







在视觉惯性系统中,预积分目前是处理惯性传感器的最常用的方法,效果也非常不错。预积分的理论推导部分比较复杂,这次学习我也只是了解了大概,还没有手推一遍,这次主要为了会用,等之后实践经验足后一定要手推一边公式加强理解。
参考资料主要是
1、高翔:自动驾驶与机器人中的SLAM技术:第四章预积分学
2、邱笑晨:预积分总结与公式推导:https://github.com/PetWorm/IMU-Preintegration-Propogation-Doc.git
3、CSDN中的相关博客
1、预积分的定义:
我们不妨假设从关键帧i 和j之间的IMU数据被累计起来(i j之间采用普通积分,不做优化),这个过程通常可以持续若干秒钟。这种被累计起来的观测被称为预积分。
SLAM系统中为了减小优化求解器的负担,采用了关键帧策略,IMU的速率显然要快于关键帧的插入,紧耦合的方式要求共同使用IMU和图像的信息来估计状态量,预积分来协调两者关系:通过重新参数化,把关键帧之间的IMU测量值积分成相对运动的约束,避免了因为初始条件变化造成的重复积分,在下一个关键帧到来之前先对IMU数据积分,谓之预积分。
2、为什么要预积分:
在后端非线性优化的时候,需要优化位姿,每次调整位姿都需要在它们之间重新传递IMU测量值,需要重新积分,这将非常耗时,为了避免重新传递测量值,所以采取预积分策略。
在优化求解的时候,有i、j相邻两关键帧,关键帧i的位姿是相对于世界系而言的,如果直接利用IMU、加速度计示数在关键帧i的位姿上继续进行积分得到j相对于世界坐标系的位姿变换,那么迭代优化时,i的位姿变化了以后,就需要重新进行积分了。而预积分解算的是两帧间的相对位姿,就不用全部重新进行积分,减轻了计算压力。
3、公式推导思路概述
(详细推导可以去参考资料看看,尤其是邱笑晨:预积分总结与公式推导非常详细)
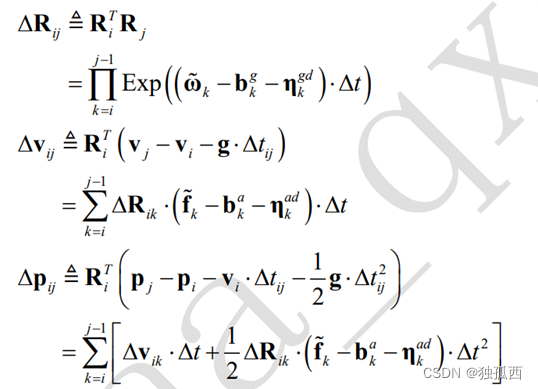
(1)推导测量模型:
在一个IMU系统里,我们考虑它的五个变量:旋转、平移、角速度、线速度与加速度。最终推导得到理想的预积分值:
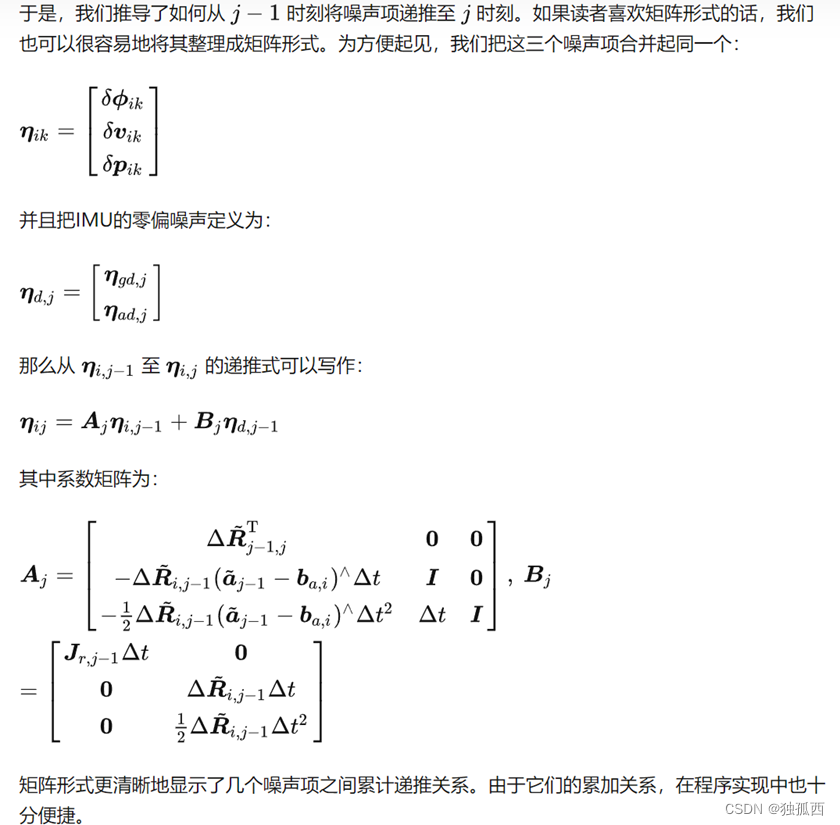
(2)噪声分离:
将噪声项从预积分理想值中分离出来,使得预积分测量值(由IMU测量数据计算得到)具有理想值“加”白噪声的形式。

