






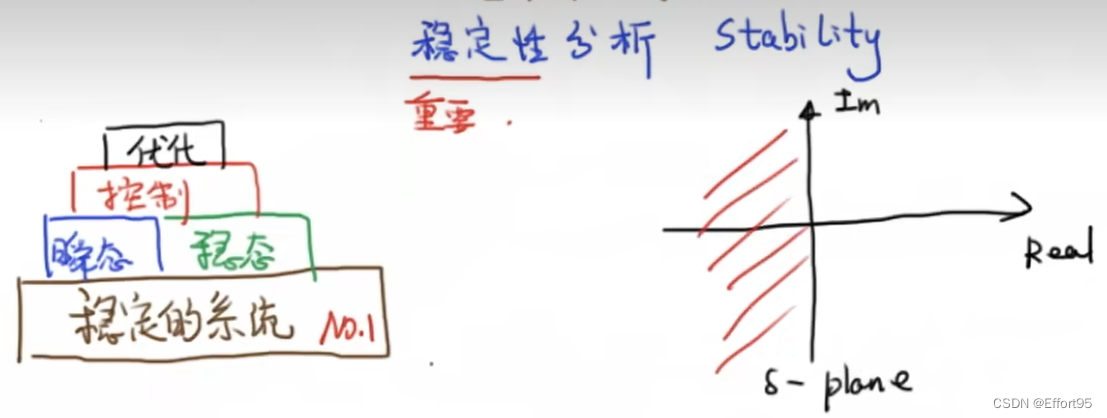
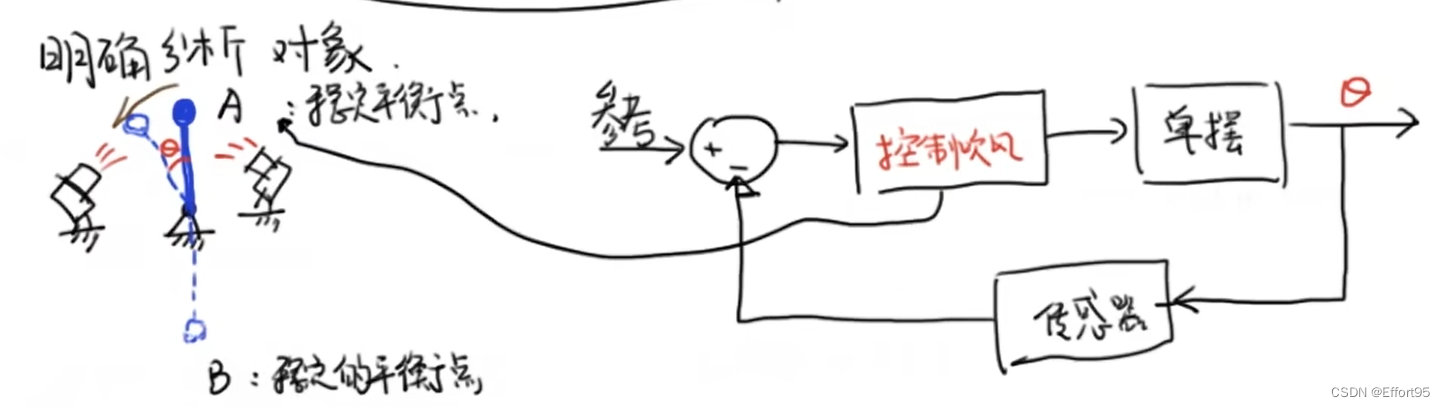
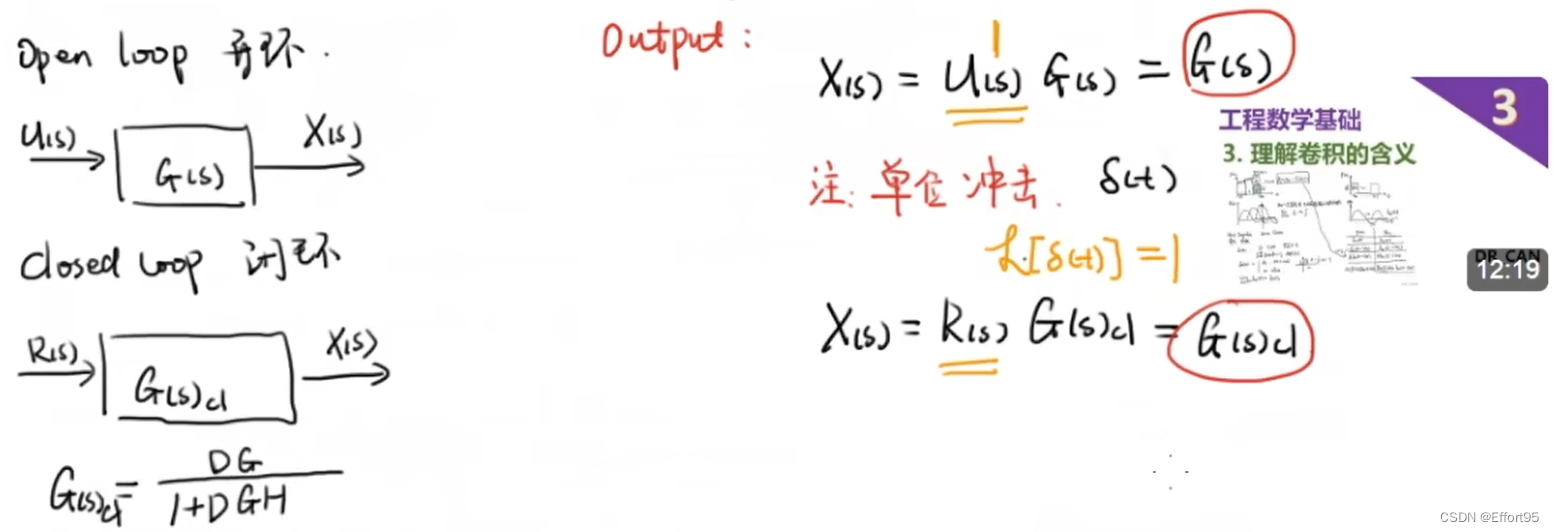
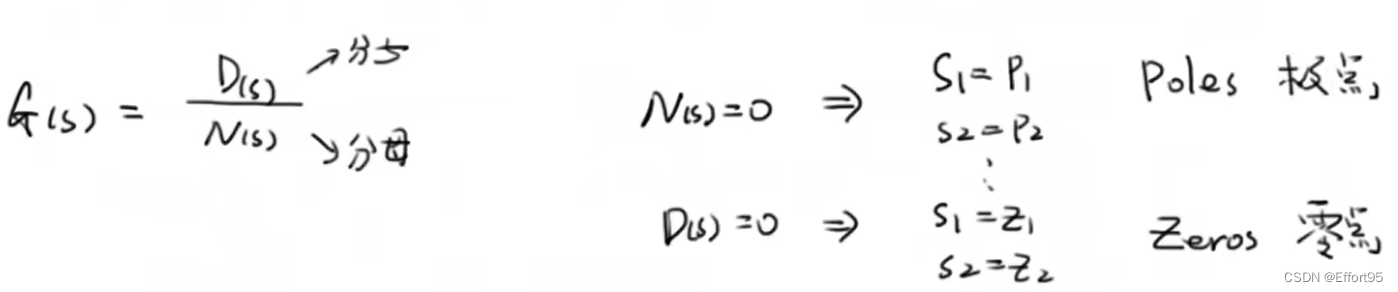
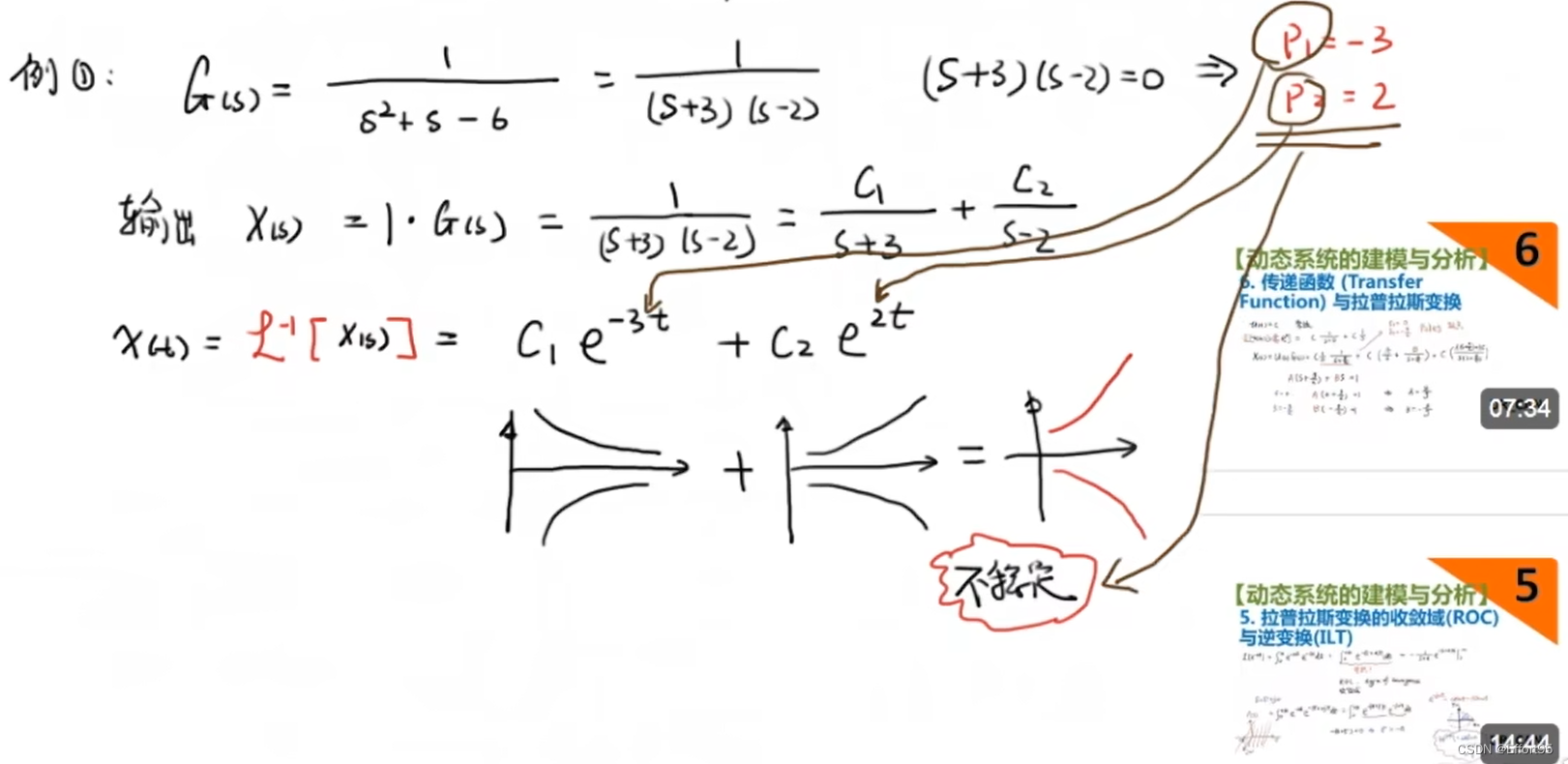
