






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
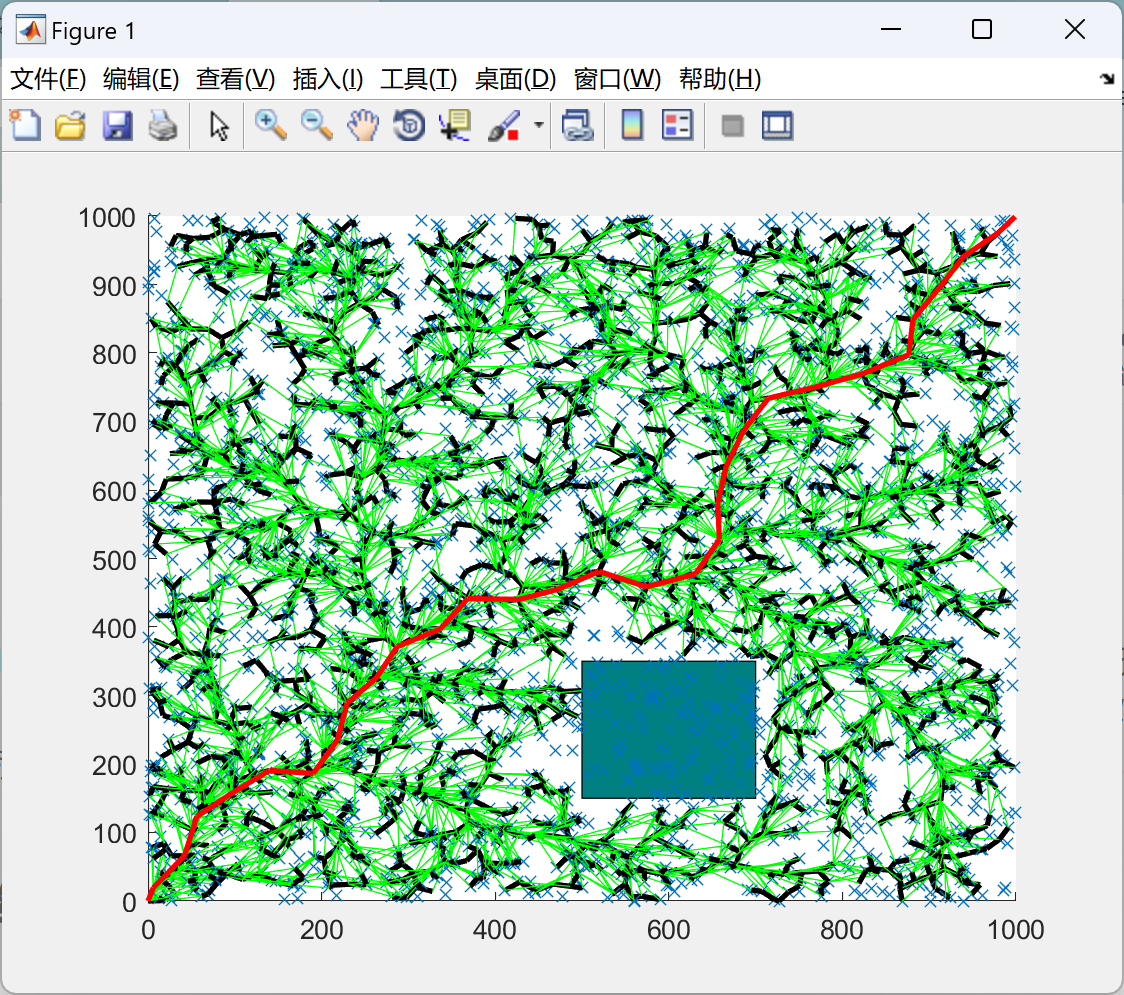
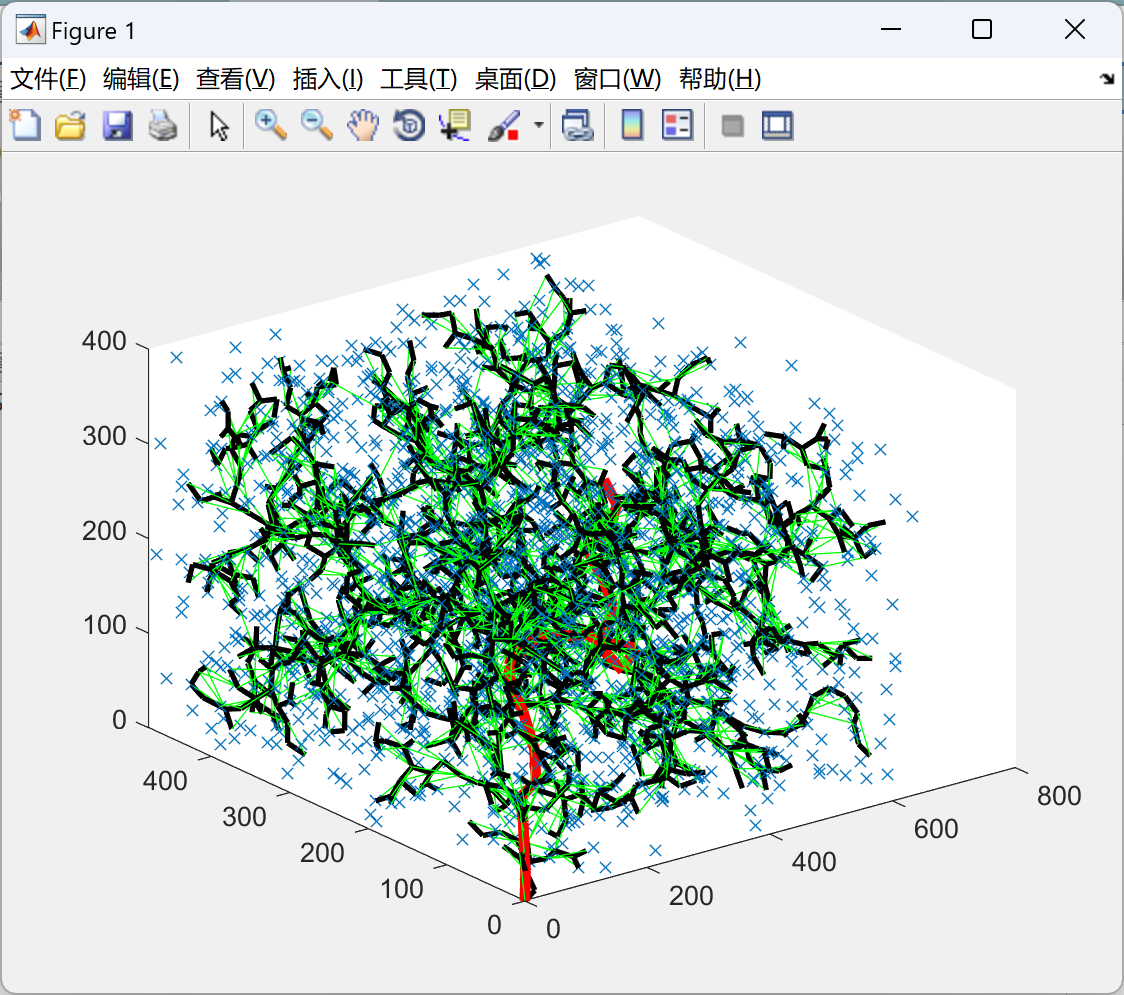
RRT*(Rapidly-exploring Random Tree Star)算法是一种在机器人领域广泛应用的路径规划算法,适用于二维和三维空间。与传统的RRT算法相比,RRT*采用增量式搜索策略,通过逐步探索状态空间并不断改善路径质量,具有较高的效率和性能。这种算法具有渐近最优性和适应复杂环境的特点,可以在不断优化树结构和重新连接的过程中,随着时间的推移收敛到全局最优解。RRT*算法的独特之处在于能够在保持搜索效率的同时,提供更接近最优解的路径规划结果,使得机器人能够在复杂的环境中更有效地规划路径并完成任务。其在自主导航、无人车辆、机械臂控制等领域具有广泛的应用前景。
📚2 运行结果
主函数部分代码:
clearvars
close all
x_max = 640;
y_max = 480;
z_max = 400;
EPS = 20;
numNodes = 2000;
q_start.coord = [0 0 0];
q_start.cost = 0;
q_start.parent = 0;
q_goal.coord = [640 400 180];
q_goal.cost = 0;
nodes(1) = q_start;
figure(1)
for i = 1:1:numNodes
q_rand = [rand(1)*x_max rand(1)*y_max rand(1)*z_max];
plot3(q_rand(1), q_rand(2), q_rand(3), 'x', 'Color', [0 0.4470 0.7410])
% Break if goal node is already reached
for j = 1:1:length(nodes)
if nodes(j).coord == q_goal.coord
break
end
end
% Pick the closest node from existing list to branch out from
ndist = [];
for j = 1:1:length(nodes)
n = nodes(j);
tmp = dist_3d(n.coord, q_rand);
ndist = [ndist tmp];
end
[val, idx] = min(ndist);
q_near = nodes(idx);
q_new.coord = steer3d(q_rand, q_near.coord, val, EPS);
line([q_near.coord(1), q_new.coord(1)], [q_near.coord(2), q_new.coord(2)], [q_near.coord(3), q_new.coord(3)], 'Color', 'k', 'LineWidth', 2);
drawnow
hold on
q_new.cost = dist_3d(q_new.coord, q_near.coord) + q_near.cost;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[[1]付留芳,周明,李文哲等.基于遗传算法的UUV应召搜潜路径规划[J/OL].电光与控制:1-9[2024-03-20].http://kns.cnki.net/kcms/detail/41.1227.tn.20240311.1942.014.html.

















 1049
1049











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











