






在上一节中,对MTPA控制策略进行了讲解,再回忆一下MTPA控制策略的思想, 是空间电流矢量的幅值Is,Is的峰值大小受限于三相逆变电路中的功率元件,如何Is峰值不变的情况下提高转矩输出,就需要通过MTPA控制策略计算出合理的Iq、Id值,使电流/电压利用率提高,电机输出最大转矩,本节将主要讲解MTPA+弱磁控制方法,MTPA计算式采用上一节末尾通过曲线拟合求出的计算式。
是空间电流矢量的幅值Is,Is的峰值大小受限于三相逆变电路中的功率元件,如何Is峰值不变的情况下提高转矩输出,就需要通过MTPA控制策略计算出合理的Iq、Id值,使电流/电压利用率提高,电机输出最大转矩,本节将主要讲解MTPA+弱磁控制方法,MTPA计算式采用上一节末尾通过曲线拟合求出的计算式。
这一节将对弱磁控制中的直接计算法进行讲解。在本节开始之前,首先声明使用的电机模型参数,在接下来的讲解中都使用该电机模型参数,保证讲解的连贯性和系统性。选择额定功率为3KW的内置式永磁同步电机(凸极),电机额定转速为1800rpm左右,直流母线电压Udc为311V,具体电机参数如下表所示:
| 参数 | 数值 | 单位 | 参数 | 数值 | 单位 |
| 额定功率P | 3 | KW | 定子电阻Rs | 0.958 | Ω |
| 额定转速w | 1200 | rpm | 转子磁链φf | 0.1827 | Wb |
| 母线电压Udc | 311 | V | 转动惯量J | 0.003 | Kg·m² |
| 极对数Pn | 4 | 阻尼系数B | 0.008 | N·m·s | |
| d轴电感Ld | 0.00525 | H | 采样时间Ts | 10 | μs |
| q轴电感Lq | 0.012 | H | PWM频率 | 10 | KHz |
1、弱磁控制思想
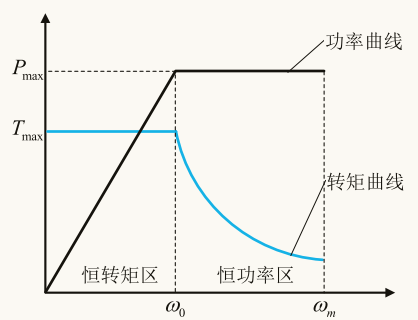
