







基本介绍:永磁同步电机超前角弱磁控制,切换弱磁的过程较为平滑,主要原理是通过电压反馈,得到偏转角度theta,并通过id=iscos(theta)的方式控制弱磁电流。该弱磁控制为一个多闭环系统,由两个电流环、一个电压闭环和一个转速外环构成。电流环可以使电机具有较好的动态性能,当负载转矩发生突变时使系统仍能够较稳定的运行:转速外环控制可以达到无差控制的目的:电压环的作用是当电机转速超过转折速度时,可以输出一个负的超前角,从而产生一个反向的去磁电流,同时减小交轴电流,使电机稳定运行在弱磁区域。此外,电机从恒转矩区向弱磁区域的过渡是通过电压环自动改变超前角
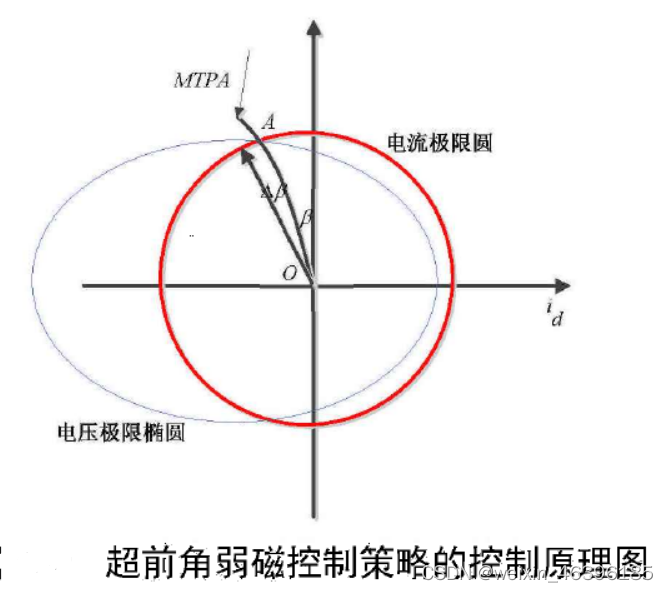
来实现的,切换较为平滑切换过程中电机的转速和转矩波动较小。
实现方法:电流调节器输出Ud和Uq经过低通滤波后,作为弱磁环节的控制输入量,并且和逆变器输出的最大电压Umax=Udc/sqrt(3)进行对比,二者的差值作为弱磁环PI调节器的输入,输出超前角度大小,超前角范围是-pi/2~0。通过超前角的大小控制输出的id和iq大小(注意此时转速环输出的是is)。
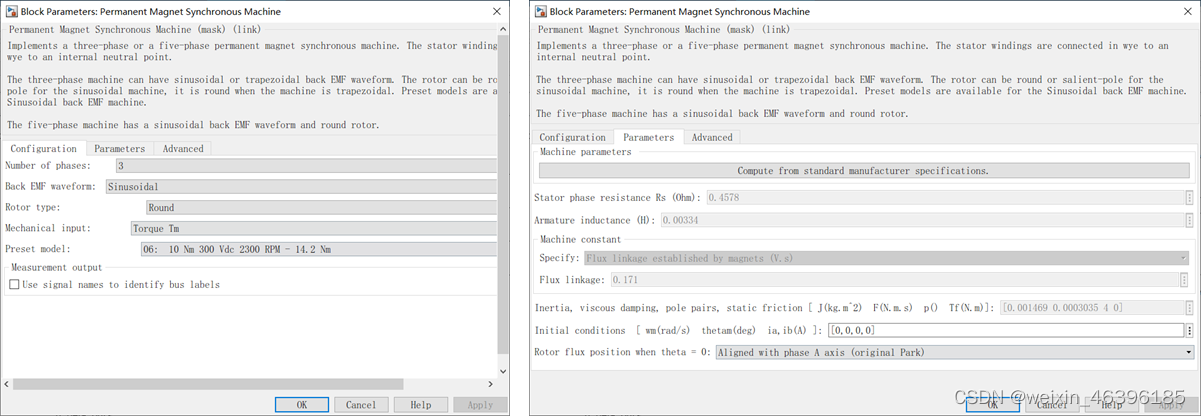
电机参数:选取MATLAB2021a自带电机参数额定转矩10N.m,300Vdc,最大转矩14.2N.m,额定转速2300r/min(限制在该转速范围内),表贴式电机,电感为0.00334H,转子磁链为0.171wb。