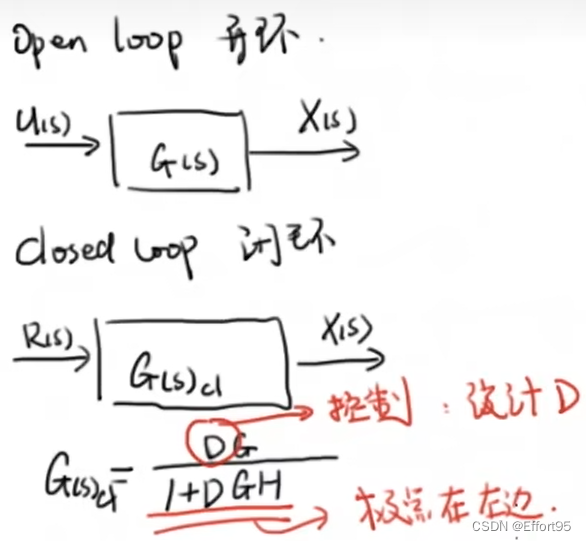
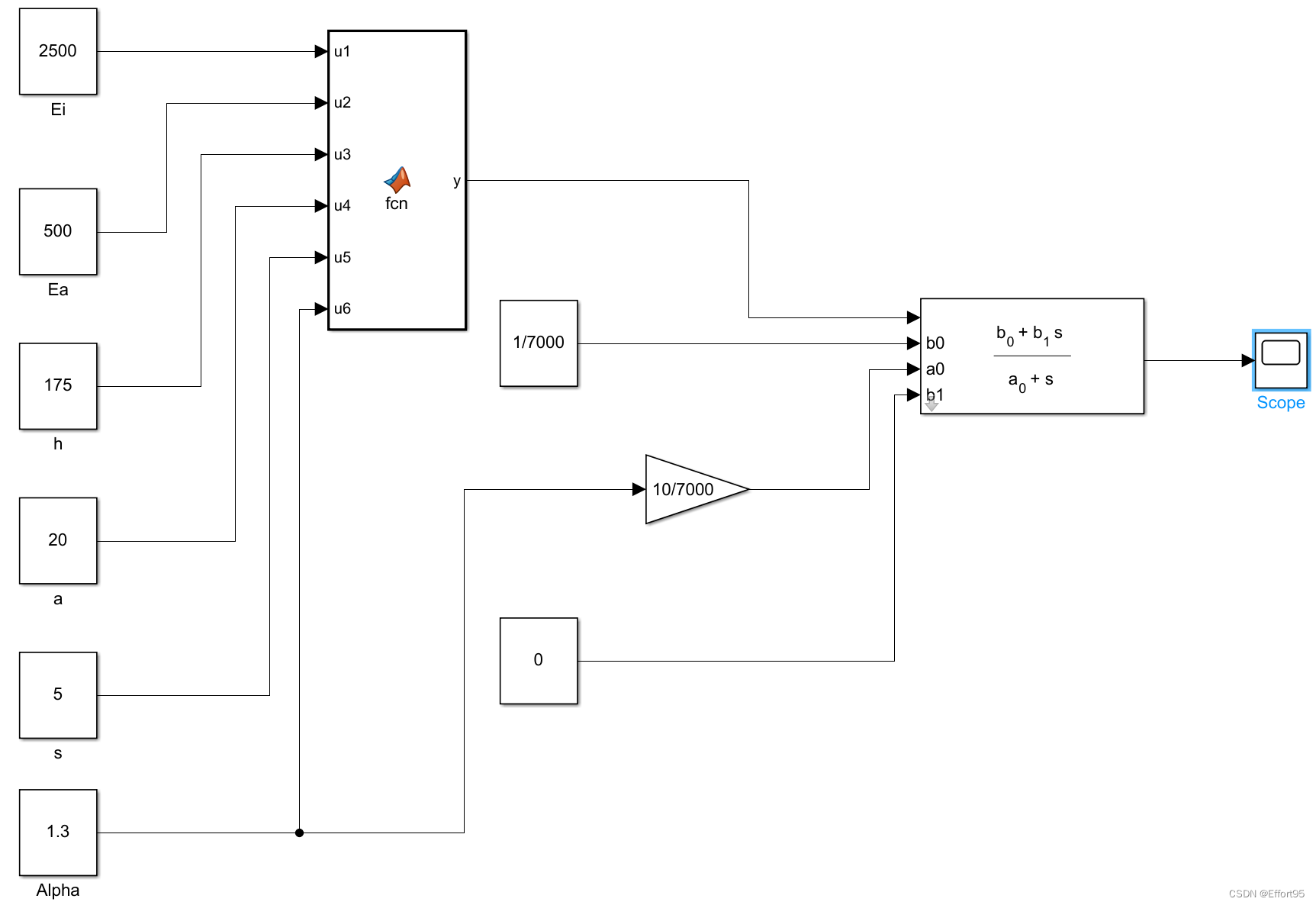
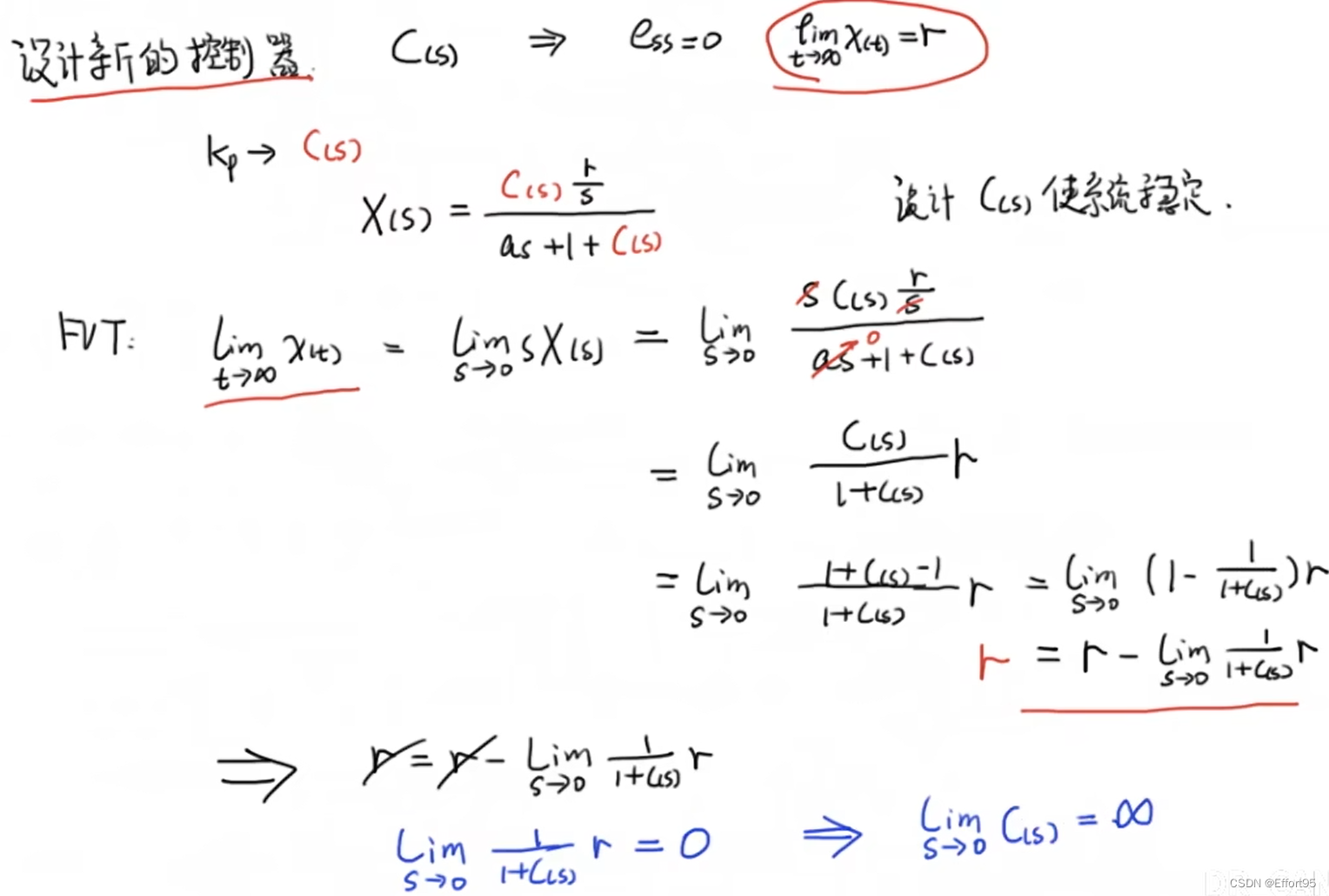
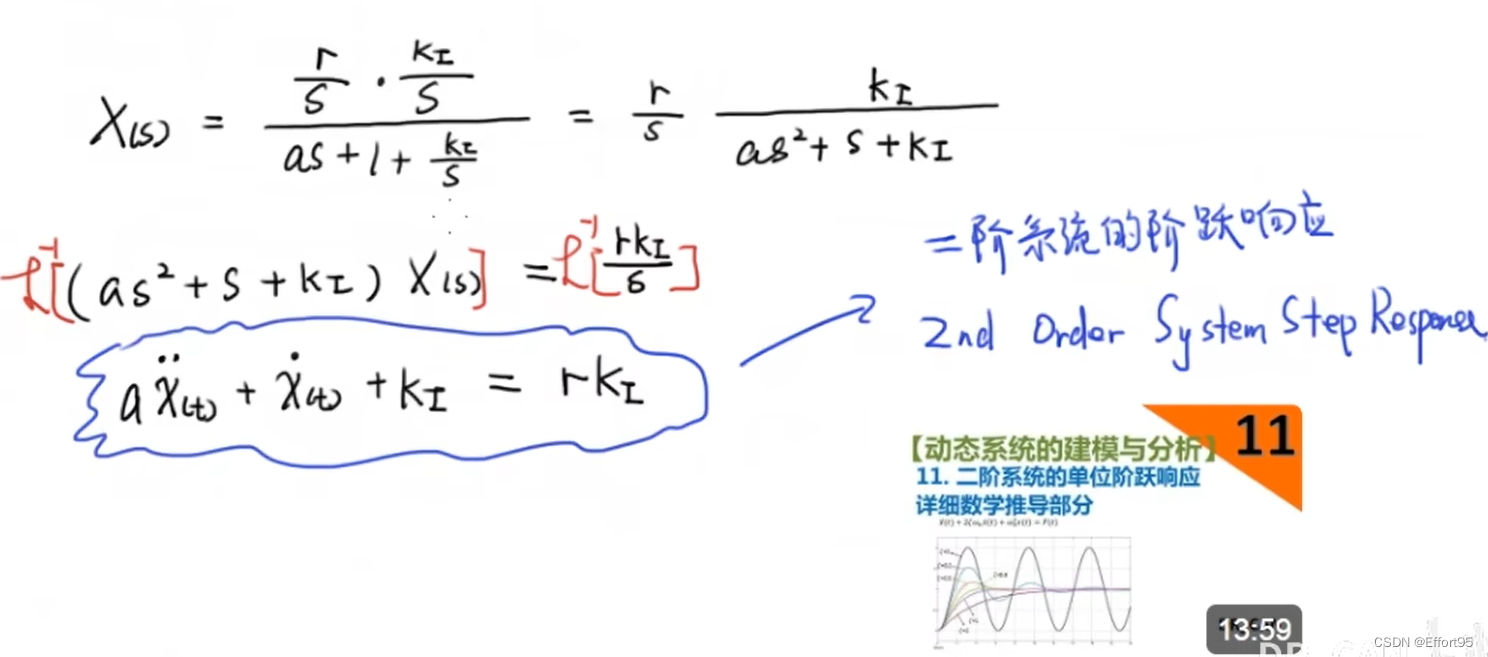
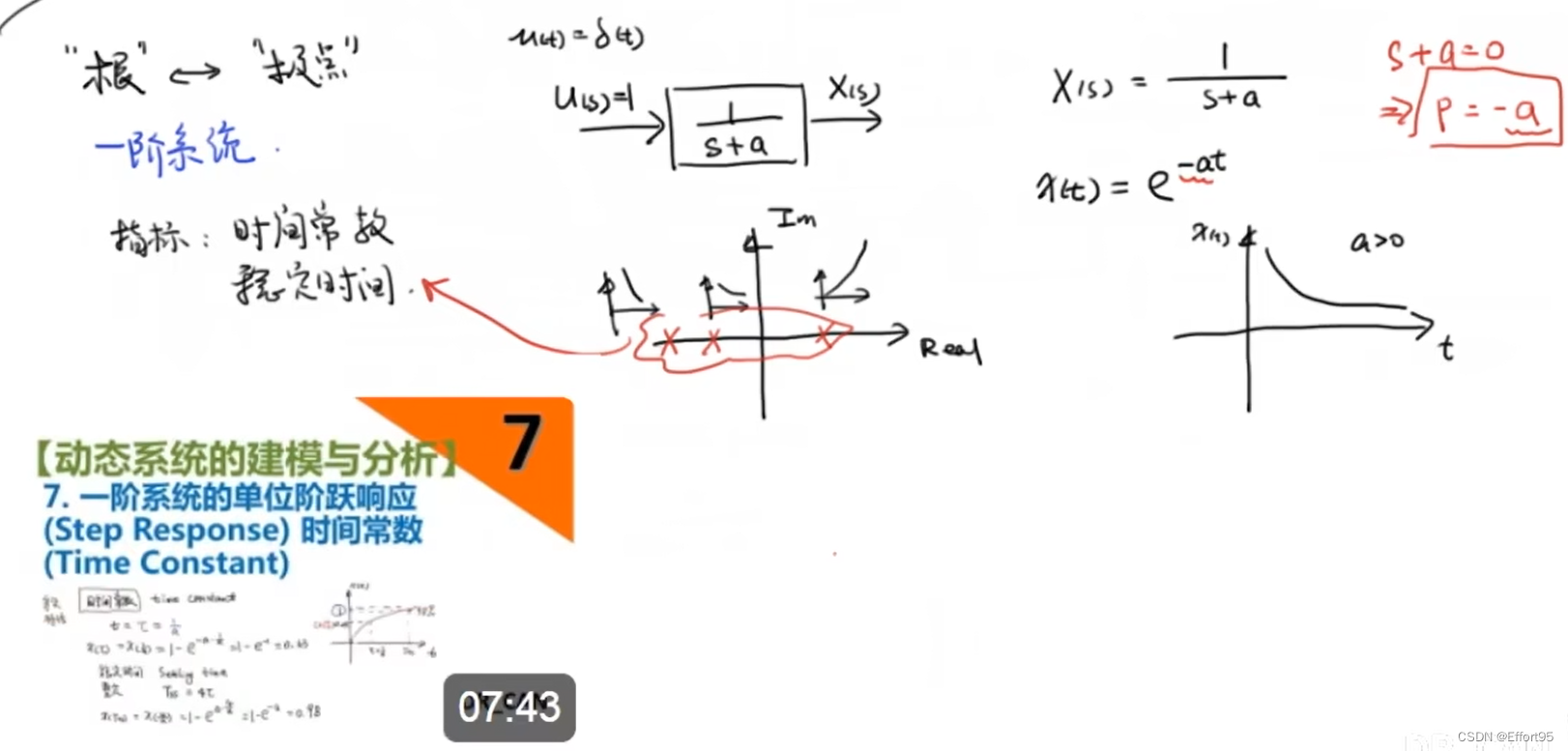
