






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
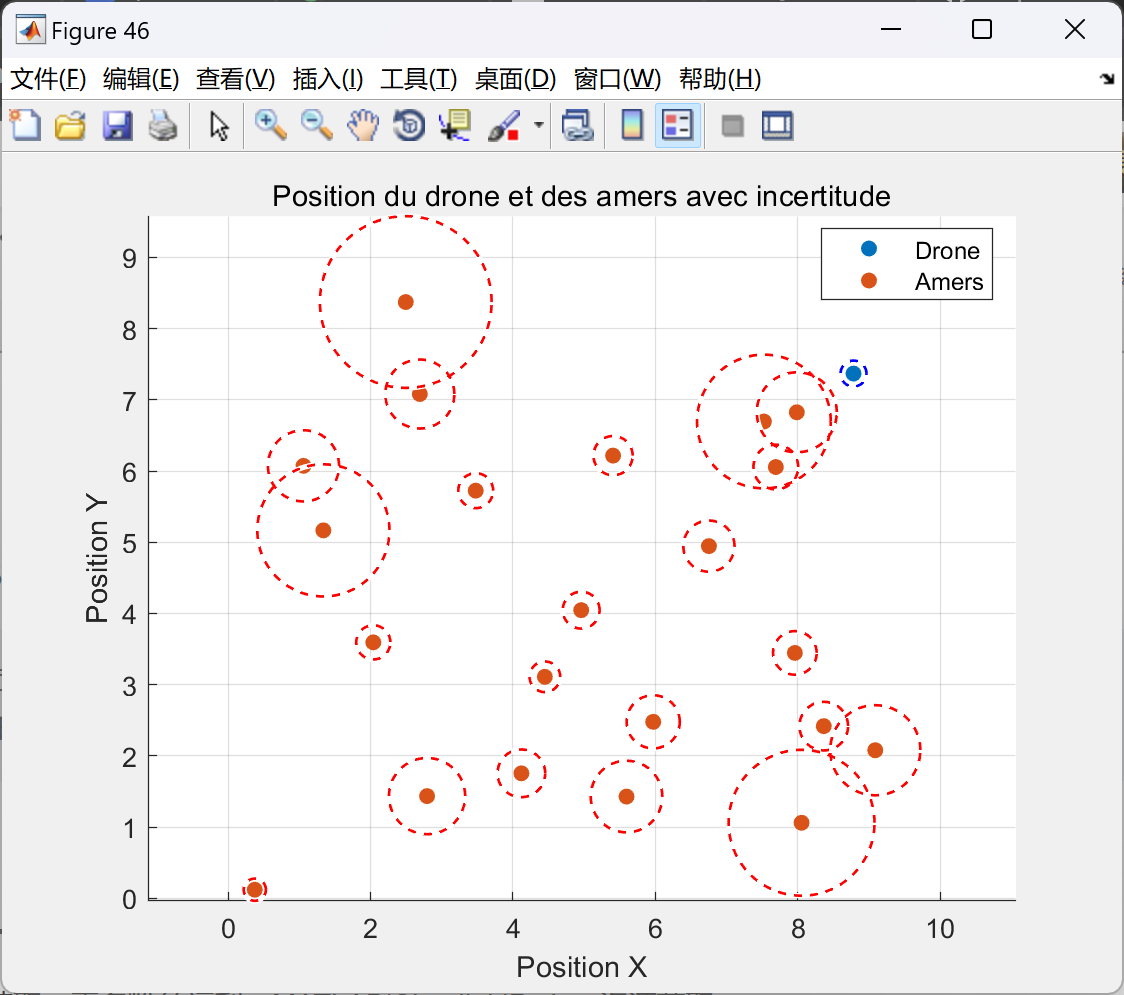
基于卡尔曼滤波与SLAM的二维地图绘制研究
一、卡尔曼滤波在SLAM中的基本原理与作用
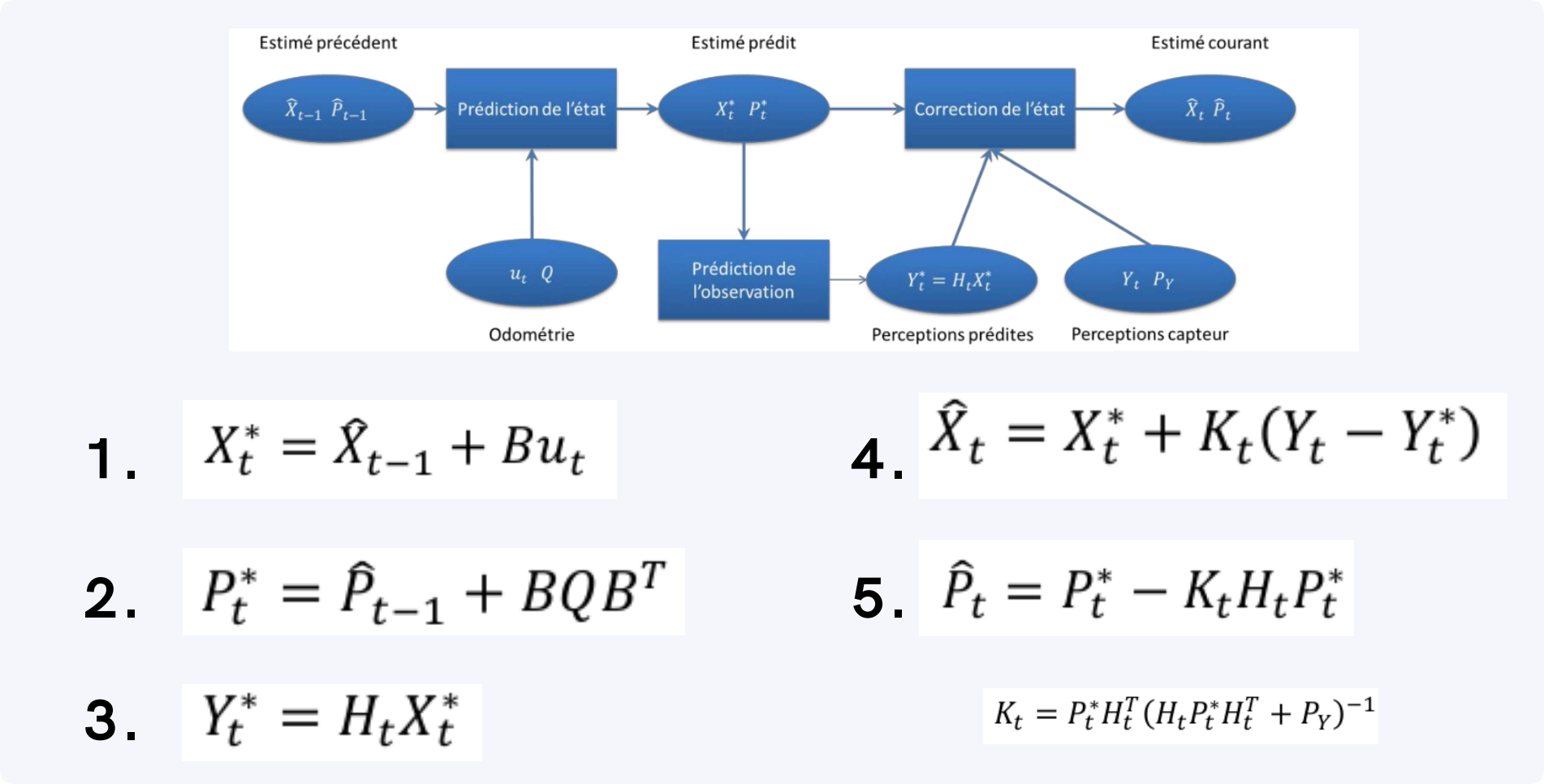
卡尔曼滤波(KF)是一种基于贝叶斯框架的递归状态估计算法,通过预测-更新两步骤处理线性高斯系统的噪声问题。在SLAM中,其核心作用包括:
- 状态估计:结合运动模型(预测)与传感器观测(更新),动态估计机器人位姿及环境特征的位置。KF通过卡尔曼增益动态调整预测与观测的权重,降低不确定性。
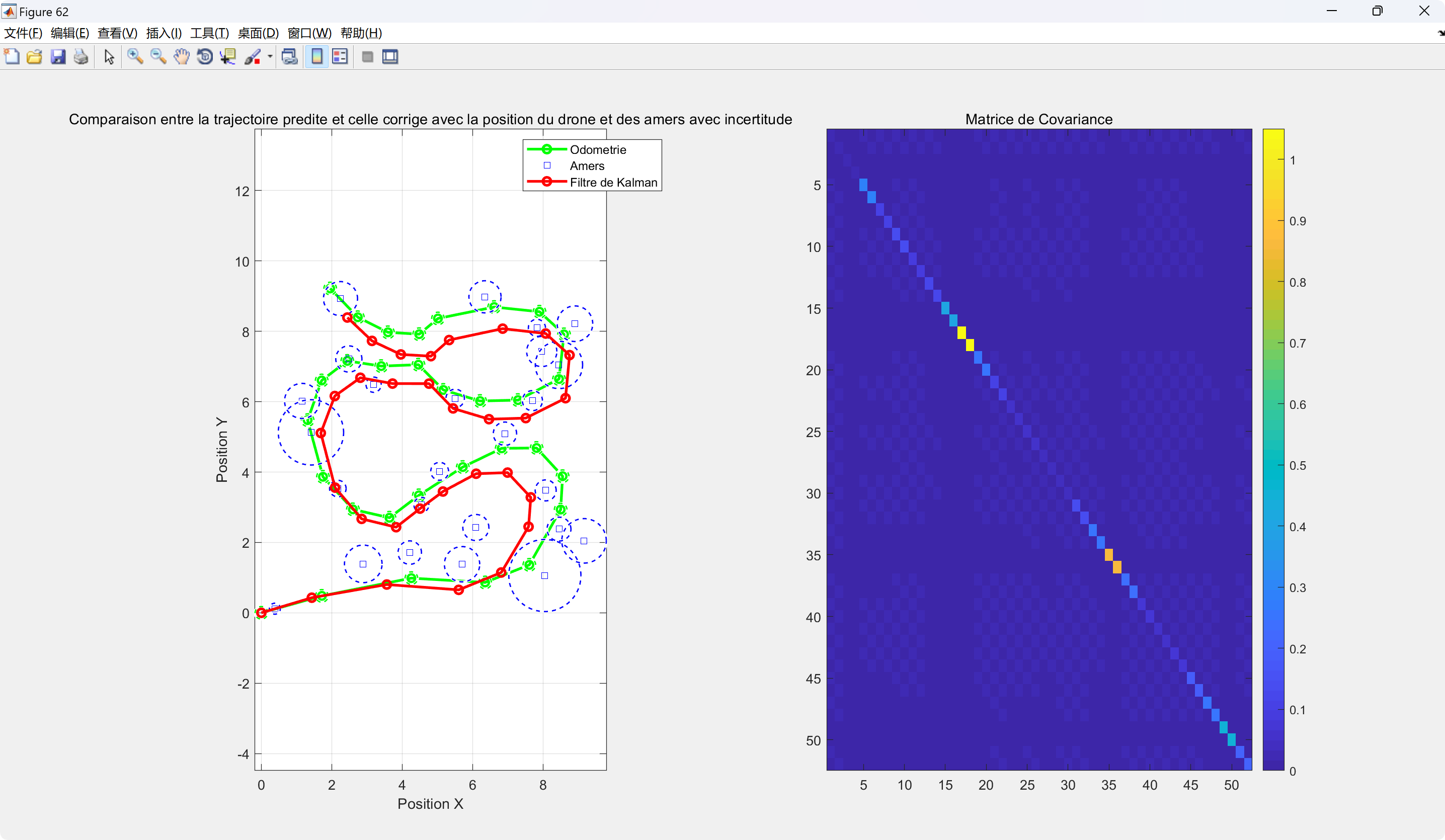
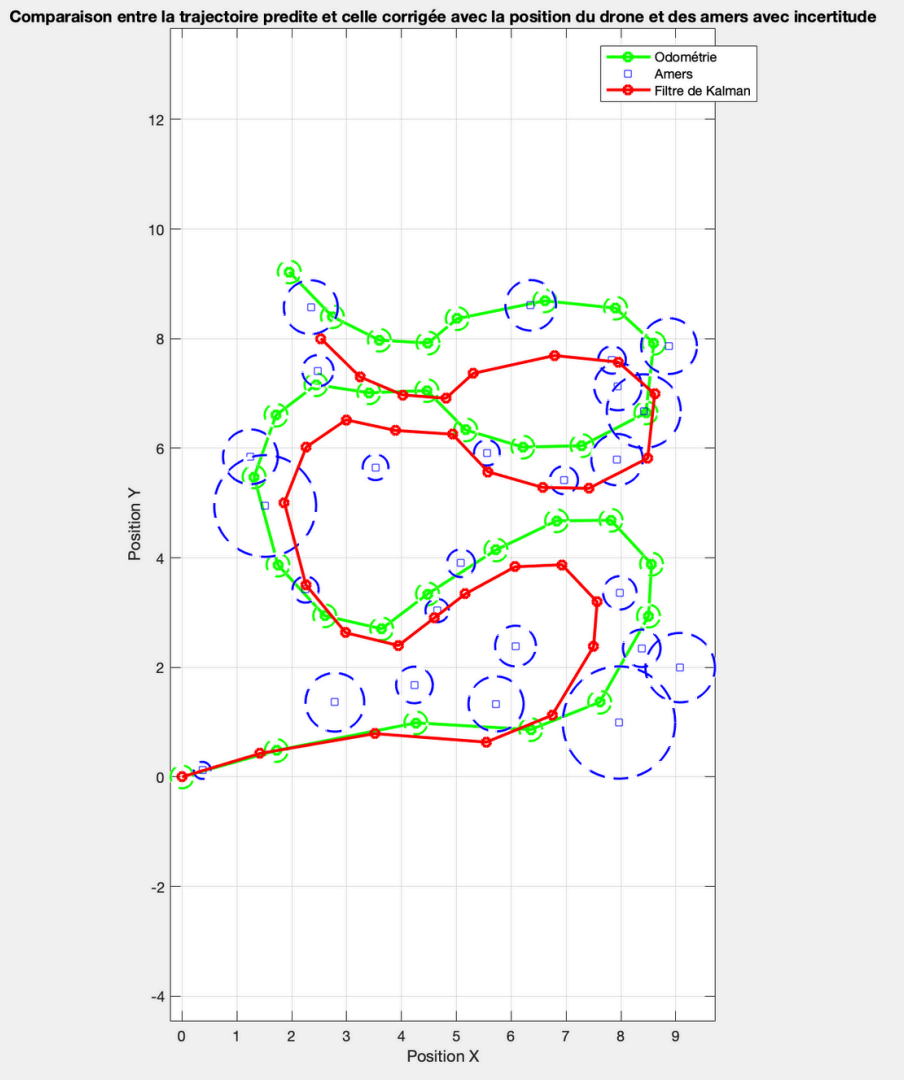
- 误差协方差管理:KF维护协方差矩阵以量化状态估计的不确定性,并通过更新步骤逐步收敛误差。
- 非线性扩展:针对非线性系统,扩展卡尔曼滤波(EKF)通过一阶泰勒展开对模型线性化,实现非线性状态估计。例如,EKF-SLAM将机器人运动方程和观测方程线性化后,应用于机器人位姿与地图特征联合估计。
数学表达:
二、二维地图绘制的关键技术
-
SLAM算法选择:
- Gmapping:基于粒子滤波(RBPF),通过自适应重采样减少粒子退化,适用于低特征场景。
- Hector SLAM:依赖高精度激光雷达数据,采用多分辨率地图优化,避免局部最优。
- EKF-SLAM:适用于中小规模场景,通过线性化处理联合估计状态与地图。
-
地图表示方法:
- 栅格地图:将环境划分为网格单元,记录每个单元的占据概率(如Gmapping生成的Occupancy Grid Map)。
- 特征地图:提取环境中的点、线等几何特征,适用于EKF-SLAM中的稀疏表示。
-
路径规划与地图优化:
- A*算法:结合启发式搜索,生成最短路径,需与SLAM输出的栅格地图集成以实现动态避障。
- 后端优化:如加权非线性最小二乘(WNLLS),用于全局地图一致性优化,与EKF的前端实时估计结合可提升精度。
三、系统架构设计
-
模块划分:
- 传感器层:激光雷达、IMU、里程计等多源数据融合,预处理(如去畸变、时间同步)。
- 状态估计层:EKF/UKF实现位姿预测与地图特征更新,协方差矩阵传递不确定性。
- 数据关联:通过最近邻(NN)或JCBB算法匹配观测与地图特征,解决特征对应问题。
- 地图构建:根据更新后的状态动态生成或修正栅格/特征地图。
-
混合架构:
- 局部滤波+全局优化:前端使用EKF进行实时状态估计,后端采用图优化(如g2o)闭环检测与全局调整,兼顾效率与精度。
- 动态权重融合:根据传感器置信度调整卡尔曼增益,例如在激光雷达与视觉融合中,动态分配Q、R矩阵权重以提升鲁棒性。
四、案例研究:EKF与二维地图绘制的整合
-
动态环境下的EKF-SLAM:
- 实验设置:TurtleBot3机器人搭载2D激光雷达,在Gazebo模拟环境中运动。
- 结果:EKF-SLAM在纹理丰富区域(如标志物b、d)达到99%以上定位精度,但复杂形状或反射表面(如物体c)精度下降至23.6%,凸显数据关联与噪声模型的挑战。
-
EKF与WNLLS的协同优化:
- 方法:前端EKF实时估计,后端WNLLS对历史数据进行批量优化,减少累积误差。
- 仿真验证:在MATLAB中模拟噪声环境,EKF+WNLLS相比纯EKF的地图误差降低40%,尤其在传感器噪声较高时效果显著。
五、卡尔曼滤波的优化策略
-
算法改进:
- 平方根UKF(SR-UKF) :通过Cholesky分解协方差矩阵,避免数值不稳定,计算效率提升25%。
- 四元数表示:用四元数替代欧拉角描述姿态,减少奇异性问题,提升UKF在三维旋转中的精度。
-
参数整定:
- 自适应Q/R调整:基于残差协方差在线调整过程噪声Q与观测噪声R,适应动态环境变化。