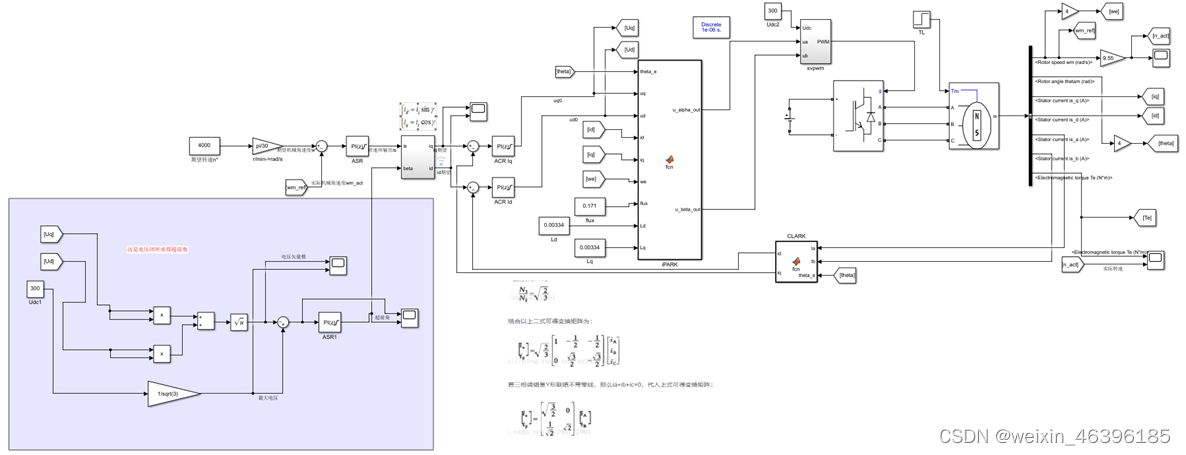
仿真框图:
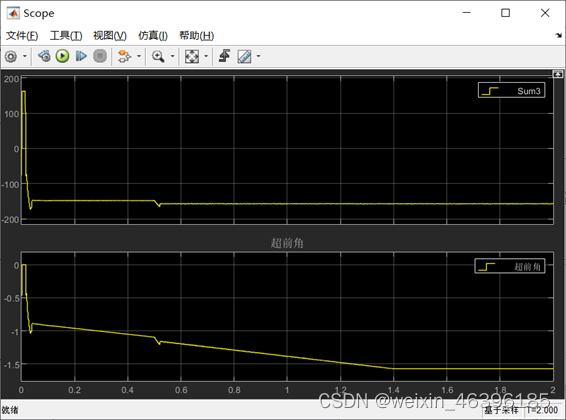
控制效果:(1)给定一个期望的电机转速为4000r/min,超过电机的额定转速2300r/min,经过PI参数调节后,从电机弱磁超前角曲线,可以看出角度在一开始为恒转矩区,超前角为0,在0.05s之后电机进入到弱磁区域,且它始终在-pi/2~0范围内,跟一开始的设定范围一样。仿真见下。
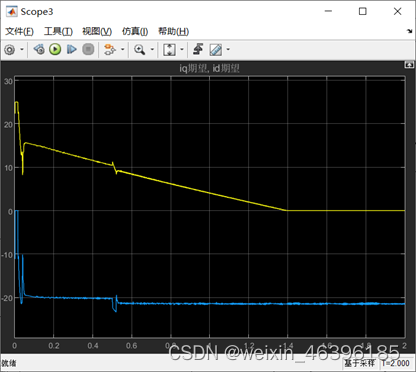
(2)电机期望的d轴和q轴电流曲线图,由图可以看出变化范围较好。仿真见下。
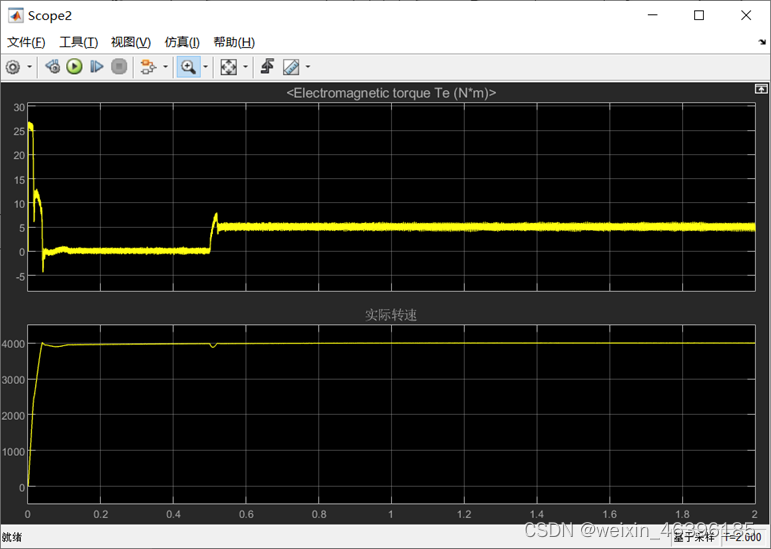
(3)由图可以看出,电机在0.04s左右电机达到了期望的转速4000r/min,在0.5s时电机突加负载后电机的转速也有良好的响应,能够达到4000r/min,超过2300r/min,弱磁扩速。仿真见下。
写作不易,如有需求帮助请私聊。















 2219
2219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