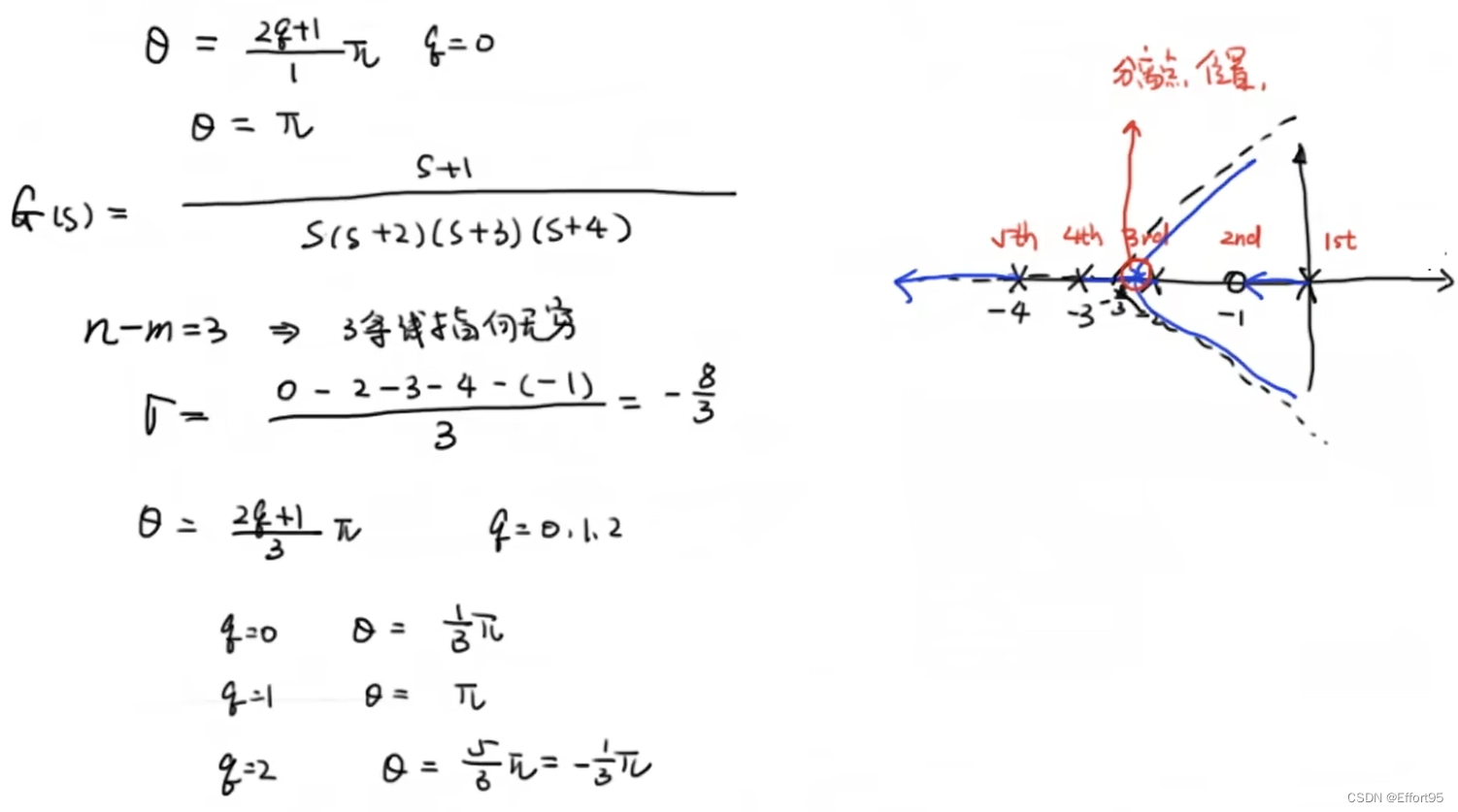
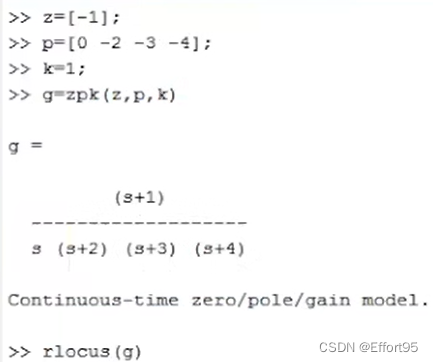
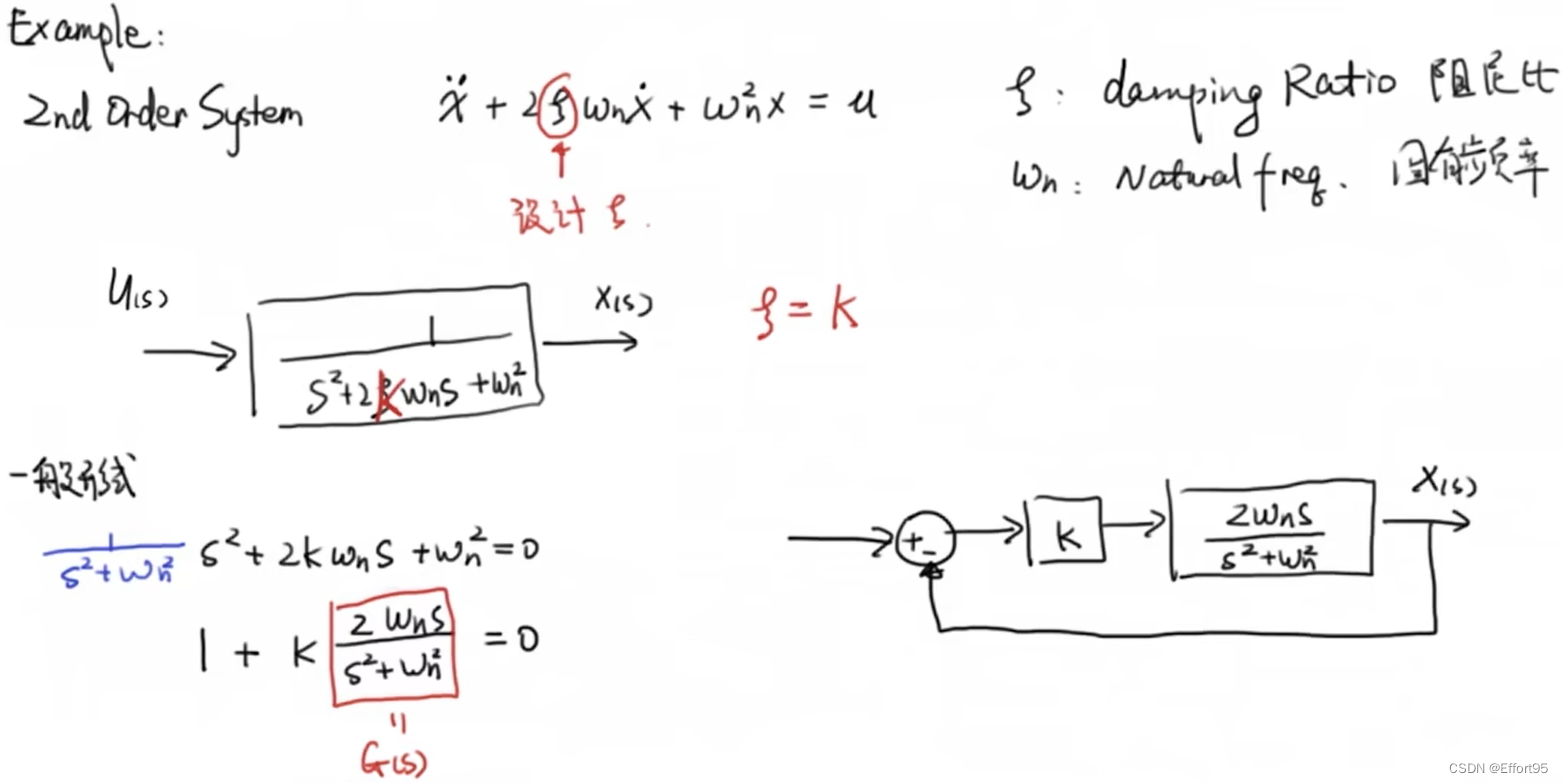
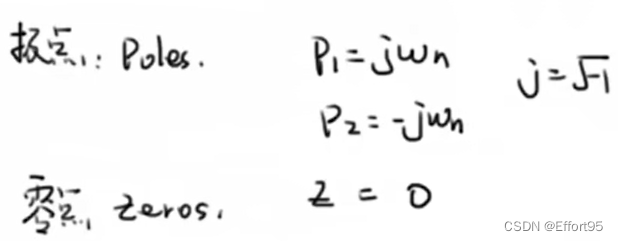