PMSM转动过程中,定子旋转磁场拖动转子磁场旋转的同时,又与定子绕组线圈固定,相当于绕组线圈切割转子磁场,进而在绕组线圈中产生感应电动势,称为反电动势,PMSM转速越快,反电动势越大。相电压需要克服反电动势,相电压与反电动势差值提供产生电流,该电流大小影响转矩大小,当转速离开恒转矩区后就进入衡功率区,反电动势越大,电机转矩越小,当相电压与反电动势相同时,电机转矩将变得很小,也可以理解为转速无法继续提高。
电机接受的最大电流和电压受到逆变器最大电流和电压的双重约束,当转速需要进一步提高,逆变器则不能提供更大的电流或电压。弱磁控制可以在不改变电机结构和逆变器容量的前提下提升永磁同步电机调速范围。
在恒功率区需要电机以更高转速运行时,需要通过弱磁控制简介调节定子电流矢量来削弱转子励磁磁场进而减小反电动势,维持电压平衡,使电机转矩增大或转速增加。
不同大小的转矩都对应不同的大小的恒转矩区和恒功率区,转矩越大,更转矩区范围越小。
弱磁控制通常在高速恒功率区使用,电机稳定高速运转,MTPA在低速恒转矩区使用。也可理解为当输出电压幅值大于最大限值后,就由MTPA控制变为弱磁控制。
dq坐标系中电压方程、转矩方程和功率方程分别为:
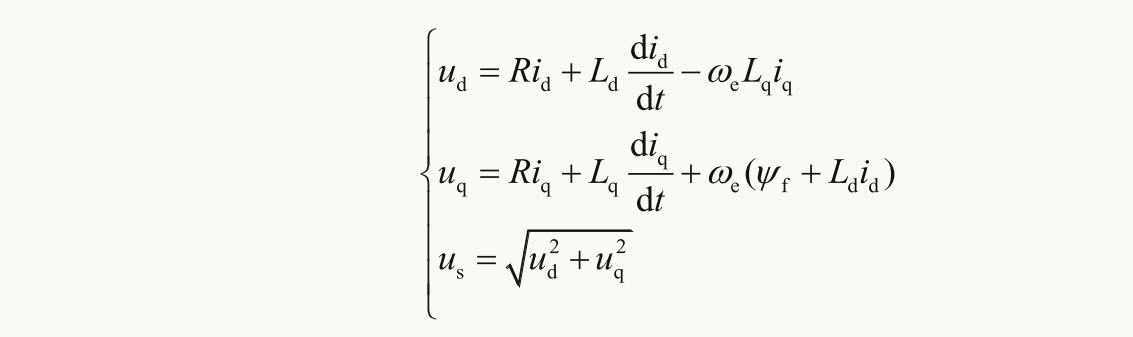


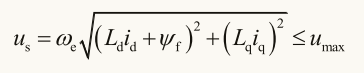
考虑电机稳定高速运行状态,由于强交叉耦合响应,电阻上的电压降可忽略,同时简化电压方程中的电流微分相,定子电压矢量的幅值变为:


由公式看出,可以通过反向增大直轴电流id或正向减小交轴电流iq来降低转子励磁磁场进而降低反电动势,定子电压矢量的幅值us也减小。
具体操作有两种:
(1)令 id反向增大,电机内部气隙中会生成一个相对转子磁场方向相反的磁场,可削弱永磁体磁链,id也可以称为去磁电流,电机转速随 id反向增加而增加。
