






👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
基于图像传感器的无人机最小时间覆盖问题研究
摘要:该文提出一种使用一组配备图像传感器的无人驾驶飞行器(UAV)对地面区域进行最小时间覆盖问题的解决方案。该解决方案分为两部分:(i)任务建模为一个图形,其顶点是地理坐标,以确定的方式是单个无人机将在最短的时间内覆盖该区域;(ii)混合整数线性规划问题的解,根据第一部分中定义的图变量制定,以在该区域上空路由无人机团队。与传统车辆路径问题(VRP)解决方案相比,所提方法的主要贡献在于,我们的方法解决了实际无人机执行任务时遇到的一些实际问题。在这一行中,论文的主要贡献之一是通过求解优化问题自动选择用于覆盖该区域的无人机数量。无人机的数量受车辆的最大飞行时间和设置时间的影响,设置时间是准备和发射无人机所需的时间。为了说明该方法,本文介绍了使用两架手动发射的固定翼无人机获得的实验结果。
空间覆盖范围与点分布在该区域上的事实有关,而时间覆盖范围与确定何时必须覆盖点的时间限制有关。环境是动态的,因为目标在空间和时间上都在演变。同时考虑三个相互冲突的目标:(一) 尽量减少行进距离;(二) 最大限度提高满意度,模拟在给定时间窗口内实现目标的必要性;以及(iii)尽量减少无人机的数量。具有多个站点的车辆配送问题是 [18] 中使用的模型。在VRP命名法中,仓库是车辆开始和完成任务的地方。[18]中的目标是最小化每架无人机执行的最长行程,这相当于最小化总任务时间。
本文提出了一种使用多个固定翼无人机对地面区域进行最佳时间覆盖的方法。与其他工作类似,我们通过创建图表并将原始问题转换为车辆路径问题来解决覆盖问题。这项工作的主要贡献是合并了与实际部署相关的特定功能。我们假设一种常见情况,即负责发射和检索无人机的人类操作员数量少于车辆数量。通过定义所谓的设置时间,将其合并到方法中。在某些情况下,设置时间会阻止两架无人机在短时间内发射。这意味着,由于一个操作员不能同时准备多架无人机,因此每架无人机的设置时间是累积的。例如,考虑一个任务,其中一名操作员、两架无人机和设置时间4最小值第一架无人机的飞行前任务将采取4分钟和将采取8第二架无人机的最小值,4其中操作员正在第一架无人机上工作,而第二架无人机处于空闲状态。我们的方法会自动根据可用的人类操作员数量找到最佳路线和必要无人机的数量。鉴于对操作员数量的限制,在某些情况下,由于累积设置时间的影响,发射大量无人机可能会对总任务时间产生负面影响。此外,为了减少任务期间的转弯次数,我们还优化了扫描方向,我们在两个实际飞行器的真实实验中评估了该方法。
一、问题定义与核心挑战
最小时间覆盖问题要求无人机(UAV)在配备图像传感器的条件下,以最短时间完成对目标区域的全面扫描,同时需考虑动态环境、多机协同、传感器性能限制等因素。其核心挑战包括:
- 路径规划与动态控制:需设计满足无人机动力学约束的最优轨迹。
- 多机协同与任务分配:优化多无人机分工,避免重复覆盖与资源浪费。
- 传感器参数与覆盖效率:图像传感器性能直接影响拍摄频率、分辨率和数据处理速度。