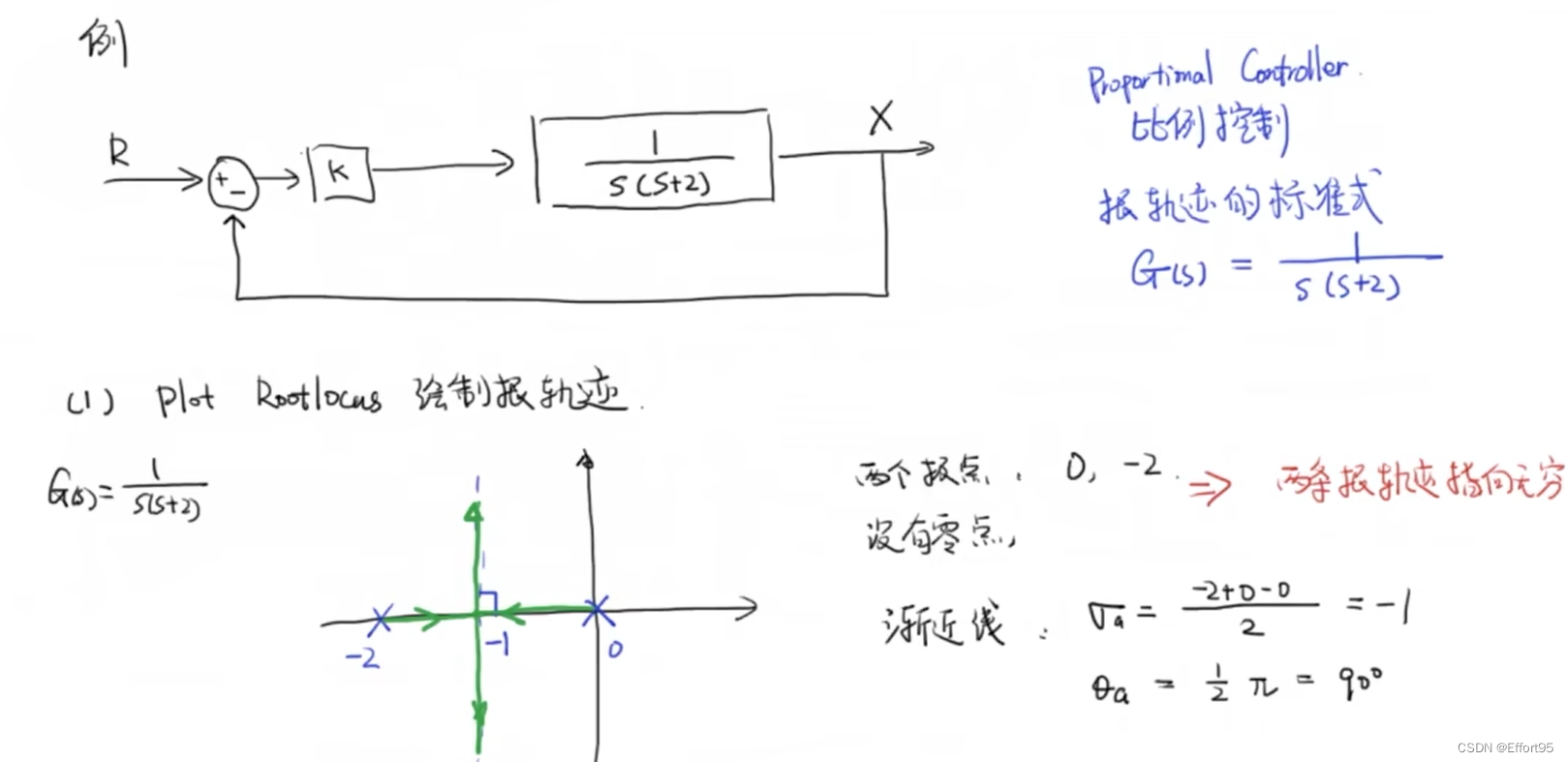
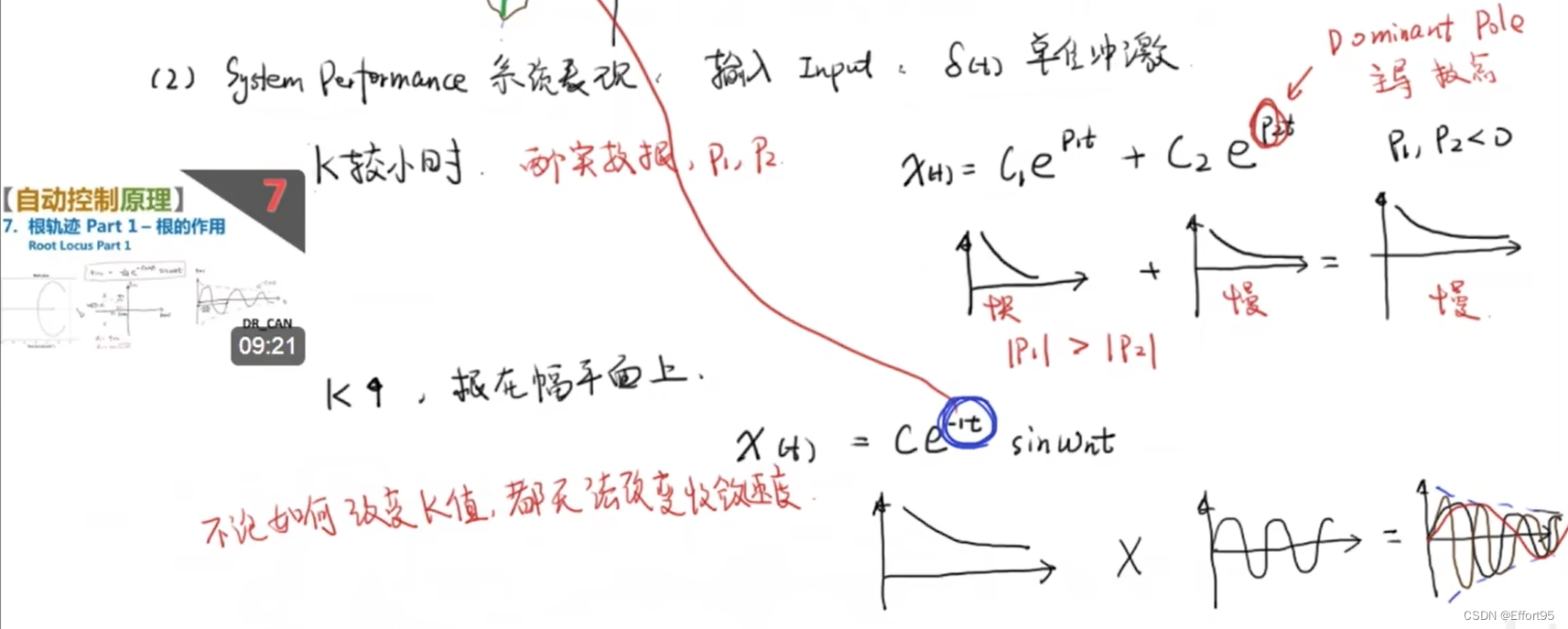
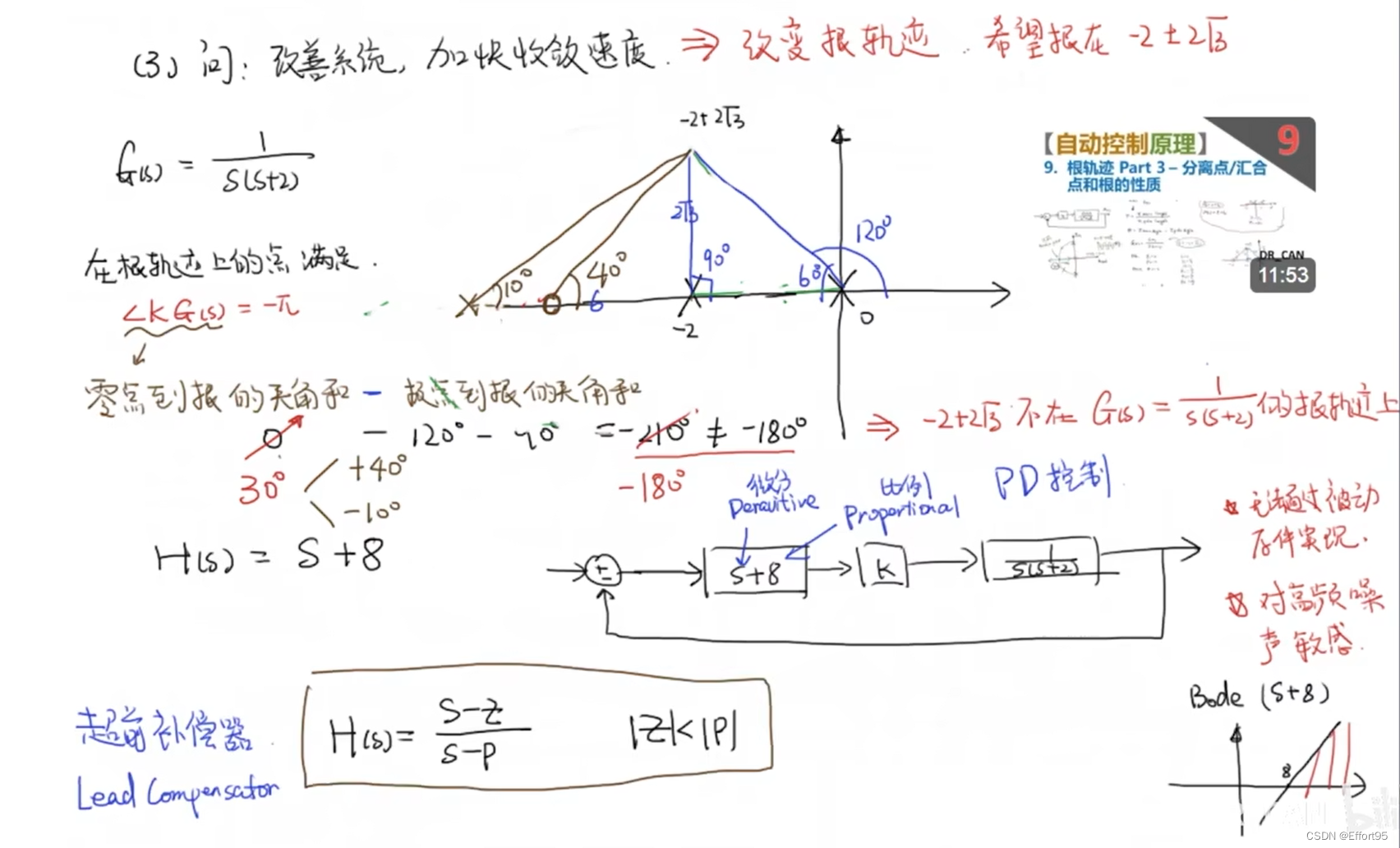
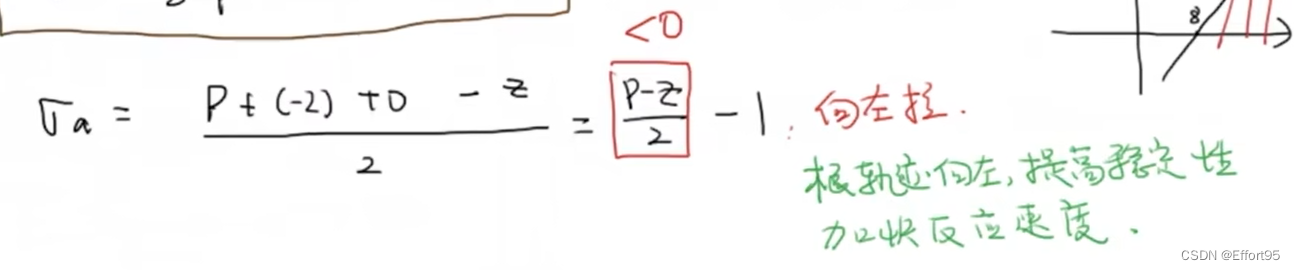
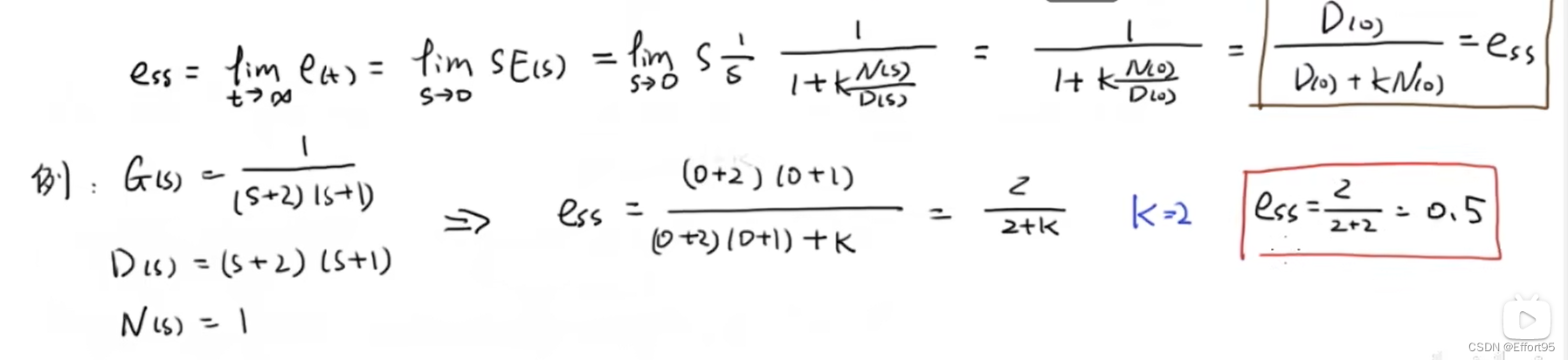
