







前言
超宽带(Ultra-wideband,UWB)是一种具备低耗电与高速传输的无线个人区域网络通信技术,适合需要高质量服务的无线通信应用,可以用在无线个人区域网络、家庭网路连接和短距离雷达等领域。它不采用连续的正弦波,而是利用脉冲信号来传送。
UWB是无载波通信技术,利用纳秒(ns)至皮秒(ps)级的非正弦波窄脉冲传输数据,而时间调变技术令其传送速度可以大大提高,而且耗电量相对地低,并有较精确的定位能力。与常见的通信使用的连续载波方式不同,UWB采用极短的脉冲信号来传送数据。这些脉冲所占用的带宽甚至达到几GHz,因此最大数据传输速率可以达到几百Mbps。因为使用的是极短脉冲,在高速通信的同时,UWB设备的发射功率却很小,仅仅只有目前的连续载波系统的几百分之一。UWB 可用于实时定位系统,其精度能力和低功耗使其非常适合于对射频敏感的环境,例如医院。UWB 也可用于点对点精细测距,这允许基于两个实体之间的相对距离的许多应用程序。
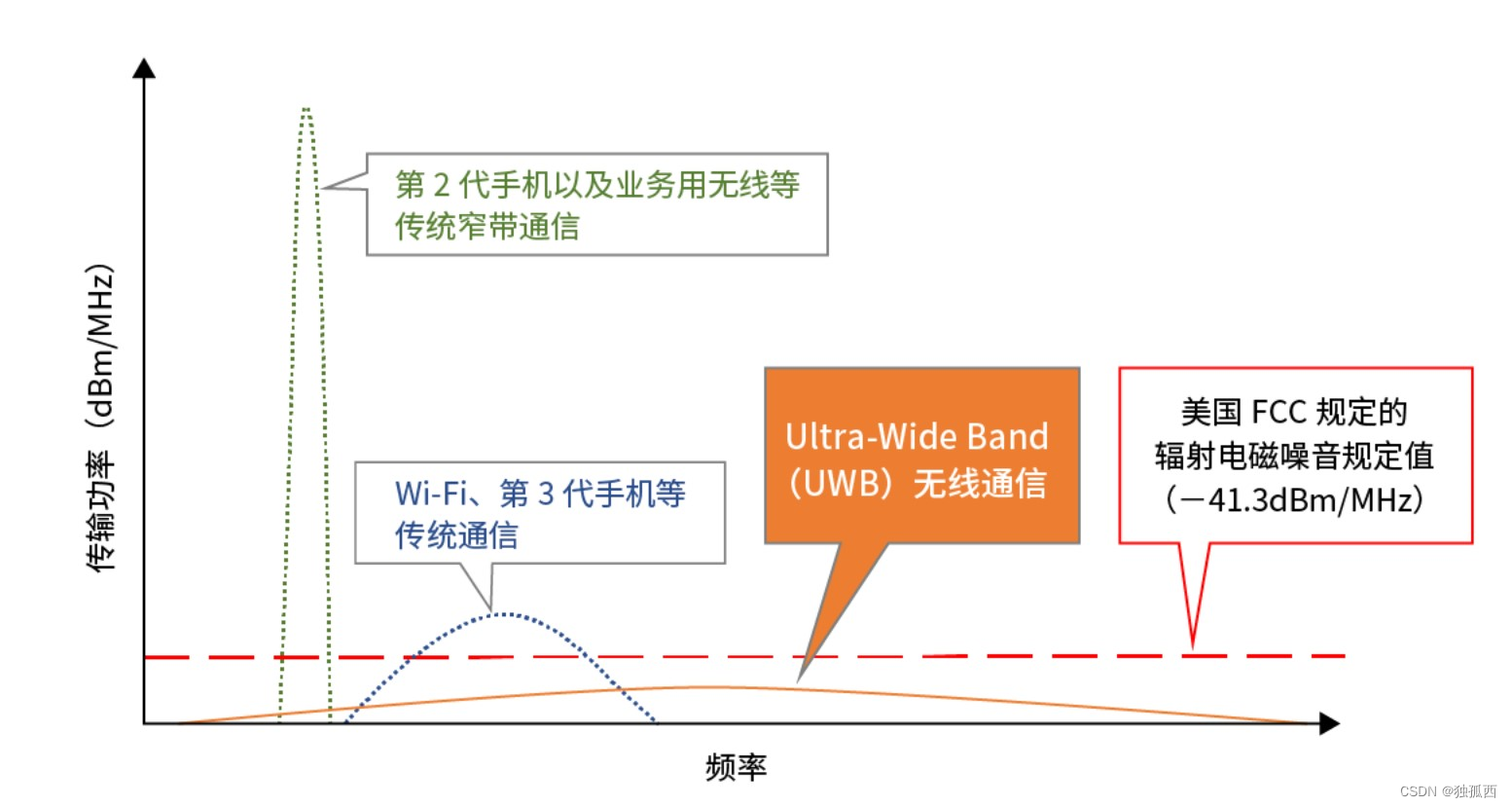
图1 UWB无线通信方式与其他通信方式的功率谱密度带宽定性比较示意图
UWB技术历史发展介绍
最早可以追溯到一百多年前波波夫和马克尼发明越洋无线电报的时代。1964~1987年,Harmuth的著作奠定了UWB收发信机的设计基础;Ross及Robbins的美国专利于1974年发表,是UWB通信方面最早的里程碑式专利。
上世纪60年代,UWB原本用于军事用途;脉冲UWB技术在1989年被美国国防部确定为超宽带(UWB)技术。直到2002年美国联邦通信委员会(FCC)才发布商用化规范。摩托罗拉2005年7月8日已经在台湾成立亚洲第一座超宽频无线通信研发中心。2007年3月,ISO正式通过了WiMedia联盟提交的MB-OFDM标准,正式成为了UWB技术的第一个国际标准。
与国外先进国家相比,我国的UWB研发起步相对较晚。从1999年开始,我国研究者开始关注UWB技术的发展。2001年,国家“863”计划启动了高速UWB实验演示系统的研发项目,经过遴选,由东南大学、清华大学、中国科技大学分别进行研发,各自提出方案,分别于2005年12月和2006年4月完成并通过验收。在2011年的中国国际信息通信展览会上,深圳国人通信有限公司推出了超宽带数字光纤分布系统(UW-DDS ),这是可实现多制式多业务共同接入、协同发展以及共建共享的最新解决方案,已在国家大剧院等处应用并获得巨大成功。
到2019年之后,UWB才广为公众所知。引发这一现象的是配备UWB模块的智能手机的问世。由此,在过去未将UWB用于民用目的的国家,使用许可也取得了进展。