(2)减小iq值以减小其在电机气隙中的磁场,这种方式的扩速能力受电机 Lq值的影响较大,电机的输出转矩能力会受到一定的影响。这种弱磁方式通过消减输出转矩的能力来换取转速范围的扩大,转速越高,恒转矩区越小。
2、定子电压电流约束条件
(1)电压约束
电压约束指逆变器能输出的最大电压约束。矢量控制系统中采用SVPWM脉宽调制技术,所能输出最大电压矢量幅值为umax。。
Umax = Udc/√3
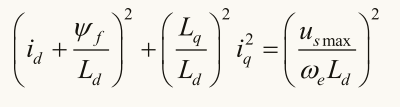
电压约束条件:
简化为
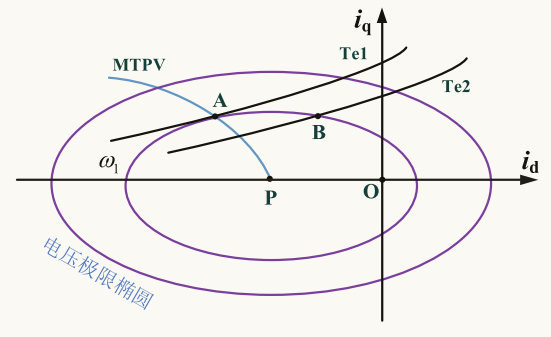
(2)电流约束
电流约束主要是取决于逆变器的输出电流以及电机定子绕组所能承受的最大电流,这两个值中较小的电流值作为极限电流值,电流极限值为imax。电流约束条件为:
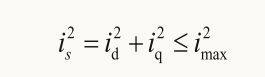
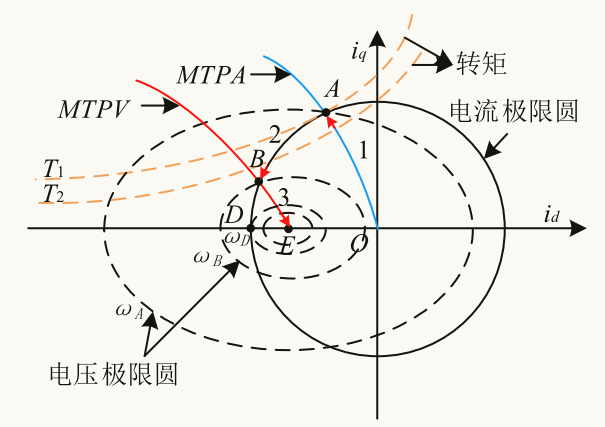
将电压和电流约束方程画出来,可以看出,当转速升高时,电压极限椭圆面积逐渐减小,最终减小至P点,P点对应的d轴电流称为特征电流ich。电流极限圆不受转速的影响。定子电流需要工作在电压和电流极限椭圆的公共区域。可以通过增大电枢绕组电感Ld,或者减小永磁体磁链来增大弱磁调速范围。电流存在极限圆,电压不存在极限圆,电压椭圆跟随转速变化。
3.最大转矩电压比MTPV控制
弱磁控制中也使用到了MTPV控制,在本节内容中虽然不使用MTPV控制,但也对MTPV控制进行介绍。
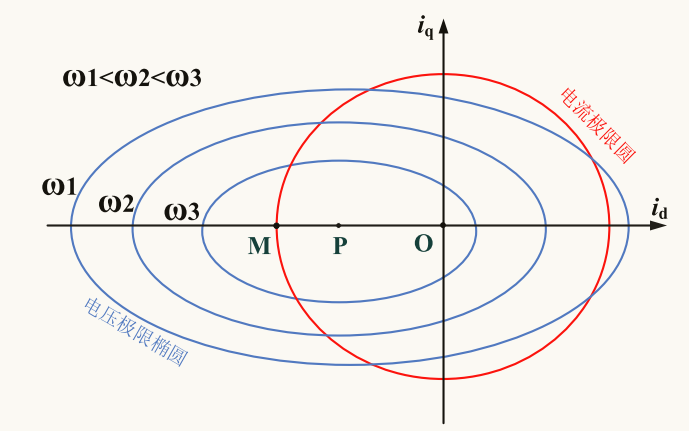
在转速w1对应的电压极限椭圆上,恒转矩曲线与电压极限椭圆相切于工作点A,A点对应的输出转矩Te1最大,相切点A对应的转矩比转速w1对应的电压极限椭圆上所有电流工作点对应的转矩都大。
因此在所有转速下,将恒转矩曲线与对应速度下的电压极限椭圆的相切点都连接起来,就形成MTPV曲线。控制定子电流沿着MTPV曲线运行,就成为MTPV控制。