- 实时避障与适应性:动态环境中需快速调整路径以规避障碍物。
二、覆盖控制基本原理与算法设计
1. 动态控制模型与轨迹优化
- 四旋翼无人机模型:基于PID控制器设计反馈控制系统,实现轨迹跟踪(MATLAB Simulink仿真验证)。
- 最优轨迹生成:通过参数化轨迹并结合优化算法(如线性规划、遗传算法)最小化覆盖时间,同时满足速度、加速度约束。
- 启发式算法应用:如加权目标扫描覆盖(WTSC)算法,考虑目标优先级和无人机性能约束,提升覆盖率与效率。
2. 多机协同任务分配
- 任务分配模型:采用车辆路径问题(VRP)、多旅行商问题(MTSP)等建模,结合改进粒子群算法(PSO)优化任务分配收益与飞行时间代价。
- 异构无人机协同:扩展CBBA算法,引入“资源-需求”矩阵和到达时间指标,处理不同机型的能力差异。
- 实时任务重分配:基于合同网络协议(CNP)应对突发情况(如无人机故障),牺牲部分最优性以保障任务连续性。
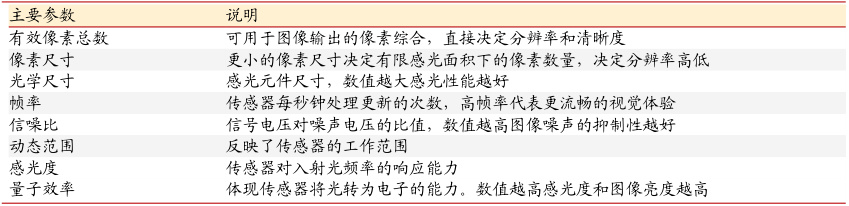
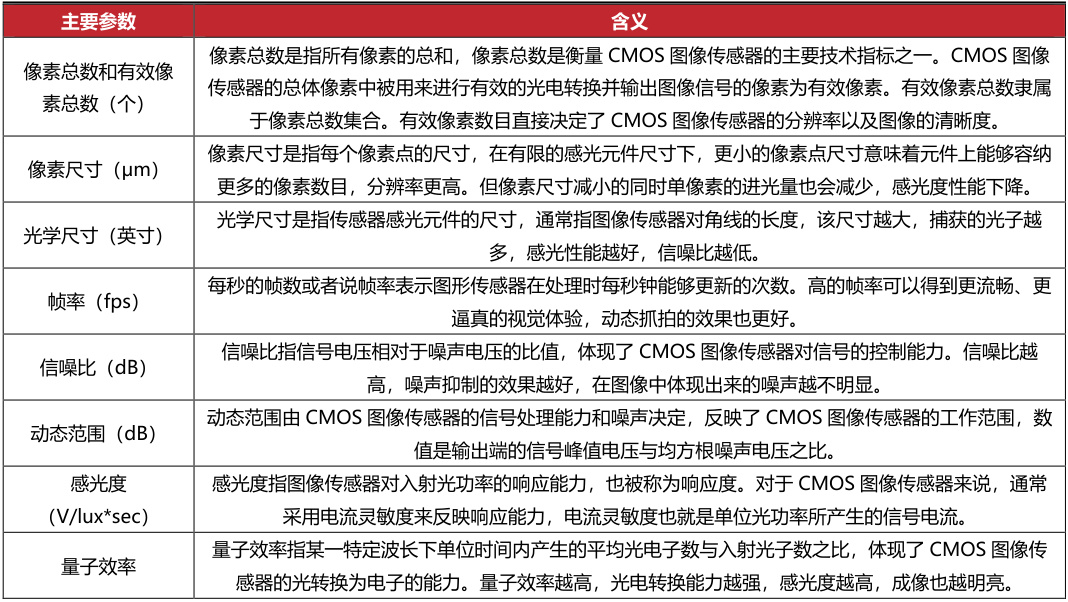
三、图像传感器参数对覆盖效率的影响
1. 关键性能参数分析
| 参数 | 影响维度 | 优化方向 |
|---|---|---|
| 分辨率 | 图像清晰度与覆盖精度 | 高分辨率减少重复拍摄需求 |
| 帧率(fps) | 拍摄频率与数据更新速度 | 高帧率缩短单次扫描时间 |
| 动态范围(dB) | 适应光照变化的场景鲁棒性 | 增强复杂光照条件下的可用性 |
| 量子效率(%) | 光电转换效率与低光性能 | 提升暗光环境覆盖能力 |
| 光学尺寸(英寸) | 感光面积与信噪比 | 大尺寸传感器减少噪声干扰 |
2. 传感器-路径联合优化
- 覆盖模式选择:全局快门适合高速运动场景(卷帘快门易产生运动模糊)。
- 数据压缩与传输:采用RAW格式减少处理延迟,优化MIPI接口传输效率。
- 能耗权衡:高分辨率传感器功耗增加,需平衡覆盖质量与任务时长。
四、最小时间覆盖的数学建模方法
1. 问题建模类型
- MTMC问题(最小时间最大覆盖):将区域离散化为网格,以时间最小化和覆盖率最大化为双目标优化。
- 动态规划方法:分阶段处理覆盖路径,时间复杂度为O∗(3n)O∗(3n),适用于小规模精确解。
- 整数规划与松弛:将顶点覆盖问题转换为二进制变量优化,结合线性规划松弛加速求解。
2. 典型算法对比
| 算法类型 | 优势 | 局限性 | 适用场景 |
|---|---|---|---|
| 启发式算法 | 计算效率高,适应大规模问题 | 可能陷入局部最优 | 动态环境实时规划 |
| 遗传算法 | 全局搜索能力强,支持多约束 | 参数调优复杂 | 复杂地形路径优化 |
| 蚁群优化 | 适应动态障碍,路径平滑性好 | 收敛速度慢 | 城市环境避障 |
五、典型地形条件下的路径规划案例
1. 城市环境
- Waypoint RRT算法:结合建筑物碰撞检测与无人机动力学约束,生成无碰撞航点路径。
