






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
本文方法基于状态依赖的里卡蒂方程(SDRE)控制技术及其梯度型神经网络的实时计算方法,允许在线控制PMSM。
为了实现用于永磁同步电机驱动器的自适应 SDRE(State-Dependent Riccati Equation)非线性无传感器速度控制,按照以下步骤进行。
1. 确定系统的动态模型:首先,获得永磁同步电机的动态模型。该模型通常由磁链方程、电流方程和机械方程等组成。根据电机的具体参数和特性,推导出系统的状态空间表达式。
2. 设计自适应 SDRE 控制器:基于系统的状态空间表达式,采用自适应 SDRE 控制策略进行设计。自适应 SDRE 控制是一种基于 Riccati 方程调节器的非线性控制方法,它通过自适应参数来优化控制器的性能。具体设计步骤包括:设置控制器结构、定义控制误差目标和性能指标、计算状态反馈增益矩阵和 Riccati 方程解。
3. 实现无传感器速度估计器:由于无传感器速度控制,需要通过估计器来获取电机转速的信息。可以采用滑模观测器或者其他速度估计器来实现,以获得无传感器的速度测量。
4. 连接控制器和估计器:将自适应 SDRE 控制器和无传感器速度估计器与电机的动态模型相连接。确保控制器能够接收估计到的速度信号,并提供相应的控制输出。
5. 仿真和调试:在 Simulink 环境中建立仿真模型,并进行仿真验证。通过逐步参数调整和性能评估,对控制系统进行调试和优化。
用于永磁同步电机驱动器的自适应SDRE非线性无传感器速度控制研究
一、引言
永磁同步电机(PMSM)因其高效率、高功率密度和良好的动态性能,在电动汽车、工业驱动和风力发电等领域得到了广泛应用。然而,传统的PMSM速度控制方法依赖于速度传感器来获取转速信息,这不仅增加了系统的复杂性和成本,还降低了系统的鲁棒性和可靠性。因此,研究无传感器的速度控制方法对于PMSM驱动器的发展具有重要意义。本文基于自适应系统动态逆控制(SDRE)技术,探讨了一种非线性无传感器速度控制方法,旨在减少对传感器的依赖并提高系统的性能。
二、研究背景与意义
