







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
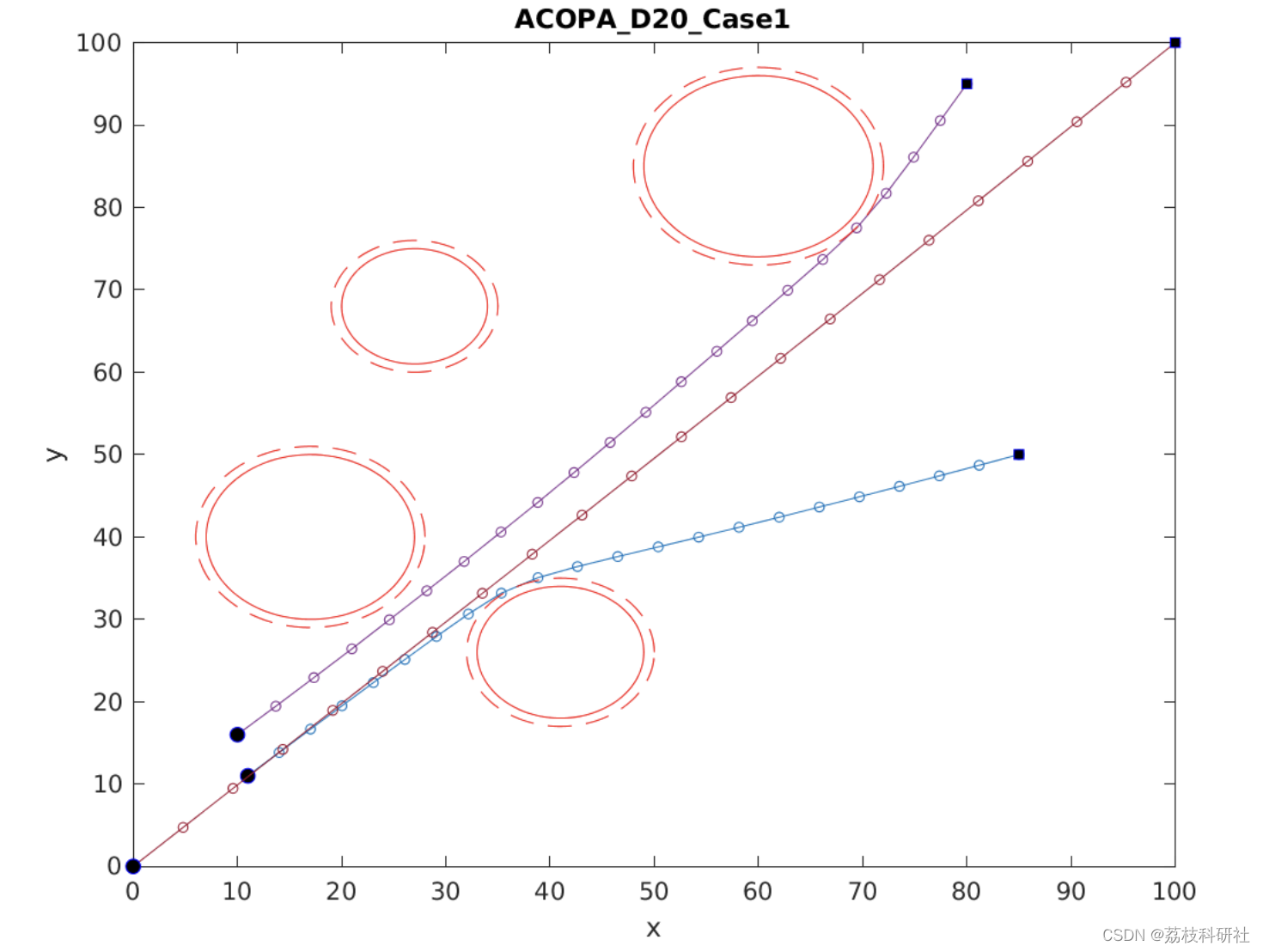
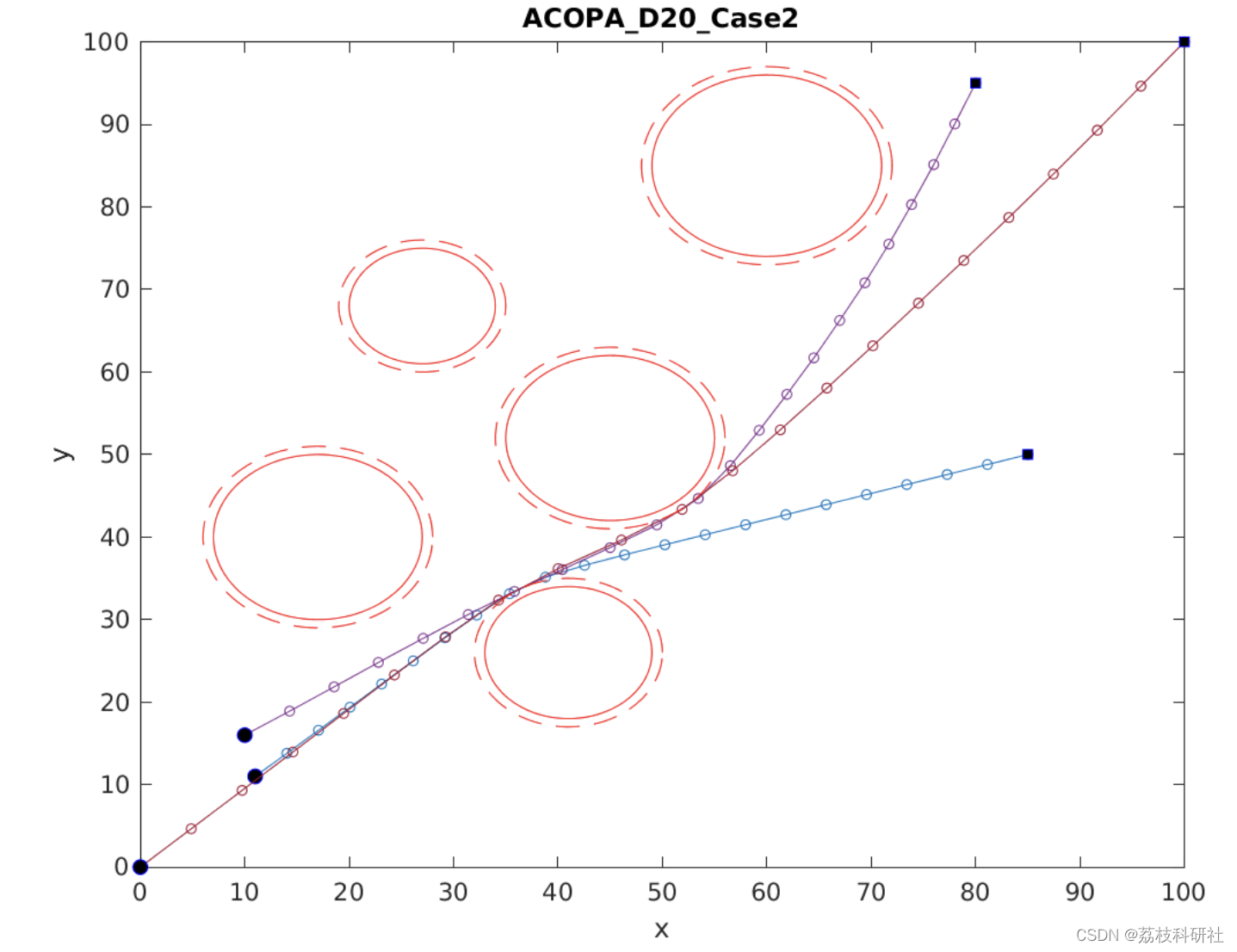
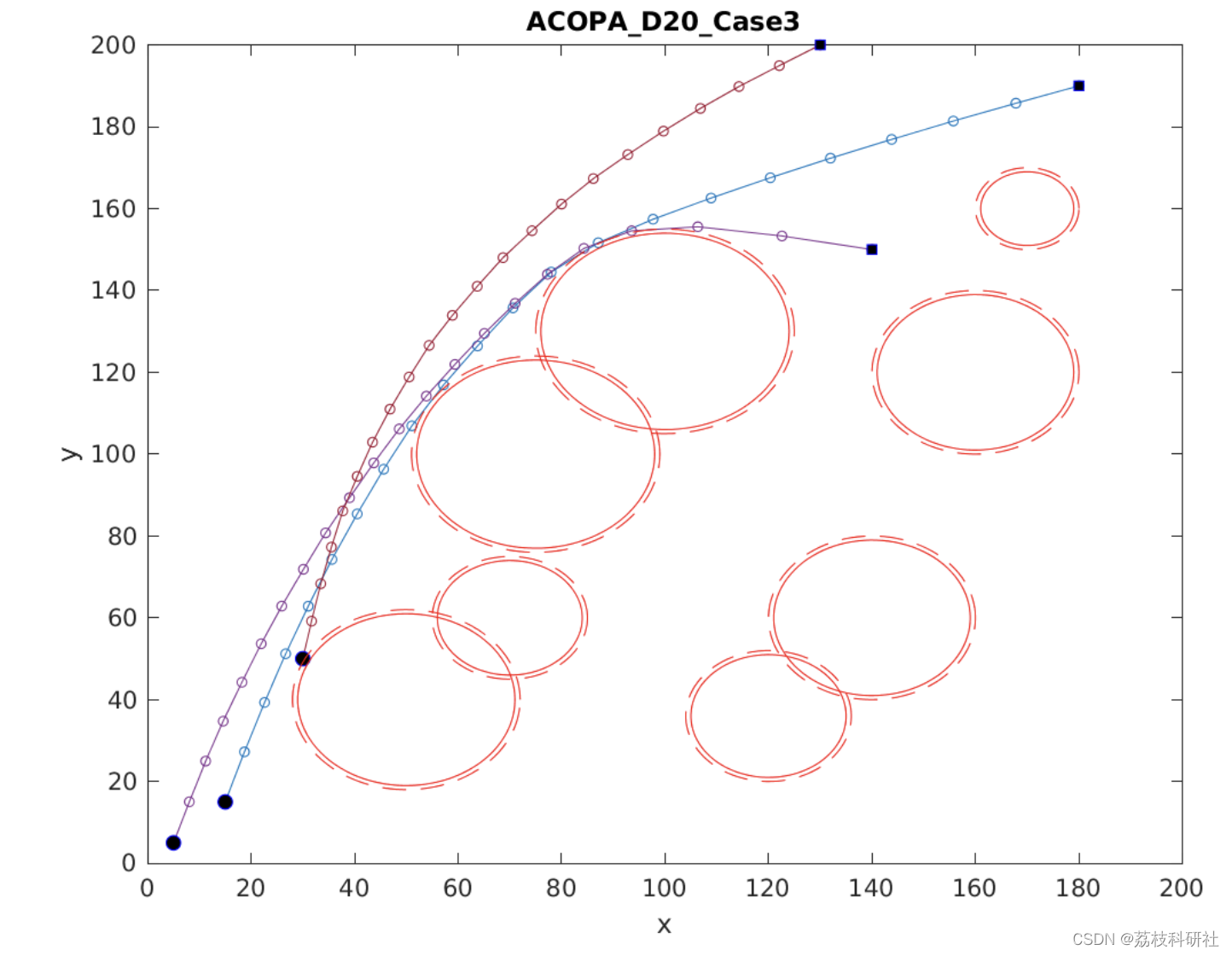
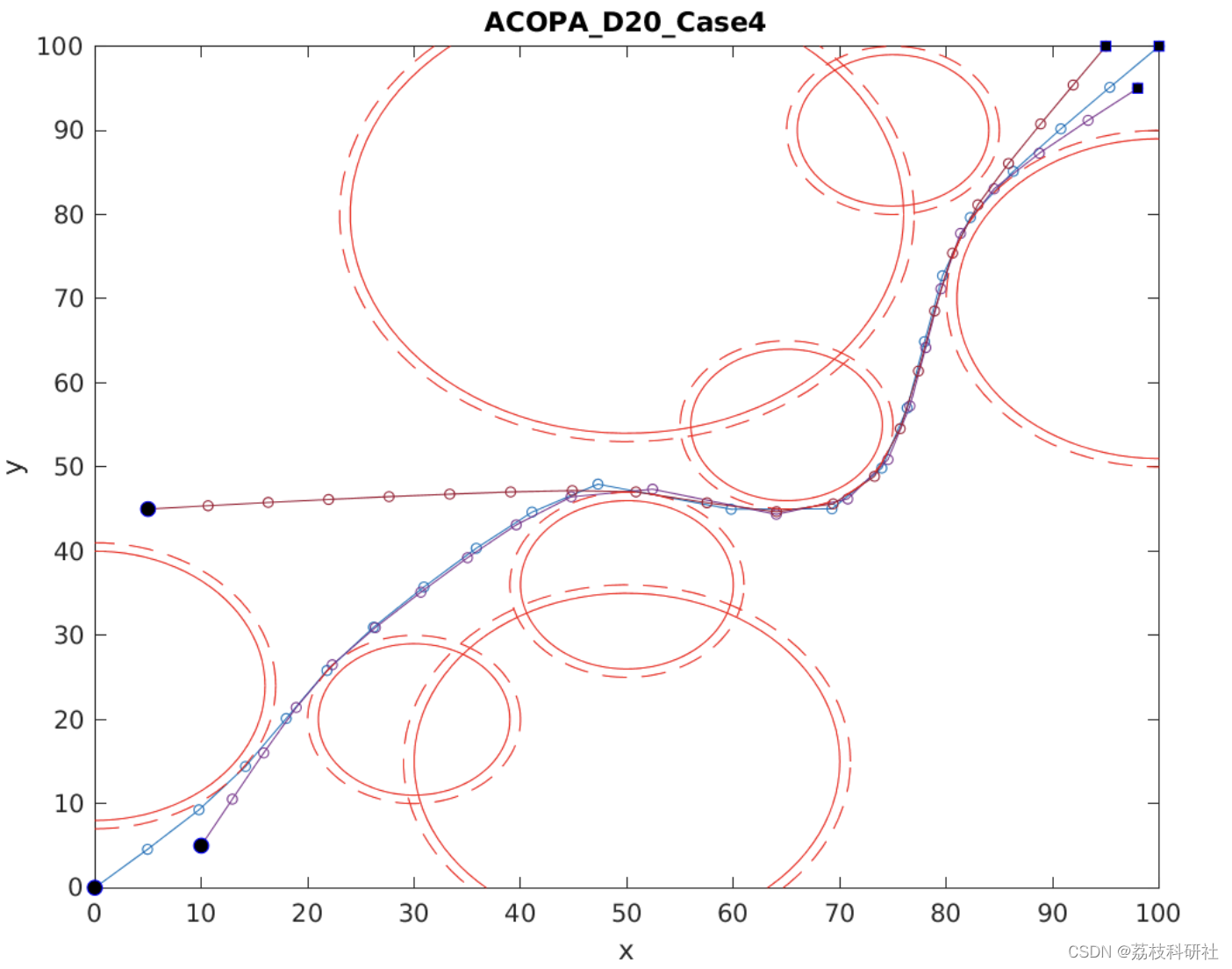
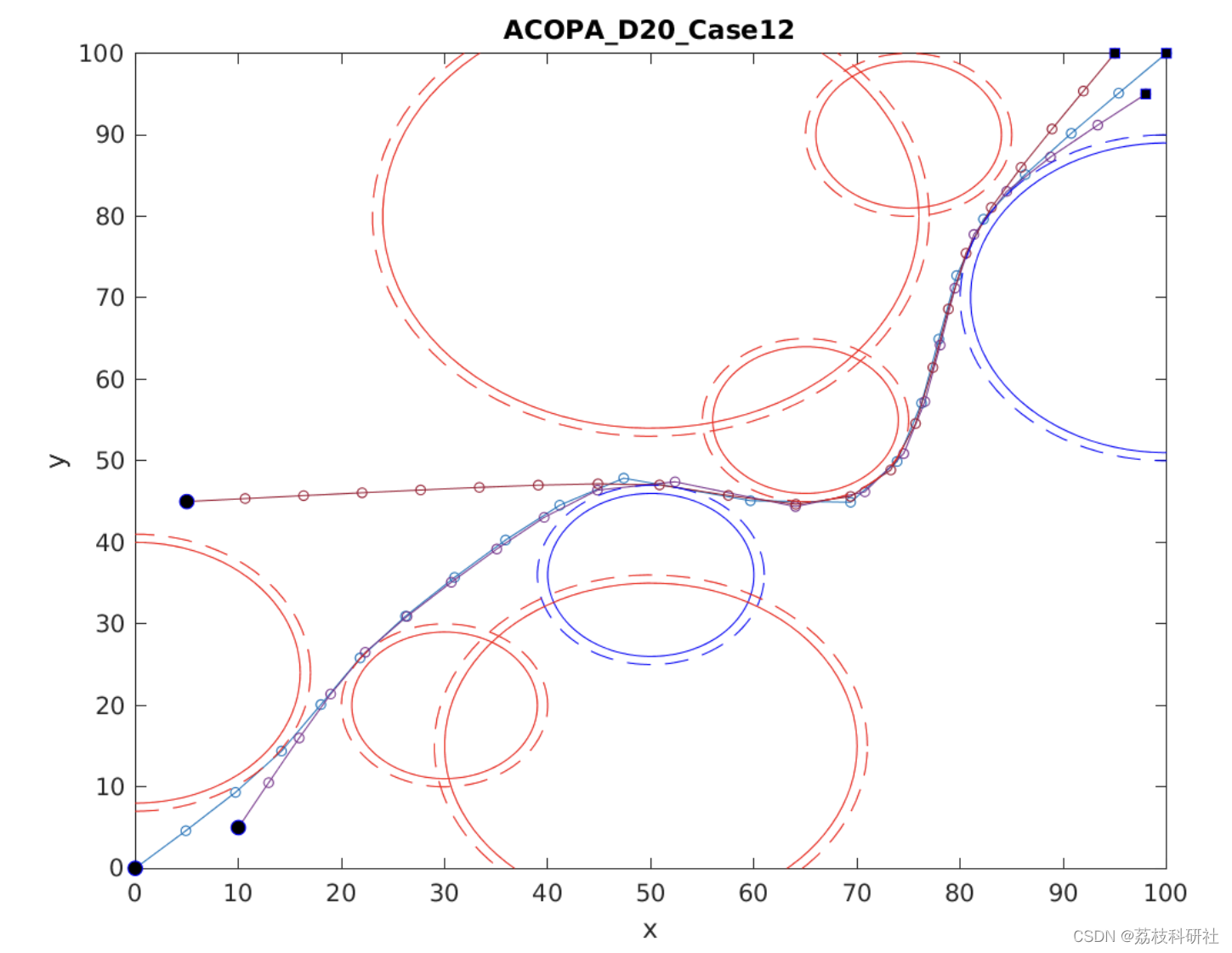
本文提出了一种基于蚁群的连续多UGV路径规划,该规划器由UGV路径规划和多UGV协调组成。该文提出一种基于概率的随机游走策略和自适应航点修复机制的连续蚁群优化,以优化每个UGV的路径。然后通过速度偏移优化算法解决多智能体协调问题UGV之间的碰撞避免问题。
📚2 运行结果
部分代码:
% ParticleSwarm: (Dimension, SwarmSize)
function FitValue=SingleCostFunction(ParticleSwarm, ModelInfor, AgentIndex)
%AgentIndex=1;
%flag_collisionUAV=0; % 0 do not calculate the collision among UAVs; 1 otherwise
flag_threat=0; % one way to calculate it
[Dimension, SwarmSize]=size(ParticleSwarm); % Dimension is the number of waypoints
X=ModelInfor.x; % Dimension, AgentNumber
[~, AgentNumber]=size(X);
if AgentNumber==1 % means the coordinate system has been transformed for each agent
AgentIndex=1;
end
