






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
基于HSV颜色空间的彩色区域检测研究
通过在HSV颜色空间中进行阈值处理来检测图像中的彩色区域,这个脚本演示了如何在图像中找到特定颜色的对象。在这个例子中,我使用的是标准洋葱、辣椒或孩子图像,但您也可以选择自己的彩色图像。然后我将图像分离成其组成的色调、饱和度和值颜色波段。接下来,我会询问您想要找到什么颜色(红色、绿色、黄色、白色等)。根据您的选择,我会计算相应的阈值,并最终找到您指定颜色区域的掩模。提示将逐步指导您完成演示,以确保您能够轻松地使用脚本来找到所需的颜色区域。最后,我将这个掩模与原始图像相乘,以显示只显示所请求的颜色的图像,其他部分都被涂黑,帮助您更清晰地观察到所需的颜色区域。
在图像处理中,使用HSV(色相、饱和度、值)颜色空间来进行阈值处理是一种常见的方法。HSV颜色空间将颜色表示为色相(H)、饱和度(S)和值(V)三个分量,可以更好地表示颜色的属性。
以下是使用HSV颜色空间进行阈值处理来检测图像中的彩色区域的一般步骤:
1. 将原始图像从RGB颜色空间转换为HSV颜色空间。这可以通过使用通用的颜色转换公式来实现。
2. 根据你想要检测的特定颜色,选择合适的HSV阈值。你可以通过手动尝试不同的阈值来找到最佳结果,或者根据颜色的特征进行自动计算。
- 色相(H):表示颜色在光谱上的位置。选择与你要检测的颜色相近的色相范围。
- 饱和度(S):表示颜色的纯度或强度。选择适当的饱和度范围,以过滤掉过于灰暗或过于鲜艳的颜色。
- 值(V):表示颜色的亮度。选择适当的亮度范围,以过滤掉太暗或太亮的颜色。
3. 使用选择的HSV阈值对图像进行阈值处理。将图像中符合阈值条件的像素设置为白色(或其他指定的颜色),而不符合阈值条件的像素设置为黑色(或其他指定的颜色)。
4. 可选择进行附加的形态学操作,如腐蚀(Erosion)和膨胀(Dilation),来进一步改善结果。这些操作有助于去除噪点或连接分离的彩色区域。
5. 在处理后的图像中,检测白色区域(彩色区域)的连通区域。可以使用图像处理算法(如连通区域标记)来找到和提取每个彩色区域的边界。
这只是一个一般的步骤示例,并不涵盖所有可能的情况。对于更具体的图像处理任务,你可能需要根据实际情况进行调整和改进。
一、HSV颜色空间的基本原理与特性
HSV(Hue, Saturation, Value)是一种基于人眼视觉感知的颜色模型,由色相(H)、饱和度(S)和明度(V)三个独立分量构成,其核心优势在于将亮度信息与颜色信息分离,从而提升对光照变化的鲁棒性。
-
分量定义:
- 色相(Hue) :表示颜色的基本属性,以角度值(0°-360°)覆盖红、橙、黄、绿、青、蓝、紫的连续色环,0°对应红色,120°对应绿色,240°对应蓝色。
- 饱和度(Saturation) :描述颜色纯度(0%-100%),值越高颜色越鲜艳,越低则越接近灰色。
- 明度(Value) :决定颜色的明暗程度(0%-100%),0%为纯黑,100%为最亮。
-
核心优势:
- 亮度分离:V分量独立于H和S,使得颜色处理不受光照强度干扰,适用于光照不均场景。
- 直观性:与人眼感知接近,便于手动或自动调整颜色阈值。
二、HSV阈值处理的技术实现
-
基本流程:
- 步骤1:颜色空间转换
将RGB图像转换为HSV空间,常用工具包括OpenCV的cv2.cvtColor()或Matlab的rgb2hsv()函数。
- 步骤2:阈值设定
根据目标颜色定义H、S、V的上下限。例如,红色区域H范围可设为[0°-10°]和[170°-180°],S>30%,V>20%。 - 步骤3:生成掩膜
使用cv2.inRange()函数根据阈值生成二值掩膜,目标区域为白色(255),背景为黑色(0)。 - 步骤4:后处理
形态学操作(腐蚀、膨胀)去除噪声,连通区域分析提取目标边界。 - 步骤5:结果融合
将掩膜与原图相乘,仅保留目标颜色区域。
- 步骤1:颜色空间转换
-
代码示例(基于OpenCV):
import cv2 import numpy as np # 转换至HSV空间 hsv_img = cv2.cvtColor(rgb_img, cv2.COLOR_BGR2HSV) # 定义红色阈值 lower_red = np.array([0, 50, 50]) upper_red = np.array([10, 255, 255]) mask = cv2.inRange(hsv_img, lower_red, upper_red) # 形态学处理 kernel = np.ones((5,5), np.uint8) mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, kernel) # 提取目标区域 result = cv2.bitwise_and(rgb_img, rgb_img, mask=mask)
三、算法研究现状与应用领域
-
典型应用案例:
- 交通标志检测:通过H和S通道阈值分割,结合形态学滤波与连通域分析,成功识别高饱和度标志。
- 农业检测:核桃污渍识别中,统计洁净表皮与污渍区域的V分量均值差异,设定自适应阈值实现分割。
- 射击靶面识别:HSV粗提取绿色靶面后,结合Otsu算法精细化处理,提升光照鲁棒性。
-
性能优化方向:
- 自适应阈值:利用统计方法(如MAD标准差)动态调整阈值,减少人工干预。
- 多算法融合:HSV与Otsu、CLAHE等结合,提升复杂光照下的分割精度。
四、HSV与其他颜色空间的对比分析
| 颜色空间 | 核心特点 | 适用场景 | 局限性 |
|---|---|---|---|
| RGB | 基于三原色叠加,设备相关 | 显示设备、基础图像处理 | 光照敏感,分量相关性高 |
| HSV | 亮度分离,符合人眼感知 | 光照不均、颜色分割 | 色域较窄,高光区易失真 |
| LAB | 色域广,设备无关 | 颜色校正、高精度检测 | 计算复杂度高,实时性差 |
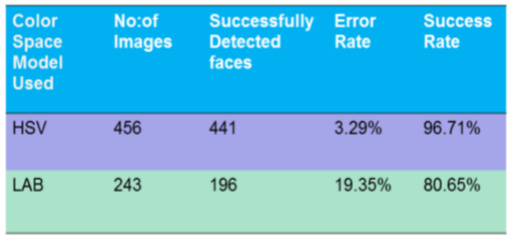
实验数据支持:HSV在人脸检测中的成功率(96.71%)显著高于LAB(80.65%),但在农业图像分割中LAB表现更优。
五、光照鲁棒性研究与优化策略
-
挑战与解决方案:
- 阴影干扰:通过动态阈值模型分析阴影程度,结合纹理特征减少误判。
- 高光区处理:舍弃V通道,仅依赖H和S进行颜色识别。
- 局部自适应:将图像分区域处理,光照均匀区用Otsu,复杂区用HSV。
-
增强技术:
- 直方图均衡化:在HSV空间提升对比度,便于后续分割。
- CLAHE增强:针对亮度通道进行限制对比度调整,减少过曝/欠曝影响。
六、结论与未来方向
-
优势总结:
- HSV在颜色分离和光照鲁棒性方面表现突出,尤其适用于工业检测、农业分拣等场景。
- 结合传统图像处理算法(如形态学、Otsu)可进一步提升精度。
-
未来研究方向:
- 智能阈值选择:基于机器学习或深度学习实现自适应阈值。
- 多模态融合:HSV与深度特征(如CNN)结合,提升复杂场景下的检测鲁棒性。
- 实时性优化:针对嵌入式设备开发轻量级HSV处理算法。
📚2 运行结果