- 传感器依赖性问题:传统PMSM速度控制方法中,速度传感器是关键部件,但其存在成本高、易故障、易受环境干扰等问题,影响系统的整体性能。
- 系统鲁棒性提升:无传感器速度控制方法能够克服传感器带来的限制,提高系统的鲁棒性和可靠性,降低维护成本。
- 自适应SDRE技术的优势:SDRE是一种非线性控制方法,能够适应系统的非线性特性,并且不需要精确的系统模型。基于SDRE的无传感器速度控制方法,结合自适应控制策略,能够实现高性能的速度控制。
三、研究方法
- 数学模型建立
- 建立PMSM的数学模型,包括电压方程、磁链方程和转矩方程等,为后续控制算法的设计提供基础。
- 自适应SDRE控制策略
- 采用SDRE控制策略,根据系统的实时状态动态调整控制参数,实现对PMSM驱动器的高性能速度控制。
- 利用梯度型神经网络的实时计算方法,实现控制参数的在线优化,提高系统的适应性和鲁棒性。
- 无传感器速度估计
- 结合电机的非线性特性和自适应控制策略,通过电机电流、电压等可测量信号,实时估计电机的转速信息。
- 利用观测器或滤波器等技术手段,提高速度估计的精度和稳定性。
- 仿真与实验验证
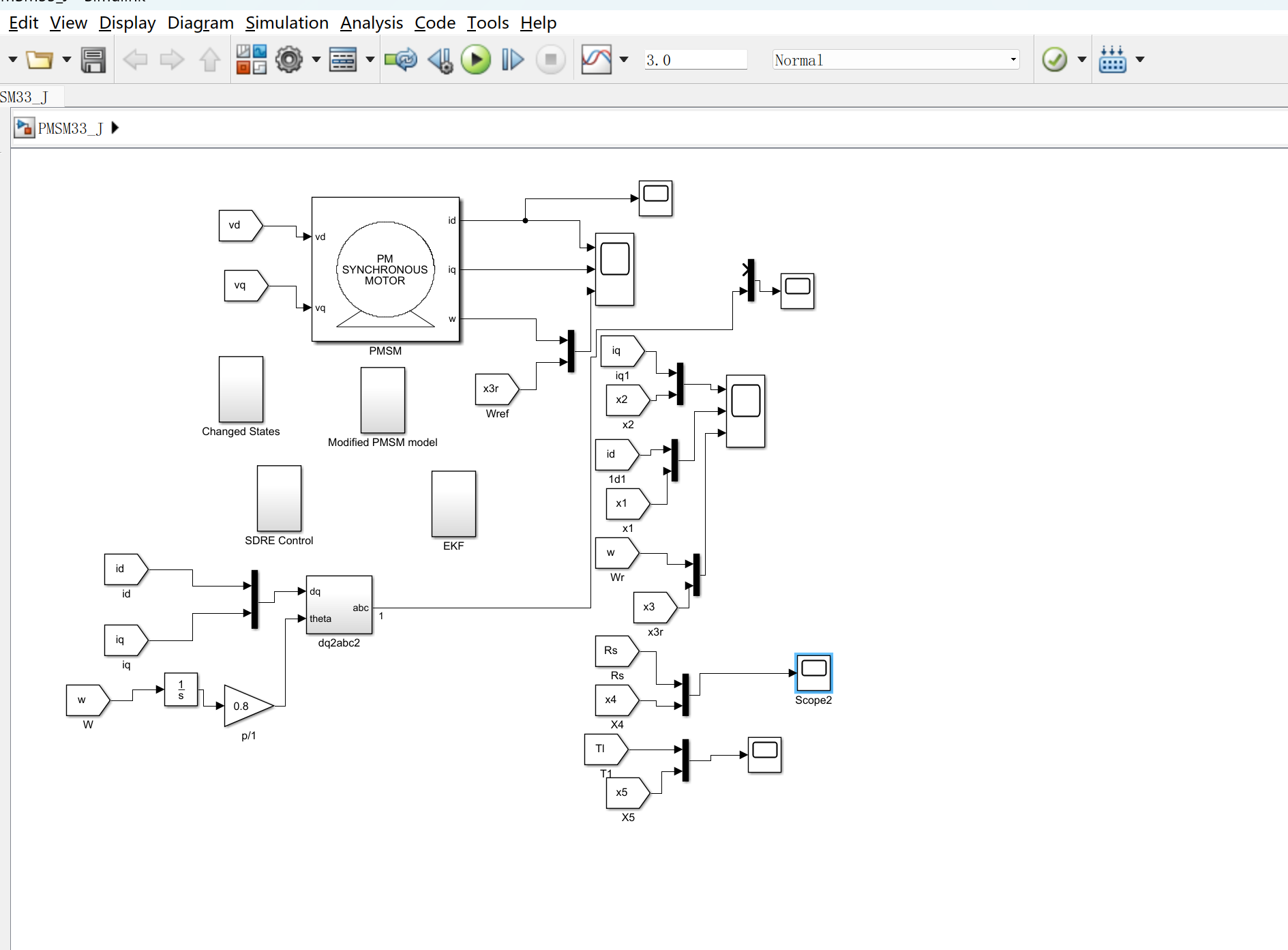
- 在Matlab/Simulink环境下搭建PMSM驱动器的仿真模型,对提出的控制算法进行仿真验证。
- 设计实验平台,对实际PMSM驱动器进行测试,验证控制算法的有效性和优越性。
四、研究结果与分析
- 仿真结果
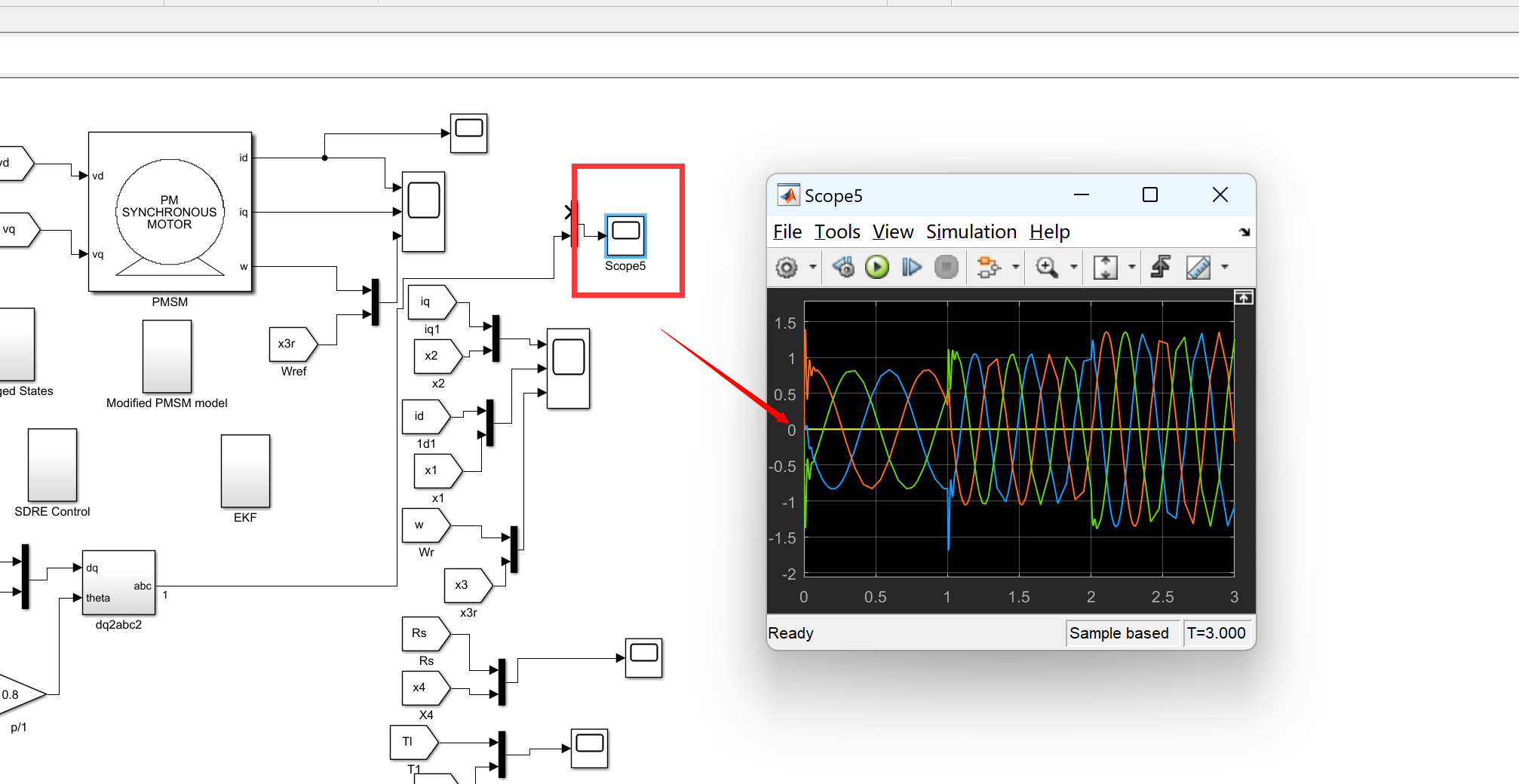
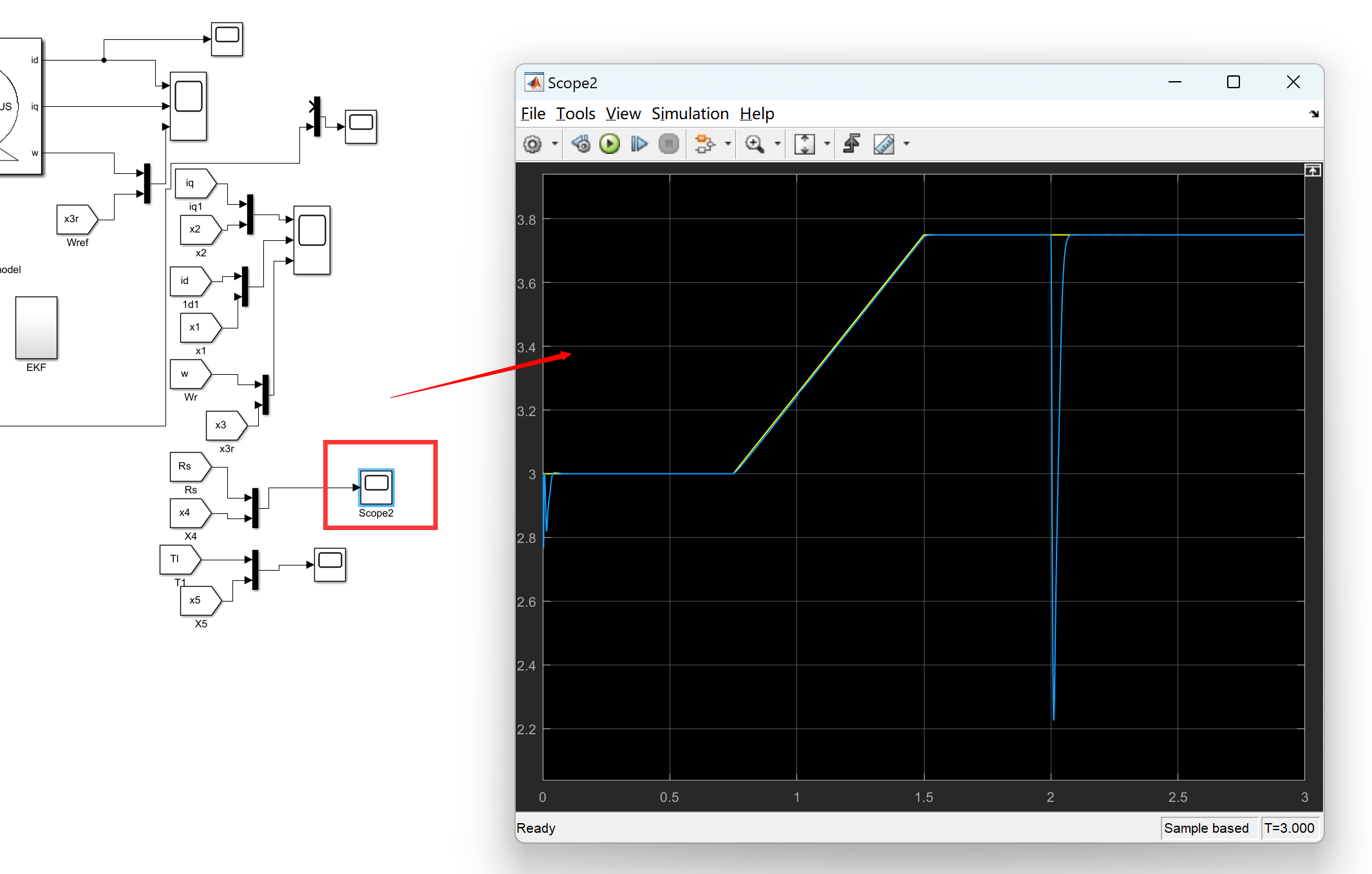
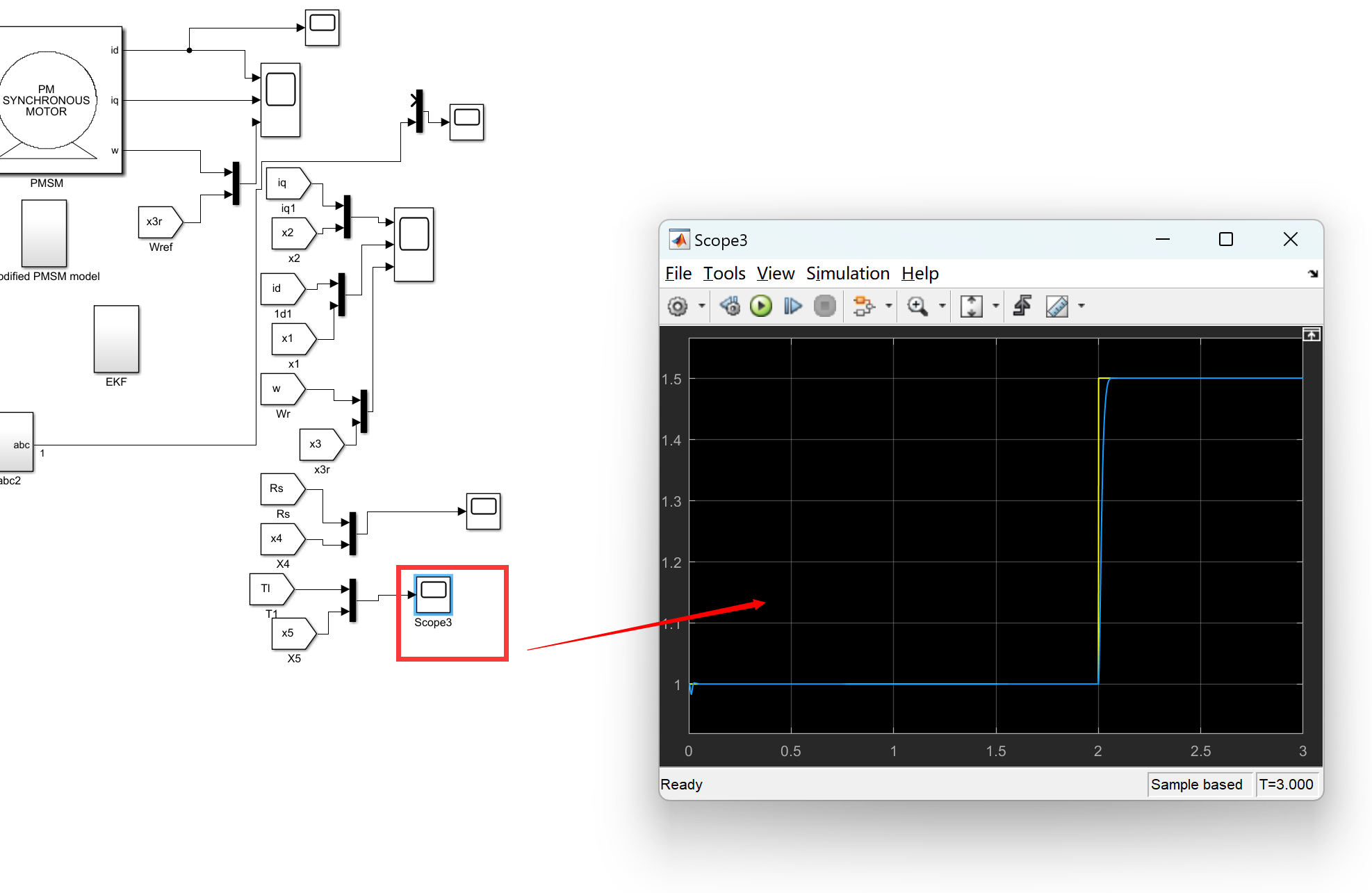
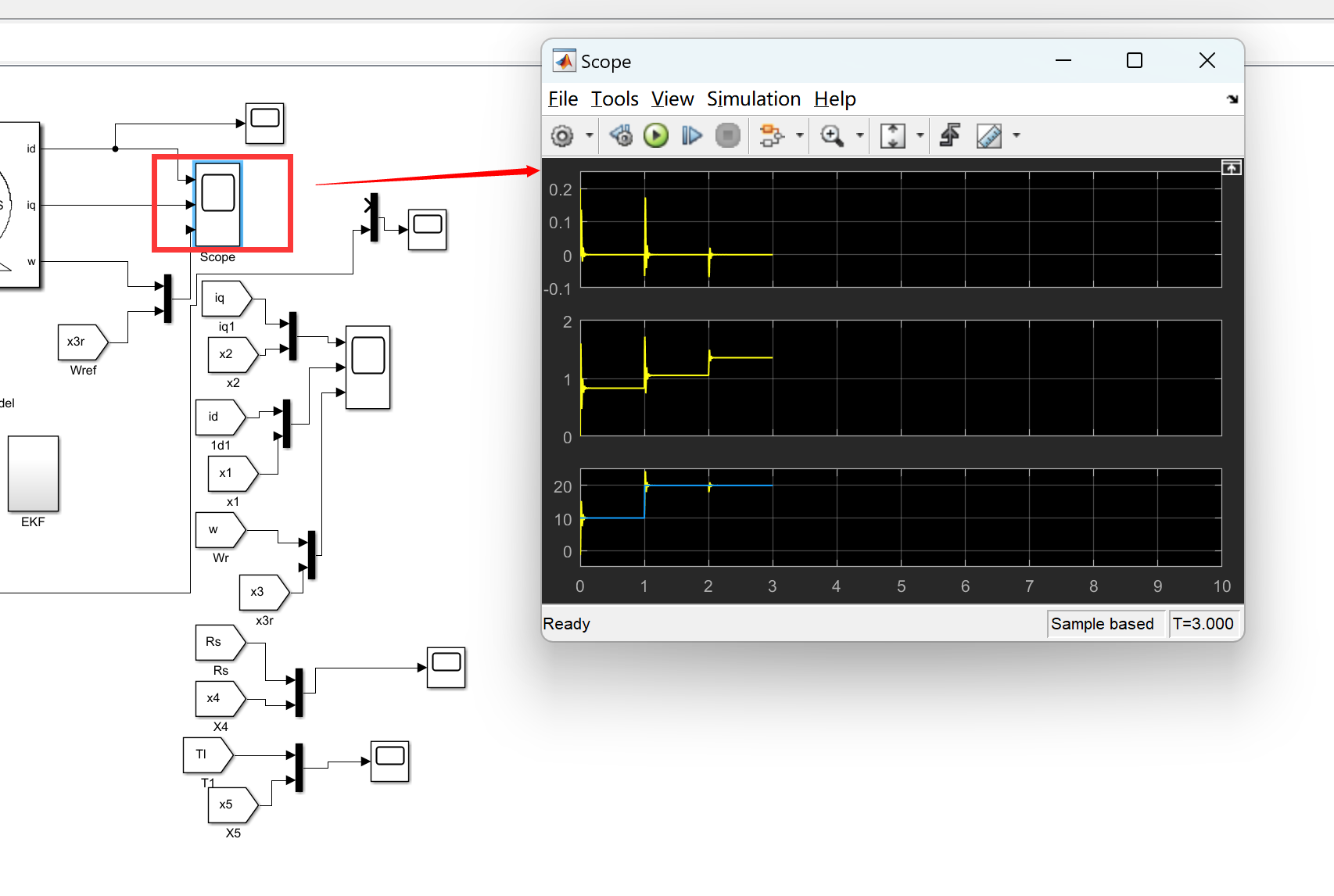
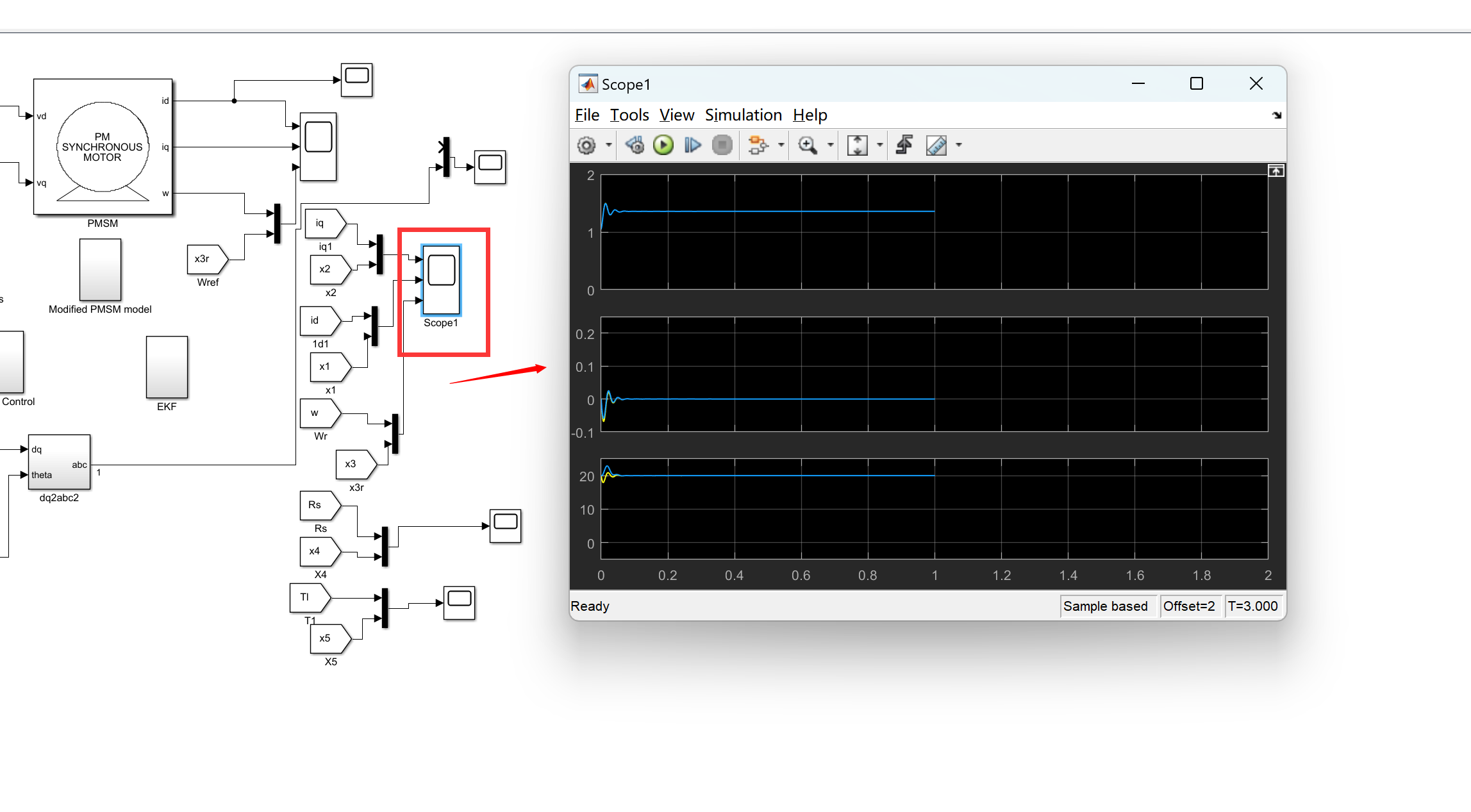
- 仿真结果表明,基于自适应SDRE的非线性无传感器速度控制方法能够准确估计电机的转速信息,实现高精度的速度控制。
- 在不同负载和工况下,系统均表现出良好的动态响应和稳定性。
- 实验结果