(3)噪声项递推关系:
由于噪声项的定义比较复杂,会使用同样的思路来处理各种噪声项,我们会将复杂的噪声项线性化,保留一阶项系数,然后推导线性模型下的协方差矩阵变化。
(4)零偏更新时的预积分测量值更新:
假定预积分观测是随零偏线性变化的。
更新公式:
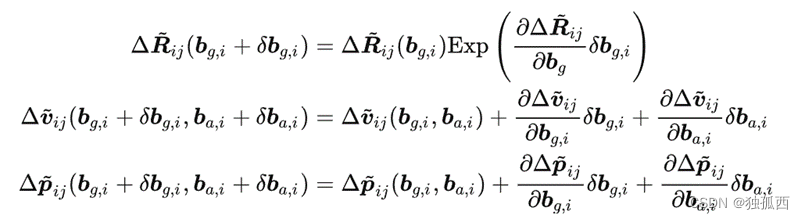
偏导项计算:
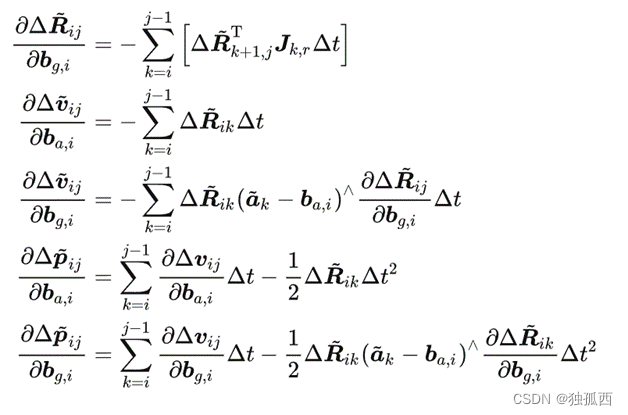
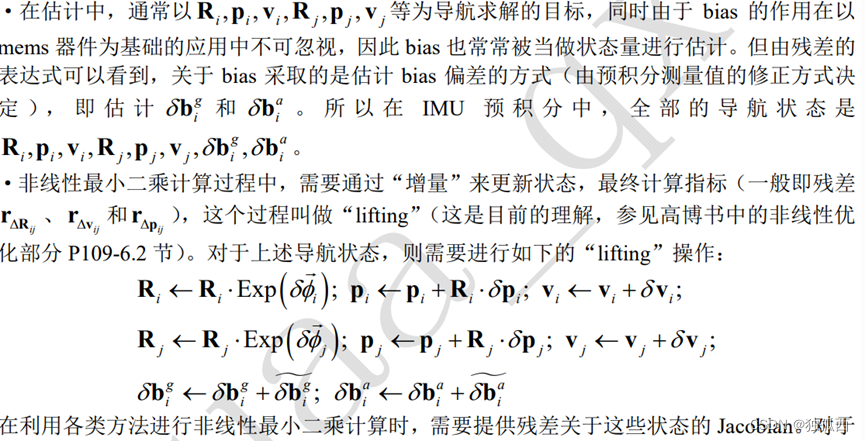
(5)预积分的雅可比矩阵:
残差指的是预积分计算值(由非 IMU 的其他方式猜测/估计的预积分值)与测量值的差别。在进行 optimization 时,将对所有待优化的导航状态进行 lifting(可以理解为“更新”),从而影响预积分计算值和预积分测量值,进而改变残差值,optimization 的最终目的是要使残差(的加权范数)最小。