求电压极限椭圆上最大转矩输出的电流工作点的坐标,电压极限椭圆方程为:

为了求转矩的最大值,使用拉格朗日极值法,列以下辅助函数,其中![]() 为拉格朗日因子:
为拉格朗日因子:
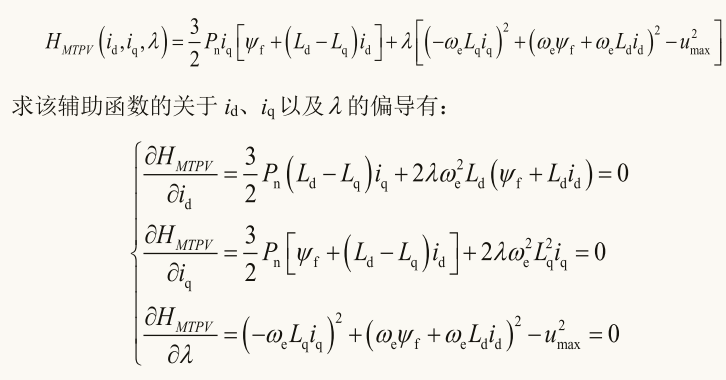
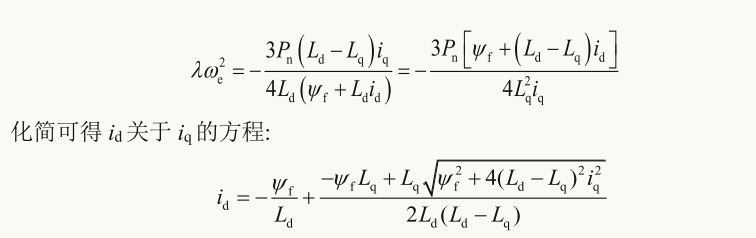
联立前两项:
也有下式输入量为电机电角速度的MTPV曲线关系式:
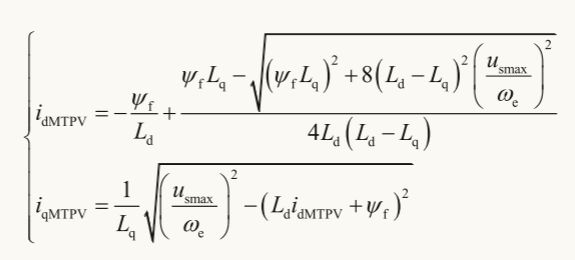
即可绘制出MTPV曲线,将该式代入关于![]() 的偏微分方程即可求出对应转速的MTPV的电流工作点。当P点在电流极限圆外时,MTPV曲线始终在电流极限圆和电压极限圆相交区域外,如果采用MTPV控制会导致PMSM失控。
的偏微分方程即可求出对应转速的MTPV的电流工作点。当P点在电流极限圆外时,MTPV曲线始终在电流极限圆和电压极限圆相交区域外,如果采用MTPV控制会导致PMSM失控。
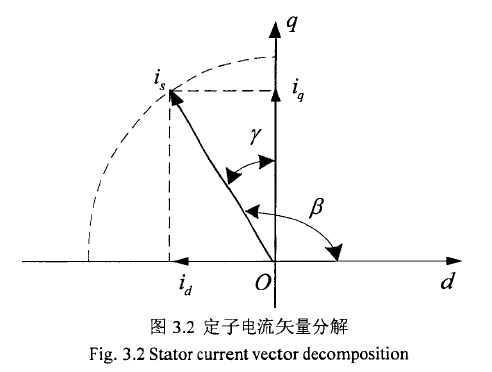
4.基于MTPA的超前角弱磁控制系统
电流圆半径与转矩有关,半径越大,转矩越大,电压圆与转速有关,电压圆约大,转速越小。在此重新解释一下MTPA曲线和MTPV曲线,在交直轴电流坐标系中,存在不同半径的电流圆,并存在电流极限圆,不同电流圆半径对应着不同转矩大小,不同半径电流圆与转矩弧线的交点的连线即为MTPA曲线。假设当前电磁转矩为T2(如下图所示),T2转矩曲线与MTPA曲线交点处的速度就称为转折速度(即当前转矩下能达到的最大转速)。若需要电机转速进一步升高,则需要电流矢量is向左下方移动,沿着恒转矩线移动(即iq电流值减下,id电流值负向增大),可以保证在转矩不变的情况下提高电机转速。若当电流矢量由恒转矩线移动到电流极限圆或MTPV曲线上时,虽然转速可以进一步提高,但是无法实现恒转矩控制,需要减小负载转矩,因此若需要保持负载转矩恒定的情况下提高转速,MTPV控制不合适加入到弱磁控制中。