- 多传感器融合:激光雷达与IMU的EKF融合中,通过实验标定Q、R初始值,平衡预测与观测权重。
六、未来研究方向
- 多模态融合:结合视觉SLAM的稠密点云与激光雷达的精确测距,提升复杂场景重建能力。
- 边缘计算优化:在嵌入式平台部署轻量化EKF,通过FPGA加速协方差矩阵运算。
- 自适应SLAM:利用深度学习动态调整卡尔曼滤波参数,应对动态障碍物与传感器失效。
通过上述多维度整合,基于卡尔曼滤波的SLAM系统能够在二维地图绘制中实现高精度定位与稳健建图,为自主导航提供可靠基础。
📚2 运行结果
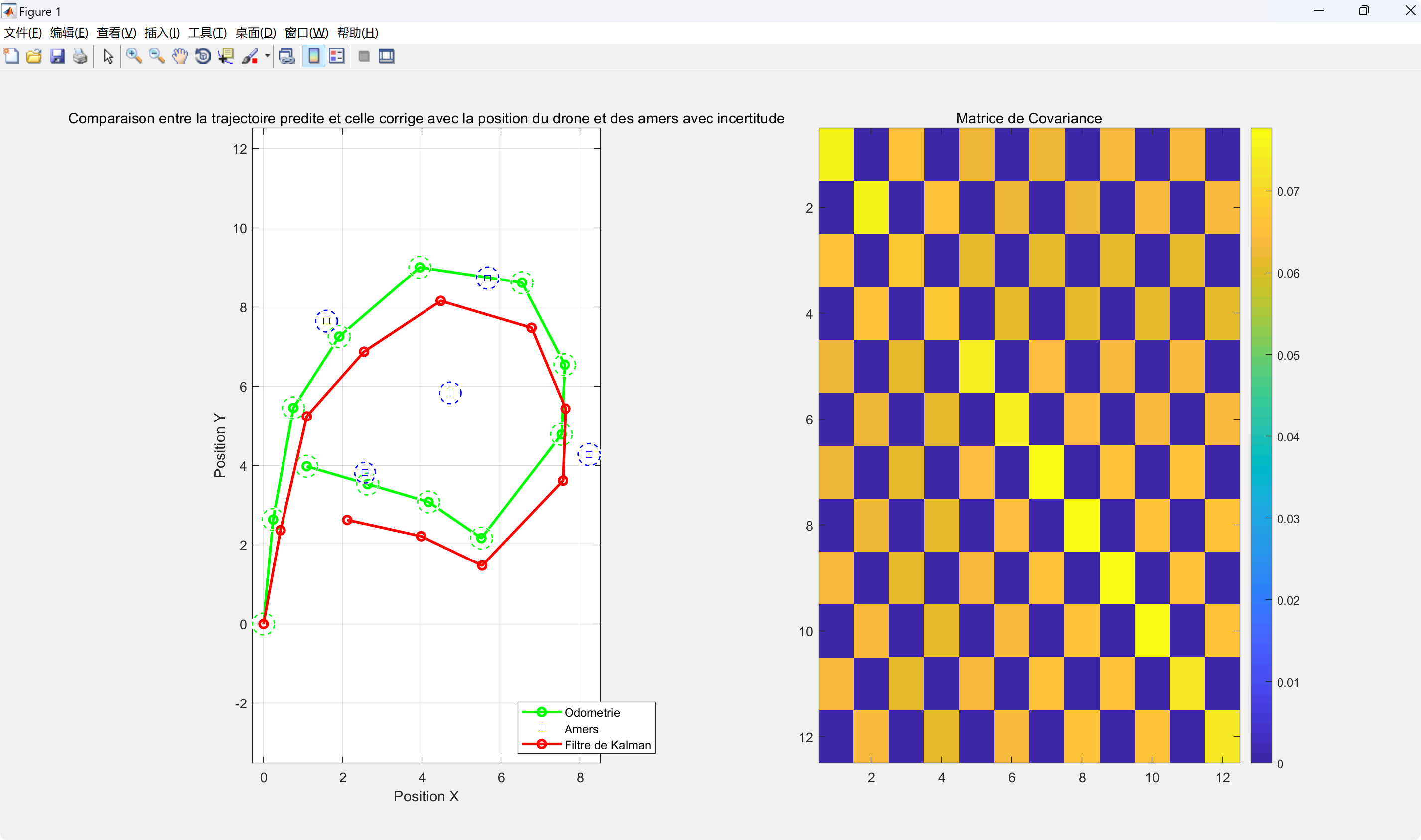
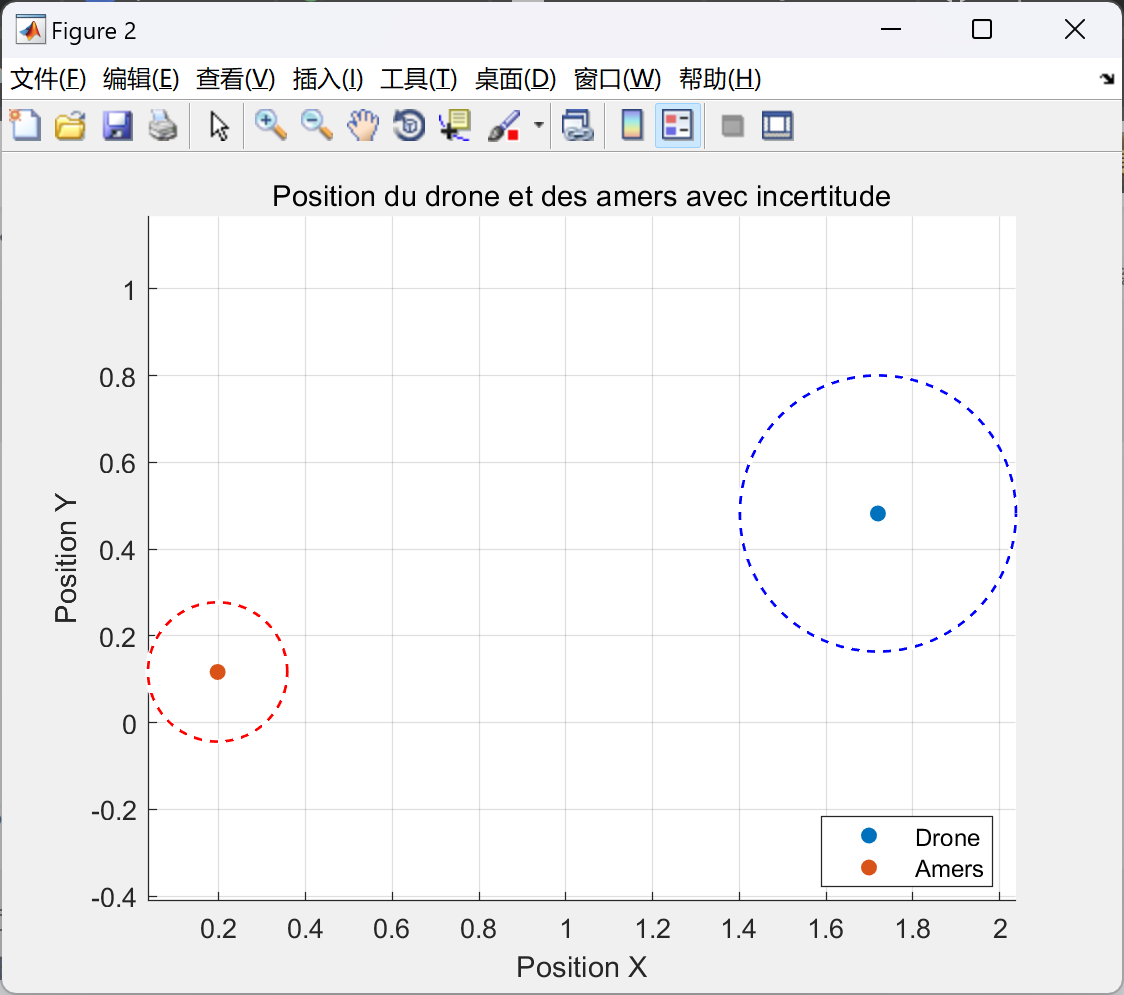
......
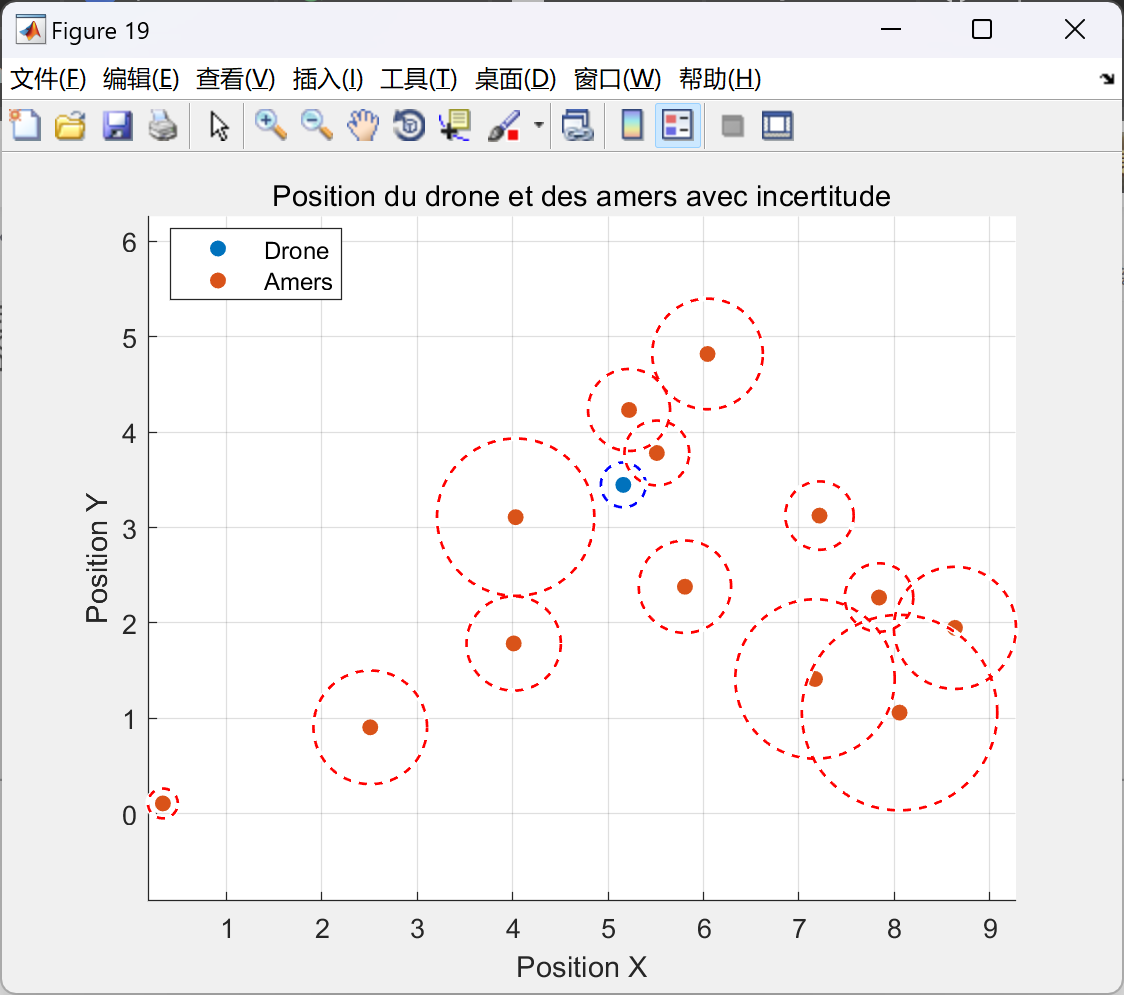
运行结果图比较多,就不一一展示。
部分代码:
%Script principal
clear;
close all;
addpath (genpath('.')); %sous repertoire
% Specifier le nom du fichier
nom_fichier = 'inputs/FullObservation.data';
