







本文仅用于记录自己学习总结。记录IMU预积分推导过程,不包含具体原理。
符号表示
R
R
R: 表示旋转矩阵
v
v
v: 表示速度
p
p
p: 表示位移
E
x
p
Exp
Exp: 指数映射,将旋转向量映射为旋转矩阵
w
~
\widetilde{w}
w
: 角速度观测值
f
~
\widetilde{f}
f
: 加速度观测值
b
g
,
b
a
b^g, b^a
bg,ba: 角速度、加速度的噪声
η
g
d
,
η
a
d
\eta^{gd},\eta^{ad}
ηgd,ηad: 角速度、加速度的随机游走
角标
i
,
j
,
k
i,j,k
i,j,k: 某几个时刻(的IMU坐标系)
角标
w
w
w: 世界坐标系
Δ
t
,
Δ
t
i
j
\Delta t, \Delta t_{ij}
Δt,Δtij: 离散时间间隔,ij之间的总时间间隔
IMU直接积分
IMU直接积分为,根据
i
i
i时刻的角度、速度、位移,推导
j
j
j时刻的角度、速度、位移。公式如下:
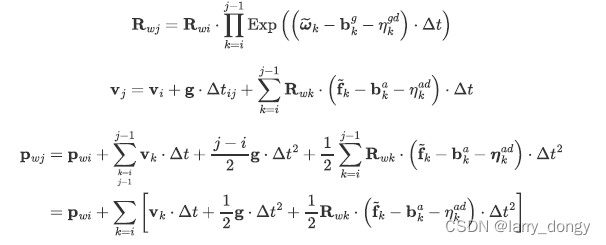
具体推导过程如下。推导过程中省略了噪声项