部分代码:
maskedImageR = coloredObjectsMask .* rgbImage(:,:,1);
maskedImageG = coloredObjectsMask .* rgbImage(:,:,2);
maskedImageB = coloredObjectsMask .* rgbImage(:,:,3);
% Show the masked off red image.
subplot(3, 3, 4);
imshow(maskedImageR);
title('Masked Red Image', 'FontSize', fontSize);
% Show the masked off saturation image.
subplot(3, 3, 5);
imshow(maskedImageG);
title('Masked Green Image', 'FontSize', fontSize);
% Show the masked off value image.
subplot(3, 3, 6);
imshow(maskedImageB);
title('Masked Blue Image', 'FontSize', fontSize);
% Concatenate the masked color bands to form the rgb image.
maskedRGBImage = cat(3, maskedImageR, maskedImageG, maskedImageB);
% Show the masked off, original image.
subplot(3, 3, 8);
imshow(maskedRGBImage);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]刘瑞林,杨晨晖.HSV色彩空间中的多阈值车牌定位分割方法[J].福建电脑, 2008(1):14-14.DOI:10.3969/j.issn.1673-2782.2008.01.009.
[2]刘永波,雷波,胡亮,et al.机器视觉在HSV颜色空间下稻瘟病病程分级判定研究[J].农学学报, 2020, 10(10):8.DOI:10.11923/j.issn.2095-4050.cjas20190700108.



















 559
559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