- 改进ACO算法:通过坡度限制平滑和曲率约束,提升路径可执行性(上海紧急医疗配送案例)。
2. 山区与森林
- 模糊聚类分析:按火灾点分布分配无人机数量,结合PSO/GA算法优化路径。
- 地形曲率约束:限制飞行高度与坡度,避免地形威胁(三维路径规划仿真验证)。
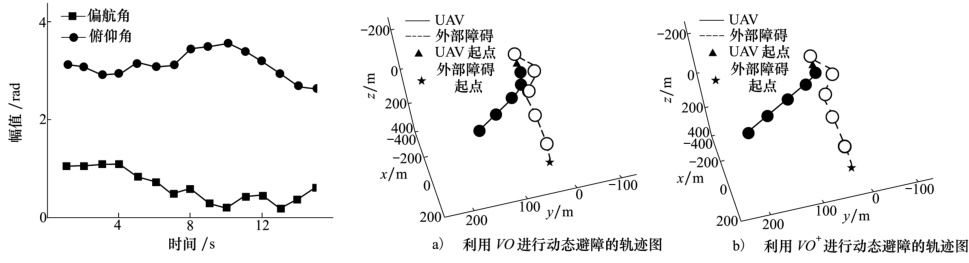
3. 动态障碍场景
- 扩展人工势场法(EAPF):结合深度Q网络(DQN)实时调整路径,解决传统势场法的局部最优问题。
- 速度障碍法(VO):预测障碍物运动轨迹,优化偏航角与俯仰角控制。
六、多无人机通信架构与数据融合
1. 通信架构设计
- FANET网络:基于Ad Hoc的自组织网络,支持动态拓扑变化(NS3仿真验证)。
- 分层式数据融合:局部节点预处理数据后上传,降低中心节点负载(联邦扩展卡尔曼滤波器案例)。
2. 协同优化策略
- TDMA/FDMA混合接入:平衡频谱效率与延迟,提升多机数据收集能力。
- 三维轨迹联合优化:最小化无人机移动能耗,同时保障IoT设备上行链路可靠性。
七、未来研究方向
- AI驱动的实时决策:结合强化学习实现动态环境下的在线路径规划。
- 异构传感器融合:集成LiDAR、红外与视觉数据,提升复杂场景感知能力。
- 能效优化模型:联合优化电池寿命、传感器功耗与覆盖效率的多目标模型。
- 大规模集群协同:探索基于群体智能的千架级无人机协同覆盖算法。
结论
最小时间覆盖问题需综合动态控制、多机协同、传感器优化与实时避障技术,通过数学模型与算法创新实现效率提升。未来发展方向将集中于智能化、自适应性和大规模协同,以满足复杂场景下的快速响应需求。
📚2 运行结果

部分代码:
function plotUavPath(waypoints)
%plotUavPath Summary of this function goes here
% Detailed explanation goes here
if length(waypoints) > 6
clr = prism(length(waypoints));
else
clr = [1 0 0;
0 1 0;
0 0 1;
1 1 0;
1 0 1;
0 1 1];
end
for k = 1:length(waypoints)
i = 1;
for i = 1:length(waypoints{k})
%pause(0.25);
plot(waypoints{k}(i,1),waypoints{k}(i,2),'o','Color',clr(k,:),...
'LineWidth',4,'MarkerSize',8,'MarkerFaceColor',clr(k,:))
if i > 1
plot(waypoints{k}(i-1:i,1),waypoints{k}(i-1:i,2),'Color',clr(k,:),...
'LineWidth',4);
end
end
end
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