Y=ModelInfor.y; % Dimension, AgentNumber, the y axis of waypoints of all agents
SX=X(:,AgentIndex);
Threat=ModelInfor.Threat;
Obstacle=ModelInfor.Obstacle;
Task=ModelInfor.Task;
Penalty=3;
%TimeSafe=0.1;
%Velocity=10;
%d_safe=1;
if Task(5)<=100
MaximumLength=300;
else
MaximumLength=500;
end
StartPoint=Task(AgentIndex,1:2);
TargetPoint=Task(AgentIndex,3:4);
ST=dist(StartPoint, TargetPoint'); % the length of the straight line connencting the starting point and the target point
for i=1: SwarmSize
SY=ParticleSwarm(:, i);
if ~isreal (SY)
SY=real(SY);
%FitValue(i)=nan;
%break;
end
Waypoints=[SX SY];
Path=[StartPoint; SX SY; TargetPoint]; % (D+2,2) the path of the UAV
%% Calculate the cost associated with the total length \in [0,1]
d=Path(2:Dimension+2,:)-Path(1:Dimension+1,:);
PathLength=sum((sum(d.*d,2)).^0.5);
CLength=1-(ST/PathLength);
%% Calculate the cost associated with turning \in [0,1]
for ii=2:Dimension+1
%Theta=d(ii,:)*d(ii-1,:)'/(d(ii,:)*d(ii,:)'^0.5)*((d(ii,:)*d(ii,:)'^0.5));
turning(ii-1)=dot(d(ii,:),d(ii-1,:))/(norm(d(ii,:))*norm(d(ii-1,:)));
end
CTurning=(1-mean(turning))/2;
%% Calculate the cost associated with the threats \in [0,1]
if ~isempty (Threat)
[n, ~]=size(Threat); % n: the number of Threats
dThreat=pdist2(Path, Threat(:,1:2)); %dd(i,j) is the distance between i (D+2) point and j Threat
dDanger=0;
for j=1:n % for each Threat
for k=2:Dimension+2 % for each point. Note: the start point is collision free
x1=Path(k-1,1); y1=Path(k-1,2);
x2=Path(k,1); y2=Path(k,2);
x3=Threat(j,1);y3=Threat(j,2);r=Threat(j,3);
A=(x2-x1)^2+(y2-y1)^2; %A>0
B=2*((x2-x1)*(x1-x3)+(y2-y1)*(y1-y3));
C=x3^2+y3^2+x1^2+y1^2-2*(x3*x1+y3*y1)-r^2;
delta=B^2-4*A*C;
if delta<=0 %&& dThreat(k,j)>=Threat(j,3)
% do nothing, no intersection
else
mu1=(-B+delta^0.5)/(2*A); mu2=(-B-delta^0.5)/(2*A); % mu2<mu1
x_int1=x1+mu1*(x2-x1); y_int1= y1+mu1*(y2-y1); % the point of intersection
