SGWO)和改良共生生物搜索(MSOS)提出了一种新型混合算法HSGWO-MSOS。在所提出的算法中,探索和开发能力得到了有效的结合。简化GWO算法的阶段,加快收敛速度,保留种群的探索能力。对SOS算法的共生阶段进行修改,并与GWO合成,以提高开发能力。此外,基于线性差分方程的方法对所提出的HSGWO-MSOS算法进行了收敛分析。使用三次B样条曲线对生成的飞行路线进行平滑处理,使规划路径适合无人机。仿真实验结果表明,HSGWO-MSOS算法能够成功获得可行有效的路线,其性能优于GWO、SOS和SA算法。
原文摘要:
Abstract
Unmanned aerial vehicle (UAV) path planning problem is an important component of UAV mission planning system, which needs to obtain optimal route in the complicated field. To solve this problem, a novel hybrid algorithm called HSGWO-MSOS is proposed by combining simplified grey wolf optimizer (SGWO) and modified symbiotic organisms search (MSOS). In the proposed algorithm, the exploration and exploitation abilities are combined efficiently. The phase of the GWO algorithm is simplified to accelerate the convergence rate and retain the exploration ability of the population. The commensalism phase of the SOS algorithm is modified and synthesized with the GWO to improve the exploitation ability. In addition, the convergence analysis of the proposed HSGWO-MSOS algorithm is presented based on the method of linear difference equation. The cubic B-spline curve is used to smooth the generated flight route and make the planning path be suitable for the UAV. The simulation experimental results show that the HSGWO-MSOS algorithm can acquire a feasible and effective route successfully, and its performance is superior to the GWO, SOS and SA algorithm.
无人驾驶飞行技术的发展是许多国家的必然趋势[1],[2]。作为一种现代空中武器装备,无人机(UAV)因其在复杂和危险环境中工作的潜力而受到更多关注[3]。路径规划设计是无人机任务规划系统中需要的关键任务,需要根据特定的约束条件获取从初始位置到所需目的地的安全高效路线[4]。因此,飞行路径规划问题可以被认为是一个复杂的优化问题,需要高效的算法来解决。作为解决优化问题的有效方法,智能算法已应用于各个领域[5],[6],[7],[8],[9],例如可持续交通项目[10],[11],[12],可持续制造[13],[14],补货的建模和最佳批次大小[15],[16]和供应链网络设计[17],[18],[19],[20],[21],[22],[23],[24]。元启发式算法是受自然启发的智能算法[25],[26],这意味着它们起源于模仿物理现象或生物体的交互行为。 