UWB技术就是这样发展起来的,如果特别关注频率带宽规定的话,会发现FCC分配的UWB无线电频率带宽是3.1GHz-10.6GHz之间的7.5GHz。另一方面,欧盟、欧亚大陆、东亚、大洋洲等国家和地区分配的带宽与此略有不同,其规定是在室内和室外主要能使用6.0GHz-9.0GHz左右的带宽。然而,目前大多数UWB模块遵守的是IEEE(Institute of Electrical and Electronic Engineers:电气与电子工程师协会)*3在 2007年采用的短距离无线标准IEEE802.15.4a中指定UWB优先使用通道号9(中心频率:7987.2MHz,频率带宽:499.2MHz)的规格。
定位原理介绍
作为使用UWB无线通信的定位方法,代表性的方法是将配备UWB功能的智能手机等终端或工业用UWB 锚点、通过UWB标签之间的ToF(Time of Flight)进行的测距以及通过AoA(Angle of Arrival)进行的测量角度进行组合。UWB 的定位技术有 TOA 法、TDOA 法和 PDOA 法等。
(1) TOF(Time of Flight飞行时间):
以基站为圆心,以标签和基站距离为半径画圆,相交区域即为标签位置。标签和基站间的距离是通过多次收发脉冲测量。
优点:算法简单、精度较高
缺点:标签费电、系统容量小
(2) TDOA(Time Difference of Arrival):
基站彼此需高精度时间同步,标签定时广播,根据标签广播信号到达不同基站的时间差值画出双曲线,相交区域即为标签位置。
优点:标签省电、系统容量大
缺点:基站需高精度时间同步、包络线外精度低
(3) AOA/PDOA(Angle of Arrival):
标签的广播信号到达不同基站角度连线的交点,就是标签的位置。
优点:需要基站数量少
缺点:准确测量角度困难,信号遮挡敏感
通过ToF(Time of Flight)进行的测距
通过使用UWB无线通信的ToF(Time of Flight)技术进行测距的原理是:通过测量从消息(信号)发送到接收的时间来计算到物体的距离。具体而言就是UWB发射器发送短脉冲信号,接收器接收该信号。从发送到接收所需的时间称为ToF。
使用ToF技术的UWB测距可以根据电磁波的速度(光速)和所需的时间来计算距离。具体而言就是用所需时间和光速的乘积求出距离。可以通过UWB的超宽带特性利用短脉冲信号,因此,可以获得很高的时间分辨率和测量精度。由此,在传感和定位应用中可有望得高精度的测量结果,因此已被应用于各式各样的领域。