x_int2=x1+mu2*(x2-x1); y_int2= y1+mu2*(y2-y1);
if dThreat(k,j)>=Threat(j,3) % x2 the point is outside the Threat
if dThreat(k-1,j)>=Threat(j,3)
if (mu1<1 && mu1>0 ) && (mu2<1 && mu2>0)
d=((x_int1-x_int2)^2+(y_int1-y_int2)^2)^0.5;
dDanger=dDanger+d;
else
% do nothing
end
else
d=((x1-x_int1)^2+(y1-y_int1)^2)^0.5;
dDanger=dDanger+d;
end
else
if dThreat(k-1,j)>=Threat(j,3)
d=((x2-x_int2)^2+(y2-y_int2)^2)^0.5;
dDanger=dDanger+d;
else
d=A^0.5;
dDanger=dDanger+d;
end
end
end
end
end
if dDanger>0
CDanger=dDanger/PathLength;
else
CDanger=0;
end
if CDanger>1
CDanger=1;
end
else
CDanger=0;
end
%% Another way to calculate the cost associated with the threats \in [0,1]
if flag_threat==1
if ~isempty (Threat)
[m, ~]=size(Threat); % m: the number of threats
dThreat=pdist2(Path, Threat(:,1:2)); % dThreat(i,j) is the distance between i (D+2) point and j threat
for j=1:m % for each threat
for k=2:Dimension+2 % for each point/line segment