元启发式优化算法可以通过最小化或最大化目标函数来解决复杂的优化问题并搜索一组相关参数值[27]。一系列元启发式算法已被用于解决路径规划问题。例如,参考文献[28]提出了一种新颖的多频振动遗传算法(mVGA)来解决无人机路径规划问题。 参考文献 [29]将无人机路径规划问题表述为扩展旅行推销员问题(TSP),并开发了一种增强的离散粒子群优化(DPSO)算法来解决这个问题。为解决无人作战飞行器(UCAV)路径规划问题,Ref. [30]. 参考文献[31]提出了一种改进的差分进化(DE)方法,以获得解决无人机全球路线规划问题的可行路线。参考文献[32]提出了一种社会类鸽子启发算法来解决多无人机路径规划问题,并建立了时间戳分割路径规划模型,以简化多无人机协调成本的处理。为了执行无人机群的侦察任务,参考。 [33]提出了各种分布式粒子群优化路径规划算法。
灰狼优化器(GWO)算法是一种新的元启发式算法,由Mirjalili等人于2014年提出。该算法模仿了灰狼的狩猎行为和社会领导力,这赋予了它强大的探索能力[34]。与其他元启发式算法相比,GWO具有灵活性、简单性和实现性等优点。作为一种高效且有竞争力的优化算法,GWO已被应用于解决许多工程应用和控制问题,如经济负荷调度问题[35],PID控制器设计[36],多跟踪目标[37],广域电力系统稳定器设计[38].共生生物搜索(SOS)算法最初由Cheng和Prayogo[39]于2014年开发,基于生态系统中生物之间的共生相互作用。在SOS中,后代可以通过当前生物体与其他随机生物体或当前生态系统中最好的生物体之间的共生行为产生,并且这种方法具有很强的开发能力[40]。SOS算法因其没有调谐参数且易于实现的特点而被广泛采用[41]。
近年来,研究人员转向一种称为杂交的新技术[42],[43],它是多种元启发式算法的组合,用于优化。在这种技术中,熟练的组合在处理实际问题时可以显示出更有效的优化[44]。为了解决多机器人路径规划问题,Ref. [45]改进了粒子群优化(PSO)和引力搜索算法(GSA),并提出了一种名为IPSO-IGSA的新型混合算法。 [46]提出了两种基于鲸鱼优化算法(WOA)的杂交方法来设计不同的特征选择问题。提出了一种基于混合教学学习的PSO算法,以在Ref中获得很大的收敛性。 [47]. 参考文献 [48] 开发了一种新颖的混合 PSO-GWO 方法来解决单位承诺问题。将所提方法的有效性与各种经典算法进行了比较。
此外,收敛分析对于元启发式算法证明其稳定性具有重要意义。 参考资料 [49]通过结合粒子群优化(PSO)、遗传算法(GA)和SOS等三种经典算法,提出了一种新的混合算法。通过数学归纳,证明了所提算法的修正互利阶段可以创建更好的收敛性。裁判。 [50]开发了一种改进的引力搜索算法(IGSA)来解决优化问题。他们使用离散时间线性系统理论来证明IGSA的稳定性。参考文献[51]提出了一种改进的中心力优化(MCFO)算法,并引入了线性差分方程的方法,以完成所提算法的收敛性分析。然而,GWO及其混合算法的收敛性分析在目前的研究中很少。
元启发式算法需要在勘探操作和开发操作之间取得良好的平衡,以便有效地实现全局和本地搜索。GWO算法的优化模式具有较大的开发能力。相比之下,SOS 算法具有本地开发能力。同时,GWO 和 SOS 算法都显示了与其他元启发式算法混合时提高性能的可能性。因此,我们结合狼和生物的探索和开发能力,提出了一种新的混合优化算法HSGWO-MSOS算法。利用所提算法离线计算无人机最优路径,并用三次B样条曲线进行平滑处理。本文的主要创新总结如下:
- •
该文提出一种由简化GWO阶段和修正SOS相位组成的新型混合算法HSGWO-MSOS。
- •
受线性差分方程启发的收敛分析已经针对所提算法完成。
- •
HSGWO-MSOS算法已应用于无人机路径规划问题,与其他经典算法相比,所提算法获得了更好的实验结果。
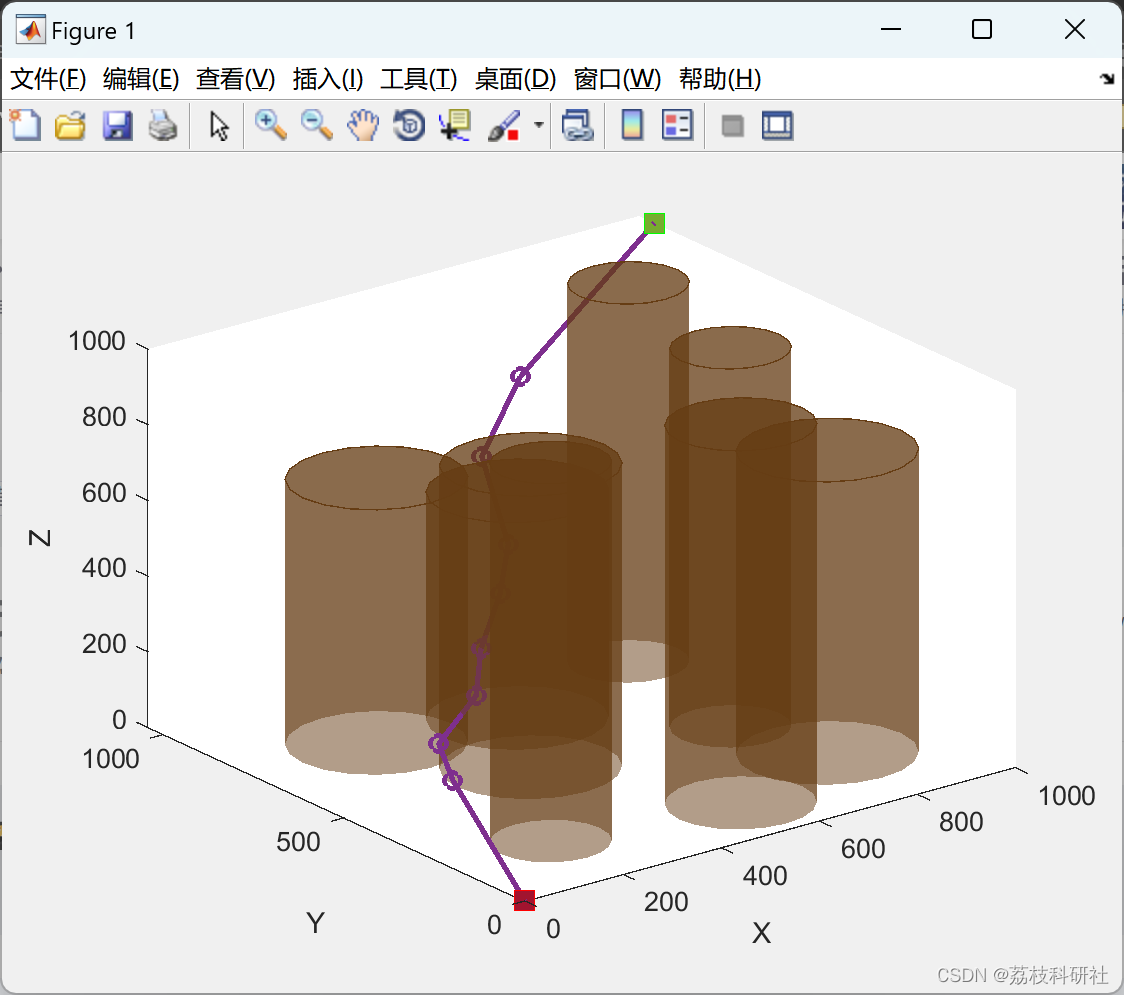
📚2 运行结果
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