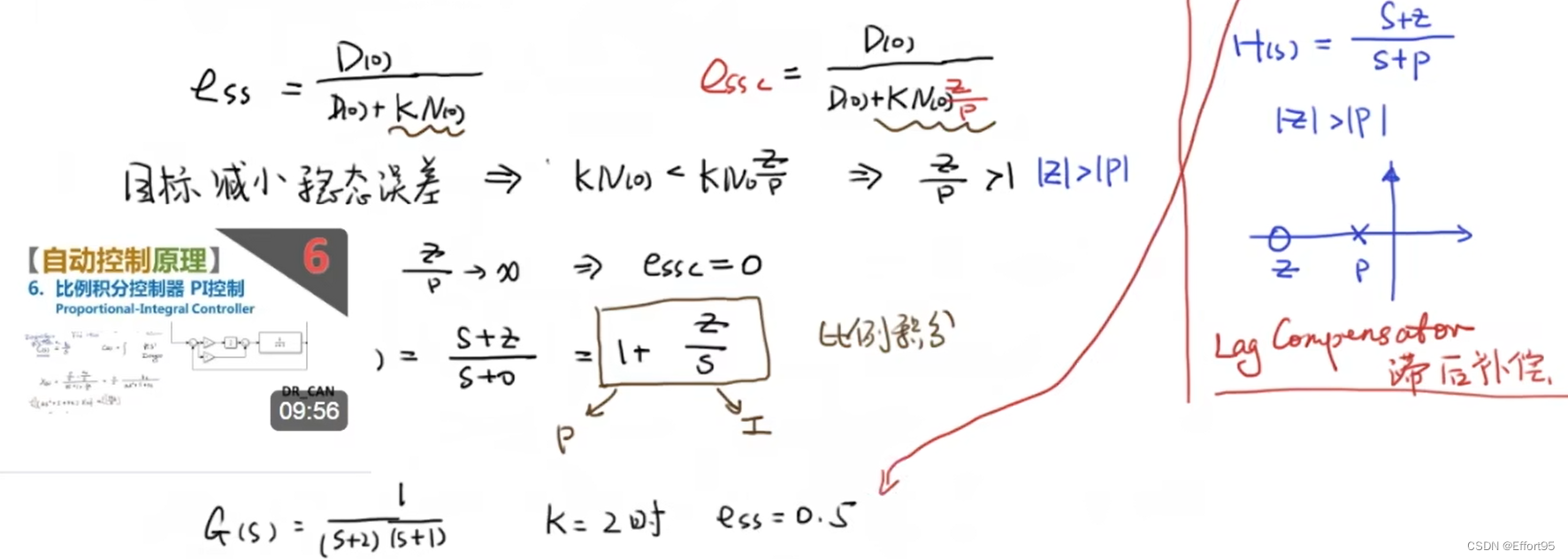
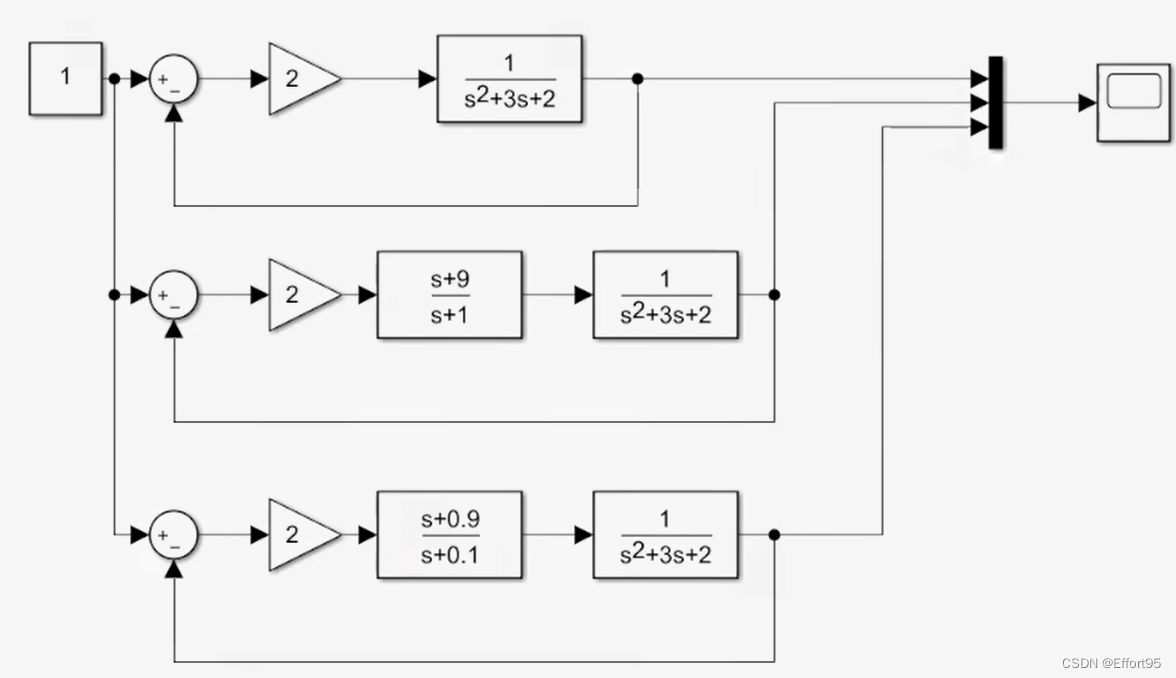
 文章探讨了控制系统中的核心概念,包括开环与闭环系统的稳定性,通过传递函数的极点位置分析系统稳定性。利用Matlab/Simulink进行系统分析,介绍了比例、比例积分控制器以及根轨迹绘制方法。此外,文章还涉及超前、滞后补偿器的设计以及奈奎斯特稳定性判据和拉普拉斯变换在控制工程中的应用。
文章探讨了控制系统中的核心概念,包括开环与闭环系统的稳定性,通过传递函数的极点位置分析系统稳定性。利用Matlab/Simulink进行系统分析,介绍了比例、比例积分控制器以及根轨迹绘制方法。此外,文章还涉及超前、滞后补偿器的设计以及奈奎斯特稳定性判据和拉普拉斯变换在控制工程中的应用。
文章探讨了控制系统中的核心概念,包括开环与闭环系统的稳定性,通过传递函数的极点位置分析系统稳定性。利用Matlab/Simulink进行系统分析,介绍了比例、比例积分控制器以及根轨迹绘制方法。此外,文章还涉及超前、滞后补偿器的设计以及奈奎斯特稳定性判据和拉普拉斯变换在控制工程中的应用。
文章探讨了控制系统中的核心概念,包括开环与闭环系统的稳定性,通过传递函数的极点位置分析系统稳定性。利用Matlab/Simulink进行系统分析,介绍了比例、比例积分控制器以及根轨迹绘制方法。此外,文章还涉及超前、滞后补偿器的设计以及奈奎斯特稳定性判据和拉普拉斯变换在控制工程中的应用。





















































07-13
 1208
1208
1208
09-22
1万+
1万+
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