if dThreat(k,j)<=Threat(j,3)
if dThreat(k-1,j)<=Threat(j,3) % the segment is in the circle
TS(k)=norm(Path(k,:)-Path(k-1,:));
else % intersect
x1=Path(k-1,1); y1=Path(k-1,2);
x2=Path(k,1); y2=Path(k,2);
x3=Threat(j,1);y3=Threat(j,2);r=Threat(j,3);
A=(x2-x1)^2+(y2-y1)^2;
B=2*((x2-x1)*(x1-x3)+(y2-y1)*(y1-y3));
C=x3^2+y3^2+x1^2+y1^2-2*(x3*x1+y3*y1)-r^2;
delta=B^2-4*A*C;
mu1=(-B+delta^0.5)/(2*A); mu2=(-B-delta^0.5)/(2*A);
if 0<=mu1&& mu1<=1
TS(k)=norm(Path(k,:)-Path(k-1,:))*(1-mu1);
else
if 0<=mu2 && mu2<=1
TS(k)=norm(Path(k,:)-Path(k-1,:))*(1-mu2);
else
TS(k)=0;
end
end
end
else
if dThreat(k-1,j)<=Threat(j,3) % intersect
x1=Path(k-1,1); y1=Path(k-1,2);
x2=Path(k,1); y2=Path(k,2);
x3=Threat(j,1);y3=Threat(j,2);r=Threat(j,3);
A=(x2-x1)^2+(y2-y1)^2;
B=2*((x2-x1)*(x1-x3)+(y2-y1)*(y1-y3));
C=x3^2+y3^2+x1^2+y1^2-2*(x3*x1+y3*y1)-r^2;
delta=B^2-4*A*C;
mu1=(-B+delta^0.5)/(2*A); mu2=(-B-delta^0.5)/(2*A);