UWB测距技术主要有2种手法:SS-TWR(Single-Sided Two-Way Ranging)和DS-TWR(Double-Sided Two-Way Ranging)。这些手法采用不同的方法通过信号往返进行距离测量。
SS-TWR是一种仅由一方的设备测量往返时间的方法。在这种手法中,设备A向设备B发送信号,设备B收到该信号后,向设备A发送回复信号。设备A测量从发送到接收所花费的时间并计算往返时间。此方法仅使用设备A就能进行测量,但需要两个设备的时钟同步。
DS-TWR是一种用两台设备测量往返时间并共享结果的方法。在这种手法中,设备A向设备B发送信号,设备B收到该信号后,向设备A发送回复信号。设备 A和设备B分别测量各自从发送到接收所需要的时间,并使用这些结果计算往返时间。这种方法不需要时钟同步,因此测量更容易,精度更高。
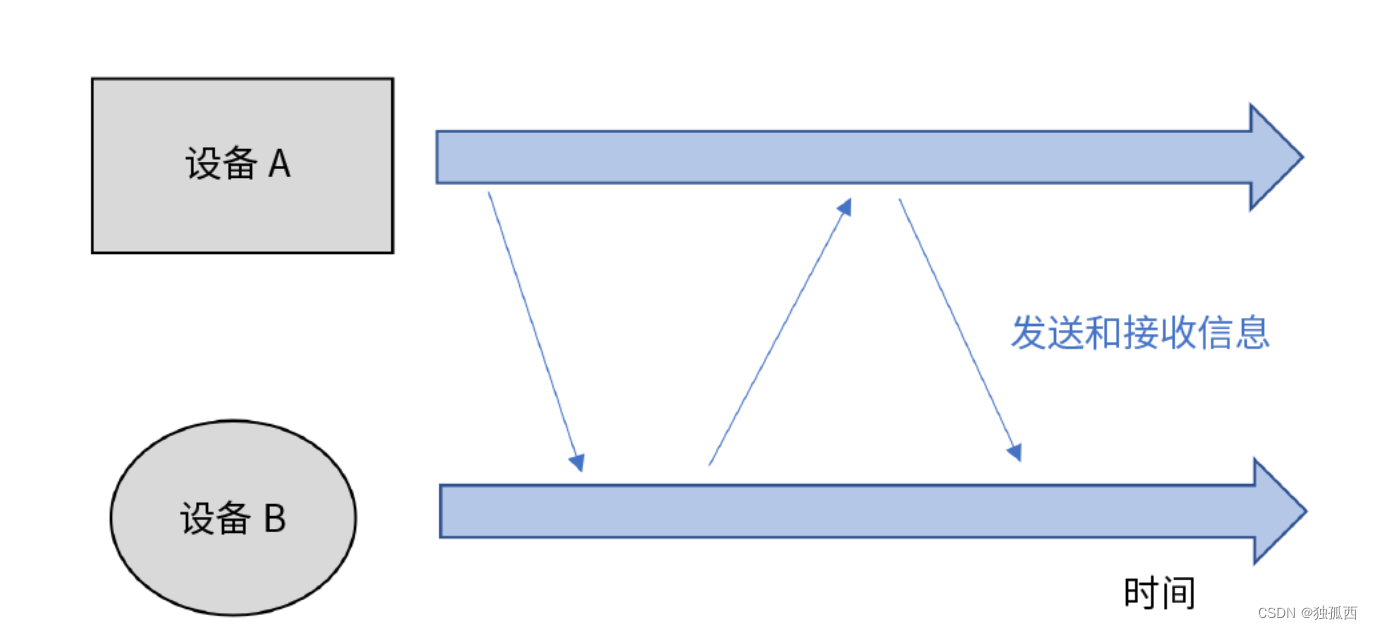
图2 UWB中通过ToF(DS-TWR)进行测距的示意图
通过AoA(Angle of Arrival)进行的角度测量
AoA是一种计算从设备A看到的设备B放置方向的角度的方法。如图4所示,UWB无线中通过AoA进行的角度测量的原理是:设备B发射的电波被设备A的多根天线接收,并且根据接收的电波的相位差计算角度。使用这种方法,能通过用2根天线进行的角度测量(2D AoA)进行平面定位,以及通过用3根天线进行的角度测量(3D AoA)进行三维定位。
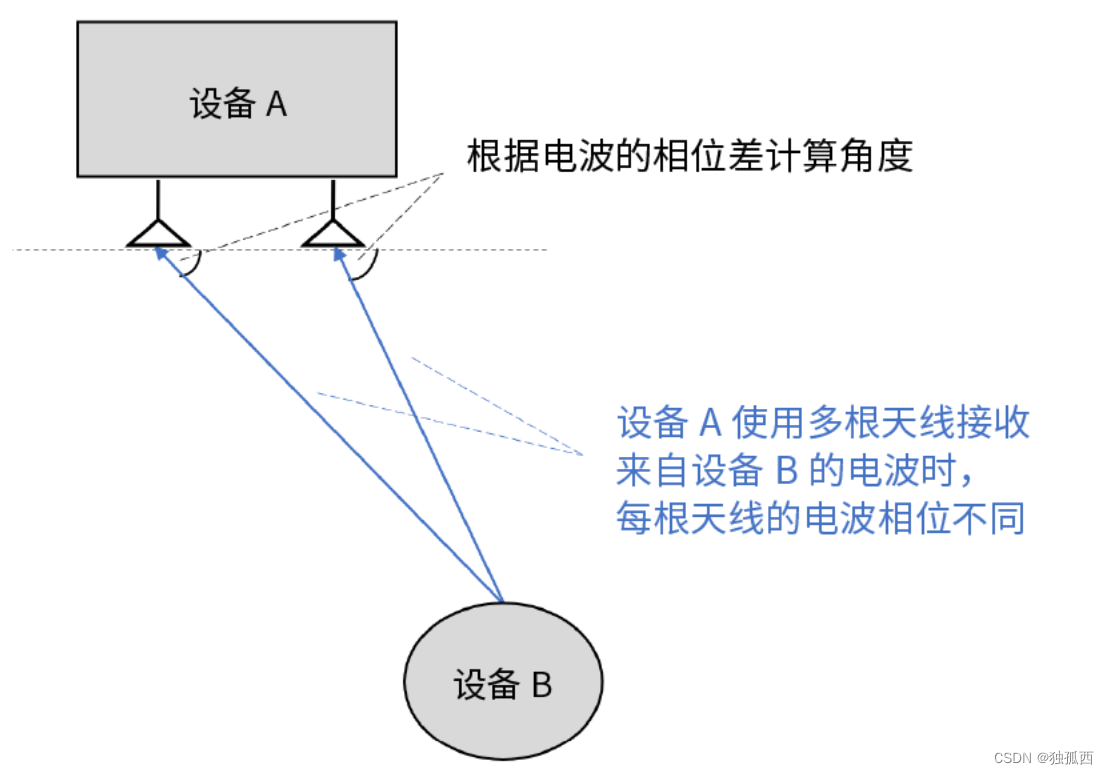
图3 UWB无线中的AoA(2D AoA)示意图
通过TDOA(Time Difference of Arrival)进行的三维定位
到达时间差(Time Difference of Arrival,TDOA)是一种利用到达时间差进行定位的方法又称为双曲线定位。标签卡对外发送一次UWB信号,在标签无线覆盖范围内的所有基站都会收到无线信号,如果有两个已知坐标点的基站收到信号,标签距离两个基站的间隔不同,那么这两个基站收到信号的时间点是不一样的。室内三维空间定位需要 4 个及以上基站。
TDOA 是基于到达时间差定位,系统中需要有精确时间同步功能。TDOA 的首要问题是解决时间同步问题,时间同步有两种,
一种是通过有线做时间同步,有线时间同步可以控制在0.1ns 以内,同步精度非常高,但由于采用有线,所有设备要么采用中心网络的方式,要么采用级联的方式,但增加了网络维护的复杂度,也增加了施工的复杂度,成本升高。并且,系统中还有一个专用的有线时间同步器,价格昂贵。