% Ouvrir le fichier en mode lecture
fid = fopen(nom_fichier, 'r');
% Lecture des premi猫res perceptions
ligne = fgetl(fid);
format_percep = '%s : %f %f %f %f %f %f %f %f %f %f';
data_percep = textscan(ligne, format_percep, 'Delimiter', ' ');
% Initialiser variables
k_odo = 0.1;
k_y = 0.1;
Yt = zeros(10, 1);
for i = 1:10
Yt(i) = data_percep{i+1};
end
[Xt, Pt, A, B, Ht] = init(Yt, k_y);
% Affichage carte
%affichage(Xt,Pt);
%pause(1);
% Initialisation variables d'affichage
u_t = zeros(2,1);
Xt_kalman = zeros(2,1);
% Lire le fichier ligne par ligne
while ~feof(fid) %TQ fichier non vide
% Lecture de la ligne d'odometrie
ligne = fgetl(fid);
taille_ligne = size(ligne);
if taille_ligne(1) == 1
% Utiliser le format specifie pour les donnees d'odometrie A CHANGER
format_odom = '%s : %f %f';
data_odom = textscan(ligne, format_odom, 'Delimiter', ' ');
% Stockage des donnees d'odometrie
donnees_odom = zeros(2, 1);
for i = 1:2
donnees_odom(i) = data_odom{i+1};
end
Q = cov_odo (donnees_odom, k_odo);
% Prediction de l'etat
[Xt_star, Pt_star] = prediction_etat(Xt,donnees_odom, A, B,Pt,Q); %On a juste recup l'odometrie, R脿S
% Affichage de la carte
%affichage (Xt_star,Pt_star);