if 0<=mu1&& mu1<=1
TS(k)=norm(Path(k,:)-Path(k-1,:))*mu1;
else
if 0<=mu2 && mu2<=1
TS(k)=norm(Path(k,:)-Path(k-1,:))*mu2;
else
TS(k)=0;
end
end
else
x1=Path(k-1,1); y1=Path(k-1,2);
x2=Path(k,1); y2=Path(k,2);
x3=Threat(j,1);y3=Threat(j,2);r=Threat(j,3);
A=(x2-x1)^2+(y2-y1)^2;
B=2*((x2-x1)*(x1-x3)+(y2-y1)*(y1-y3));
C=x3^2+y3^2+x1^2+y1^2-2*(x3*x1+y3*y1)-r^2;
delta=B^2-4*A*C;
if delta<=0 % no intersection
TS(k)=0;
else % two intersections
mu1=(-B+delta^0.5)/(2*A); mu2=(-B-delta^0.5)/(2*A);
TS(k)=norm(Path(k,:)-Path(k-1,:))*(mu1-mu2);
end
end
end
end
end
CDanger=sum(TS)/sum(Threat(:,3));
if CDanger>1
CDanger=1;
end
else
CDanger=0;
end
end
%% Calculate the cost associated with the collision with obstacles \in [p,p+1]
[n, ~]=size(Obstacle); % n: the number of obstacles
dObstacle=pdist2(Path, Obstacle(:,1:2)); %dd(i,j) is the distance between i (D+2) point and j obstacle
dCollision=0;
for j=1:n % for each obstacle