一种是通过无线做时间同步,采用无线同步一般可以达到0.25ns,精度稍逊于有线时间同步,但其系统相对来说更为简单,定位基站只需要供电,数据回传可以采用WiFi 的方式,有效降低了成本,基站时间同步之后,标签发送一个广播报文,基站收到之后,标记接收到此报文的时间戳,将才内容发送到计算服务器,计算服务器更加其他基站的定位报文的时间戳,计算出被定为目标的位置。
定位应用上的限制与不足
在当前超宽带(ultra wide band,UWB)室内定位系统中,由于室内环境的复杂多变,不可避免地引入了测量噪声和非视距(Non-Line ofSight,NLOS)误差。二者是求解定位过程中的主要误差来源,尤其是NLOS误差已经成为影响定位精度的关键性因素,较大的NLOS误差往往会导致超宽带室内定位系统的定位性能急剧下滑,尤其是在三维定位系统中,传统定位算法不能满足实际定位需求。
1 传感器布设方式对定位精度的影响
在实际的定位精度解算过程中,传感器个数增多意味着冗余信息的增多,丰富的冗余信息可以进一步地减小定位误差。但是定位精度并不会随着传感器最佳不断增大,当传感器增加到一定数量后,继续增加传感器对定位精度的贡献并不大。并且传感器个数的增加意味着设备代价的加大。因此怎样在传感器个数和定位精度之间找到平衡从而合理布设UWB传感器是研究传感器布设对定位精度影响的重点。
2 多路径效应的影响
UWB超宽带定位信号在传播过程中会受到周围环境如墙壁、玻璃和桌面等室内物品的反射和折射,产生多路径效应。信号在延迟、幅值和相位等方面的变化,从而产生能量衰减,信噪比下降,导致首达信号并非直达信号,引起测距误差,定位精度也随之下降。因此,有效地抑制多路径效应可以提高定位精度,目前抑制多径的方法主要有MUSIC、ESPRIT和边缘检测等技术。
3 NLOS影响
视距传播(LOS)是保证信号测量结果准确的首要和前提条件,当移动定位目标和基站之间不能满足条件时,信号的传播只能在折射和衍射等非视距条件下完成。此时首达脉冲的时间并不代表TOA的真实值,首达脉冲的方向也不是AOA的真实值,这样就会造成一定的定位误差。目前消除非视距误差的方法主要有Wylie法和相关消除法。
4 人体对定位精度的影响
人体的主要成分是水,水对UWB无线脉冲信号具有较强的吸收作用,导致信号强度衰减,测距信息存在偏差,影响最终的定位效果。
5 信号穿透减弱的影响
任何信号穿透墙体等实体时都会减弱,UWB也不例外。当UWB穿透普通的砖墙时信号会减弱将近一半左右。因穿透墙体引起的信号传输时间的变化也会影响定位精度。
UWB探讨