%pause(1);
% Lecture de la ligne des perceptions
ligne = fgetl(fid);
% Utiliser le format specifie pour les donnees de perception
format_percep = '%s : %f %f %f %f %f %f %f %f %f %f';
data_percep = textscan(ligne, format_percep, 'Delimiter', ' ');
Yt = zeros(10, 1);
for i = 1:10
Yt(i) = data_percep{i+1};
end
P_Y = cov_obs(Yt, k_y);
% Prediction sur la position
[Xt_star,Pt_star] = prediction_etat(Xt,donnees_odom,A, B,Pt,Q);
% Prediction sur l'observation
[Yt_star] = prediction_observateur(Xt_star, Ht);
% Correction de la prediction
[Xt, Pt] = correction_etat(Xt_star, Pt_star, Yt_star, Yt, Ht, P_Y);
% Affichage de la carte
%affichage(Xt,Pt);
%pause(1);
end
u_t = [u_t; (u_t(end-1:end) + donnees_odom)]; %On suppose odometrie initialement nulle
Xt_kalman = [Xt_kalman; Xt(1:2)];
end
affichage_ameliore(u_t, Xt_kalman, Pt, Xt);
% Fermer le fichier
fclose(fid);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]马树军,杨磊,白昕晖,等.多机器人同步定位与地图构建的地图融合算法的改进[J].控制理论与应用, 2019, 36(8):6.
[2]刘畅.基于扩展卡尔曼滤波的同步定位与地图构建(SLAM)算法研究进展[J].装备制造技术, 2017, 000(012):41-43.
🌈4 Matlab代码、文档讲解
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