for k=2:Dimension+2 % for each point. Note: the start point is collision free
%if dObstacle(k,j)<Obstacle(j,3)
% Collision=Collision+1;
%else
x1=Path(k-1,1); y1=Path(k-1,2);
x2=Path(k,1); y2=Path(k,2);
x3=Obstacle(j,1);y3=Obstacle(j,2);r=Obstacle(j,3);
A=(x2-x1)^2+(y2-y1)^2; %A>0
B=2*((x2-x1)*(x1-x3)+(y2-y1)*(y1-y3));
C=x3^2+y3^2+x1^2+y1^2-2*(x3*x1+y3*y1)-r^2;
delta=B^2-4*A*C;
if delta<=0 %&& dObstacle(k,j)>=Obstacle(j,3)
% do nothing, no intersection
else
mu1=(-B+delta^0.5)/(2*A); mu2=(-B-delta^0.5)/(2*A); % mu2<mu1
x_int1=x1+mu1*(x2-x1); y_int1= y1+mu1*(y2-y1); % the point of intersection
x_int2=x1+mu2*(x2-x1); y_int2= y1+mu2*(y2-y1);
if dObstacle(k,j)>=Obstacle(j,3) % x2 the point is outside the obstacle
if dObstacle(k-1,j)>=Obstacle(j,3)
if (mu1<1 && mu1>0 ) && (mu2<1 && mu2>0)
d=((x_int1-x_int2)^2+(y_int1-y_int2)^2)^0.5;
dCollision=dCollision+d;
else
% do nothing
end
else
d=((x1-x_int1)^2+(y1-y_int1)^2)^0.5;
dCollision=dCollision+d;
end
else
if dObstacle(k-1,j)>=Obstacle(j,3)
d=((x2-x_int2)^2+(y2-y_int2)^2)^0.5;
dCollision=dCollision+d;
else
d=A^0.5;
dCollision=dCollision+d;
end
end
end
end
end
if dCollision>0
CCollision=Penalty*(1+dCollision); %/PathLength; !!!!
else
CCollision=0;
end
%% Calculate the cost associated with the fuel represented by fly length \in [p,p+1]
if PathLength<=MaximumLength
CFuel=0;
else
CFuel=Penalty+(PathLength-MaximumLength)/MaximumLength;
end
FitValue(i)=CLength+CDanger+CTurning+ CCollision+CFuel;
end
end
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Jing Liu, Sreenatha Anavatti, Matthew Garratt, Hussein A. Abbass (2022) Modified Continuous Ant Colony Optimisation for Multiple Unmanned Ground Vehicle Path Planning
[2]霍志会. 基于强化学习的UGV在复杂环境下的路径探索关键技术研究[D].浙江科技学院,2022.DOI:10.27840/d.cnki.gzjkj.2022.000299.
















 1538
1538











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