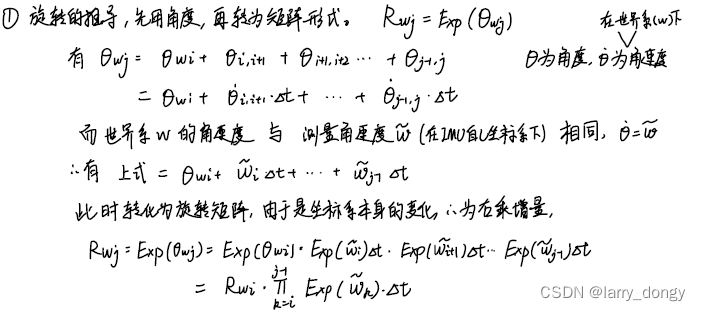
(1)旋转的推导
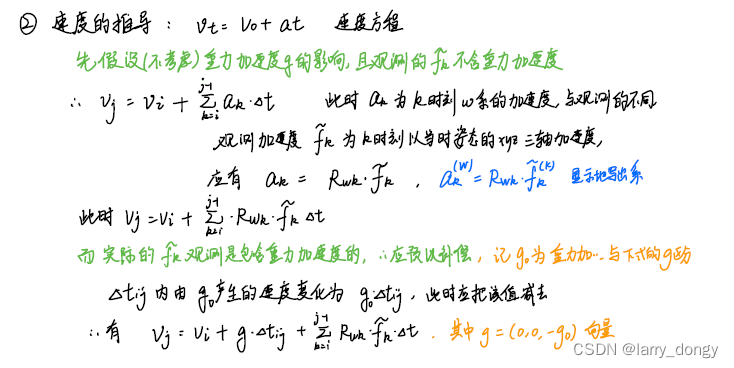
(2)速度的推导
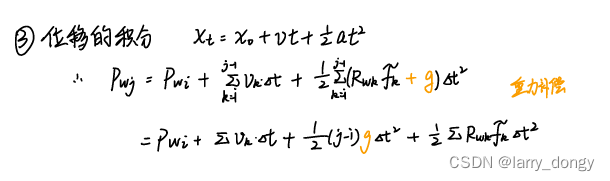
(3)位移的积分:
预积分的全部公式:
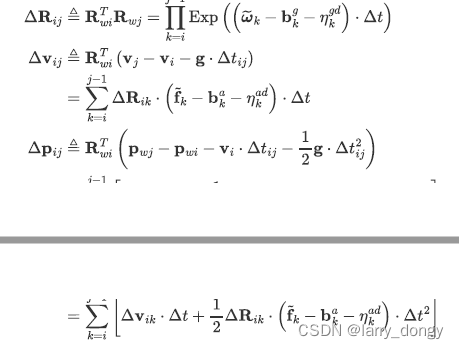
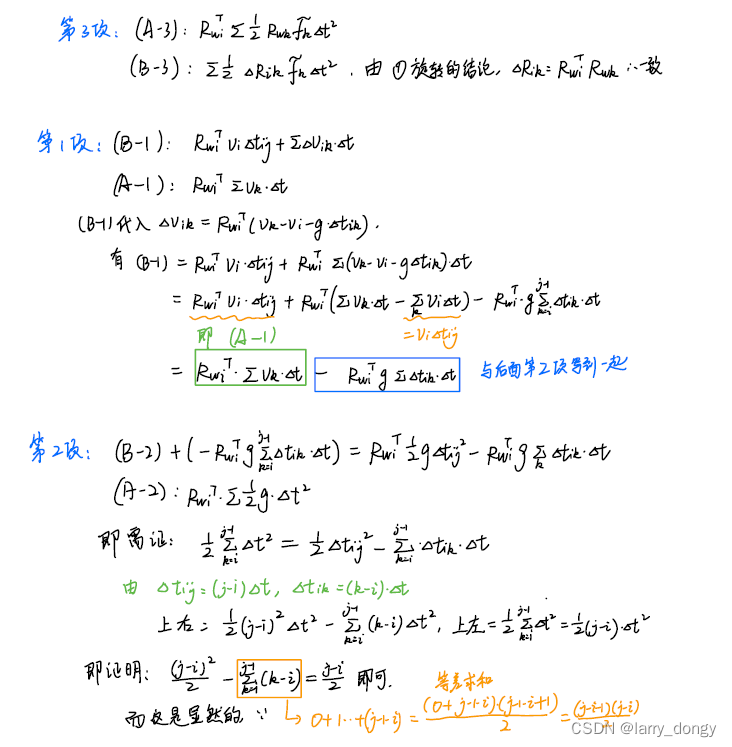
预积分的推导过程
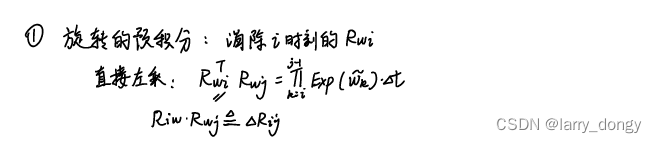
(1)旋转项的预积分:
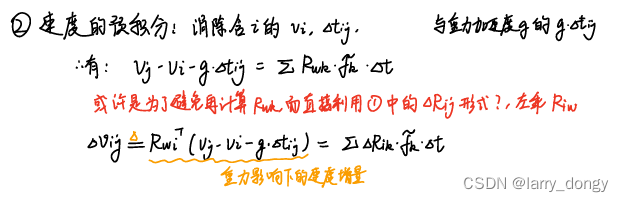
(2)速度项的预积分:
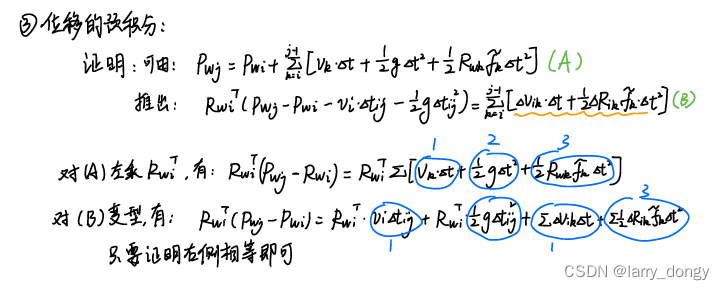
(3)位移项的预积分:
小结
终于下定决心推到一遍,算是自己推出来了。虽然不太理解具体含义及操作原因,但后面慢慢来。















 4119
4119











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