UWB估计三维位置的算法有很多种,求解 TDOA 方程组的本质就是求解一组非线性方程组,因此可以利用多种非线性优化方法进行尝试。
UWB作为全局传感器,在室内定位中相当于室外GPS的作用,因此和自主性传感器是非常互补的,与相机、惯导等进行融合定位是近几年比较火热的研究领域。
针对UWB定位本身,
1、根据目前多数研究的测距改正模型及定位方法都是在接近理想环境下的,实际室内环境存在多源误差影响,特别容易出现非视距误差,下一步研究可以针对非视距误差的识别和消除方法。
2、在定位估计中在求解定位结果的基础之上,对结果的精度估计和可用性分析也非常要,因此可以考虑研究 UWB 定位中的随机模型,结合方差分量估计,合理确定观测值精度和权。
3、实际室内定位过程中,人体运动规律复杂多变,需要进一步考虑研究自适应滤波抵抗目标运动状态的动力学模型误差。
4、定位模型及参数估计方法研究基于经典平差的最小二乘估计准则,对估计参数的分布没有限制,因此,在病态构型下,尽管偏差很小,但是会导致很大的方差,可以考虑研究岭估计方法,其对待估参数进行先验分布限制,综合权衡了误差和方差。
5、目前基站优化布设仅考虑了几何空间下的 GDOP 最小化,实际中基站测量精度是不尽相同的,最佳的 GDOP 值应是一个带约束条件的组合优化问题的最优值,此外,在实际传感器网络优化布中,需要在一定精度、可靠性和费用等多种质量指标下的目标函数,因此,考虑进一步研究控制网优化设计问题,提高基站布设效率。
6、 UWB 定位方法的研究主要结合测量平差和导航定位的理论基础,然而不同 UWB 硬件设备的特性也不同,并且,UWB 信号传播过程的衰减特性、频率和带宽对测距定位的影响也非常重要,可以考虑研究 UWB信号本身的传输特性及信道模型。
参考
• 什么是UWB(超宽带)无线通信?https://article.murata.com/zh-cn/article/what-is-uwb-wireless-communication
• UWB 技术原理与应用详解https://blog.csdn.net/wutao22/article/details/115391392
•UWB定位系统的主要误差来源是什么? - 云酷科技智慧安全的回答 - 知乎https://www.zhihu.com/question/362754936/answer/1327543063
•UWB 定位方法及构型优化研究,王川阳
•网络资料


















 1561
1561

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