然后可以参考邱笑晨的文档,剩下的部分就是推导R,V,P的雅可比矩阵,比较多这里就不粘贴了。
4、代码实践
(这部分参考自动驾驶与机器人中的SLAM技术)
基本预积分类实现:
class IMUPreintegration {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
/// 参数配置项
/// 初始的零偏需要设置,其他可以不改
struct Options {
Options() {}
Vec3d init_bg_ = Vec3d::Zero(); // 初始零偏
Vec3d init_ba_ = Vec3d::Zero(); // 初始零偏
double noise_gyro_ = 1e-2; // 陀螺噪声,标准差
double noise_acce_ = 1e-1; // 加计噪声,标准差
};
IMUPreintegration(Options options = Options());
/**
* 插入新的IMU数据
* @param imu imu 读数
* @param dt 时间差
*/
void Integrate(const IMU &imu, double dt);
/**
* 从某个起始点开始预测积分之后的状态
* @param start 起始时时刻状态
* @return 预测的状态
*/
NavStated Predict(const NavStated &start, const Vec3d &grav = Vec3d(0, 0, -9.81)) const;
/// 获取修正之后的观测量,bias可以与预积分时期的不同,会有一阶修正
SO3 GetDeltaRotation(const Vec3d &bg);
Vec3d GetDeltaVelocity(const Vec3d &bg, const Vec3d &ba);
Vec3d GetDeltaPosition(const Vec3d &bg, const Vec3d &ba);
public:
double dt_ = 0; // 整体预积分时间
Mat9d cov_ = Mat9d::Zero(); // 累计噪声矩阵
Mat6d noise_gyro_acce_ = Mat6d::Zero(); // 测量噪声矩阵
// 零偏
Vec3d bg_ = Vec3d::Zero();
Vec3d ba_ = Vec3d::Zero();
// 预积分观测量
SO3 dR_;
Vec3d dv_ = Vec3d::Zero();
Vec3d dp_ = Vec3d::Zero();
// 雅可比矩阵
Mat3d dR_dbg_ = Mat3d::Zero();
Mat3d dV_dbg_ = Mat3d::Zero();
Mat3d dV_dba_ = Mat3d::Zero();
Mat3d dP_dbg_ = Mat3d::Zero();
Mat3d dP_dba_ = Mat3d::Zero();
};
单个IMU积分函数:
void IMUPreintegration::Integrate(const IMU &imu, double dt) {
// 去掉零偏的测量
Vec3d gyr = imu.gyro_ - bg_; // 陀螺
Vec3d acc = imu.acce_ - ba_; // 加计
// 更新dv, dp, 见(4.13), (4.16)
dp_ = dp_ + dv_ * dt + 0.5f * dR_.matrix() * acc * dt * dt;
dv_ = dv_ + dR_ * acc * dt;
// dR先不更新,因为A, B阵还需要现在的dR
// 运动方程雅可比矩阵系数,A,B阵,见(4.29)
// 另外两项在后面
Eigen::Matrix<double, 9, 9> A;
A.setIdentity();
Eigen::Matrix<double, 9, 6> B;
B.setZero();
Mat3d acc_hat = SO3::hat(acc);
double dt2 = dt * dt;
// NOTE A, B左上角块与公式稍有不同
A.block<3, 3>(3, 0) = -dR_.matrix() * dt * acc_hat;
A.block<3, 3>(6, 0) = -0.5f * dR_.matrix() * acc_hat * dt2;
A.block<3, 3>(6, 3) = dt * Mat3d::Identity();
B.block<3, 3>(3, 3) = dR_.matrix() * dt;
B.block<3, 3>(6, 3) = 0.5f * dR_.matrix() * dt2;
// 更新各雅可比,见式(4.39)
dP_dba_ = dP_dba_ + dV_dba_ * dt - 0.5f * dR_.matrix() * dt2; // (4.39d)
dP_dbg_ = dP_dbg_ + dV_dbg_ * dt - 0.5f * dR_.matrix() * dt2 * acc_hat * dR_dbg_; // (4.39e)
dV_dba_ = dV_dba_ - dR_.matrix() * dt; // (4.39b)
dV_dbg_ = dV_dbg_ - dR_.matrix() * dt * acc_hat * dR_dbg_; // (4.39c)
// 旋转部分
Vec3d omega = gyr * dt; // 转动量
Mat3d rightJ = SO3::jr(omega); // 右雅可比
SO3 deltaR = SO3::exp(omega); // exp后
dR_ = dR_ * deltaR; // (4.9)
A.block<3, 3>(0, 0) = deltaR.matrix().transpose();
B.block<3, 3>(0, 0) = rightJ * dt;
// 更新噪声项
cov_ = A * cov_ * A.transpose() + B * noise_gyro_acce_ * B.transpose();
// 更新dR_dbg
dR_dbg_ = deltaR.matrix().transpose() * dR_dbg_ - rightJ * dt; // (4.39a)
// 增量积分时间
dt_ += dt;
}
















 4119
4119











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











