







 旋转编码器是将旋转机械位移量转换为电器信号,对该信号进行处理后检测位置,速度等的传感器旋转编码器可分为 “增量式”编码器和 “绝对值”式编码器1.增量式编码器旋转盘转动时,光敏二极管断续收到发光二极管发出的光,从而输出方波增量式编码器通过对产生的方波脉冲进行计数来检测角度,增量式编码器有3个相分别为 A相 B相 Z相正转时A相超前B相90°,反之反转时B相超前A相90°通过判...
旋转编码器是将旋转机械位移量转换为电器信号,对该信号进行处理后检测位置,速度等的传感器旋转编码器可分为 “增量式”编码器和 “绝对值”式编码器1.增量式编码器旋转盘转动时,光敏二极管断续收到发光二极管发出的光,从而输出方波增量式编码器通过对产生的方波脉冲进行计数来检测角度,增量式编码器有3个相分别为 A相 B相 Z相正转时A相超前B相90°,反之反转时B相超前A相90°通过判...
旋转编码器是将旋转机械位移量转换为电器信号,对该信号进行处理后检测位置,速度等的传感器
旋转编码器可分为 “增量式”编码器和 “绝对值”式编码器
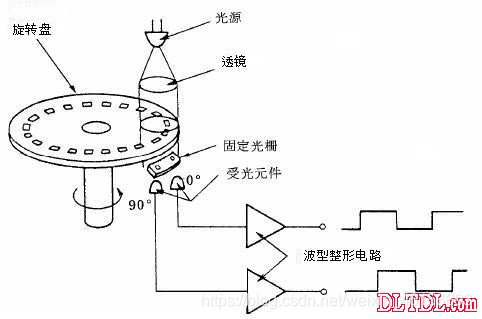
1.增量式编码器
旋转盘转动时,光敏二极管断续收到发光二极管发出的光,从而输出方波
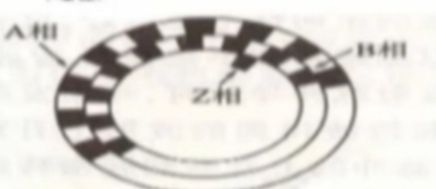
增量式编码器通过对产生的方波脉冲进行计数来检测角度,增量式编码器有3个相分别为 A相 B相 Z相
正转时A相超前B相90°,反之反转时B相超前A相90°
通过判断AB相的位置可以判断编码器的正反转
Z相则为原点信号,通过记录Z相可以记录转盘转动的圈数
通过对3相的记录则可达到记录转盘转动的角度
每转一个刻度AB相输出一个脉冲(转一圈会一个脉冲产生很多脉冲,具体由编码器型号决定),每转一圈Z相输出一个脉冲
2.绝对值式编码器
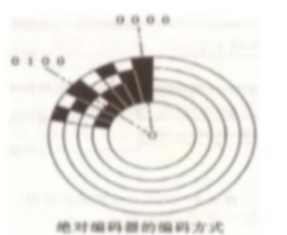
绝对值式编码器的每一相都
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4026
4026











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