- 实验结果进一步验证了仿真结果的正确性。在实际PMSM驱动器上,该控制方法能够有效实现无传感器速度控制,降低系统对传感器的依赖。
- 与传统控制方法相比,该方法在控制精度、鲁棒性和动态响应等方面均表现出明显的优势。
五、结论与展望
- 结论
- 本文基于自适应SDRE技术,提出了一种用于PMSM驱动器的非线性无传感器速度控制方法。通过仿真和实验验证,该方法能够准确估计电机转速信息,实现高性能的速度控制,并且具有较强的鲁棒性和适应性。
- 展望
- 未来研究可以进一步优化控制算法,提高速度估计的精度和稳定性。
- 探索更多先进的控制策略和技术手段,如深度学习、人工智能等,以进一步提升PMSM驱动器的性能和智能化水平。
通过本文的研究,为PMSM驱动器的无传感器速度控制提供了一种新的思路和方法,为工业应用和科研领域提供了更加可靠和高效的控制方案。
📚2 运行结果

 matlab程序:
matlab程序:
clc
clear all
Rs=0.625
Ld=0.036
Lq=0.051
phi=0.545
J=7.5e-4
F=0.036
P=2
% a1=R/Ld
a2=P*Lq/Ld
a3=P*Ld/Lq
% a4=R/Lq
a5=P*phi/Lq
a6=3/2*P*phi/J
a7=F/J
B=[1 0;0 1;0 0]
Qc=[1 0 0;0 1 0;0 0 1]
R=[1 0;0 10]
x2dot=0
x3dot=0
gama=0.1
% syms a1 a2 a3 a4 a5 a6 a7 x1 x2 x3 R
% f=[-a1*R*x1+a2*x2*x3; -a3*x1*x3-a4*R*x2-a5*x3; a6*x2-a7*x3-1/J*Tl;0]
% jacobian(f,[x1 x2 x3 R ])
% E=4300170000*[1e-6 0 0 0 ;0 1e-6 0 0 ;0 0 1e-6 0 ;0 0 0 1e-6 ]
Rk=0.09*[1 0;0 1]
E=4300180000*[1e-6 0 0 0 0 ;0 1e-6 0 0 0 ;0 0 1e-6 0 0 ;0 0 0 1e-2 0; 0 0 0 0 1e-5]
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]刘伟波,邢佳丽,赵向禹等.双三相多相永磁同步电机驱动器混合直接转矩控制策略[J].科学技术与工程,2022,22(09):3564-3575.
[2]黄义红,张峻涛,刘丹. 机载永磁同步电机驱动器电流重构设计[C]//中国航空学会.第五届中国航空科学技术大会论文集.北京航空航天大学出版社(BEIHANG UNIVERSITY PRESS),2021:592-596.DOI:10.26914/c.cnkihy.2021.064916.
[3]凌峰. 无轴承异步电机非线性解耦控制与无传感器控制研究[D].江苏大学,2021.DOI:10.27170/d.cnki.gjsuu.2021.001911.
[4]江俊. 基于非线性估计理论的永磁同步电机无传感器控制方法的研究[D].江南大学,2006.




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