根据论文中提到的方法,在转折速度以下采用MTPA控制,当电机转速要超过转折速度时采用超前角弱磁法进行扩速,超前角即电流矢量is与iq轴的夹角。超前角弱磁控制通过控制定子电流矢量超前角实现对电流轨迹的重新规划,使其满足电压极限圆的限制。
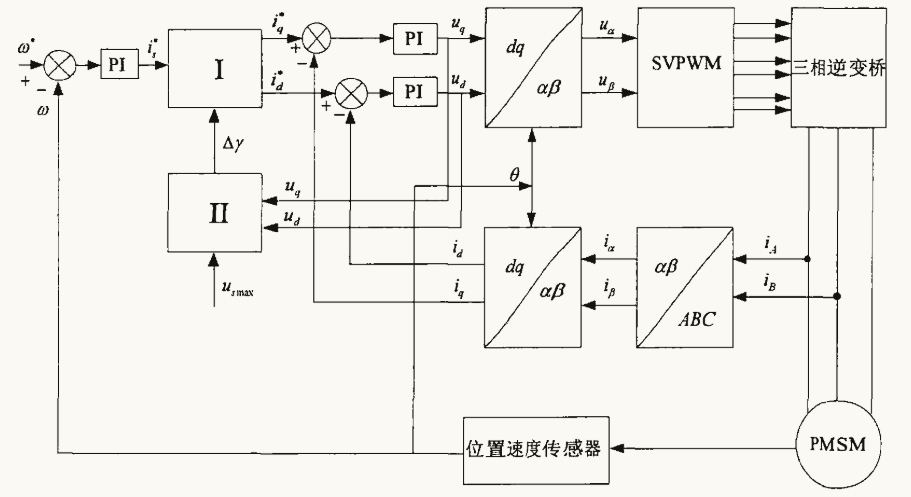
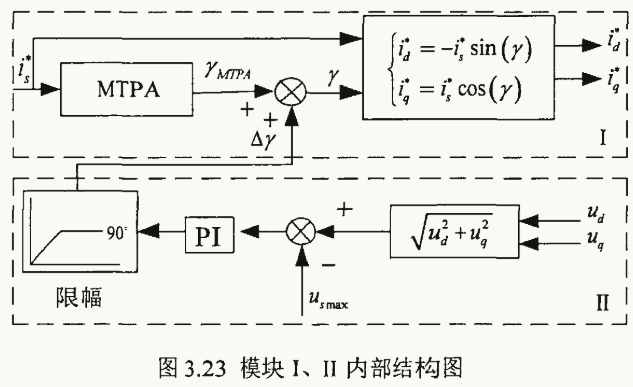
控制系统包括速度环、电流环、电压环三个闭环,包括MTPA控制模块I、超前角增量控制模块II。电压环根据电流环输出电压合成有效值 与系统电压极限值
与系统电压极限值![]() 的差值来控制超前角的增量∆γ 。
的差值来控制超前角的增量∆γ 。
当电机转速小于转折速度时,即当前速度的电压极限椭圆大于与转折速度电压极限椭圆,电压合成有效值 要小于
要小于![]() ,此时电压环PI输出为负值,通过限幅模块,将增量∆γ 输出为0,电机运行在MTPA状态,通过模块I首先求出超前角γ ,再求交直轴电流。
,此时电压环PI输出为负值,通过限幅模块,将增量∆γ 输出为0,电机运行在MTPA状态,通过模块I首先求出超前角γ ,再求交直轴电流。
当电机转速大于转折速度,电压合成有效值 要大于
要大于![]() ,此时电压环PI输出为正值,输出正的超前角增量∆γ ,∆γ 与模块I中求出的超前角
,此时电压环PI输出为正值,输出正的超前角增量∆γ ,∆γ 与模块I中求出的超前角![]() 相加得到弱磁状态下的超前角γ ,重新计算交直轴电流,实现电流指令的重新分配,将电流轨迹控制在电压极限椭圆内,避免电机控制失效。
相加得到弱磁状态下的超前角γ ,重新计算交直轴电流,实现电流指令的重新分配,将电流轨迹控制在电压极限椭圆内,避免电机控制失效。
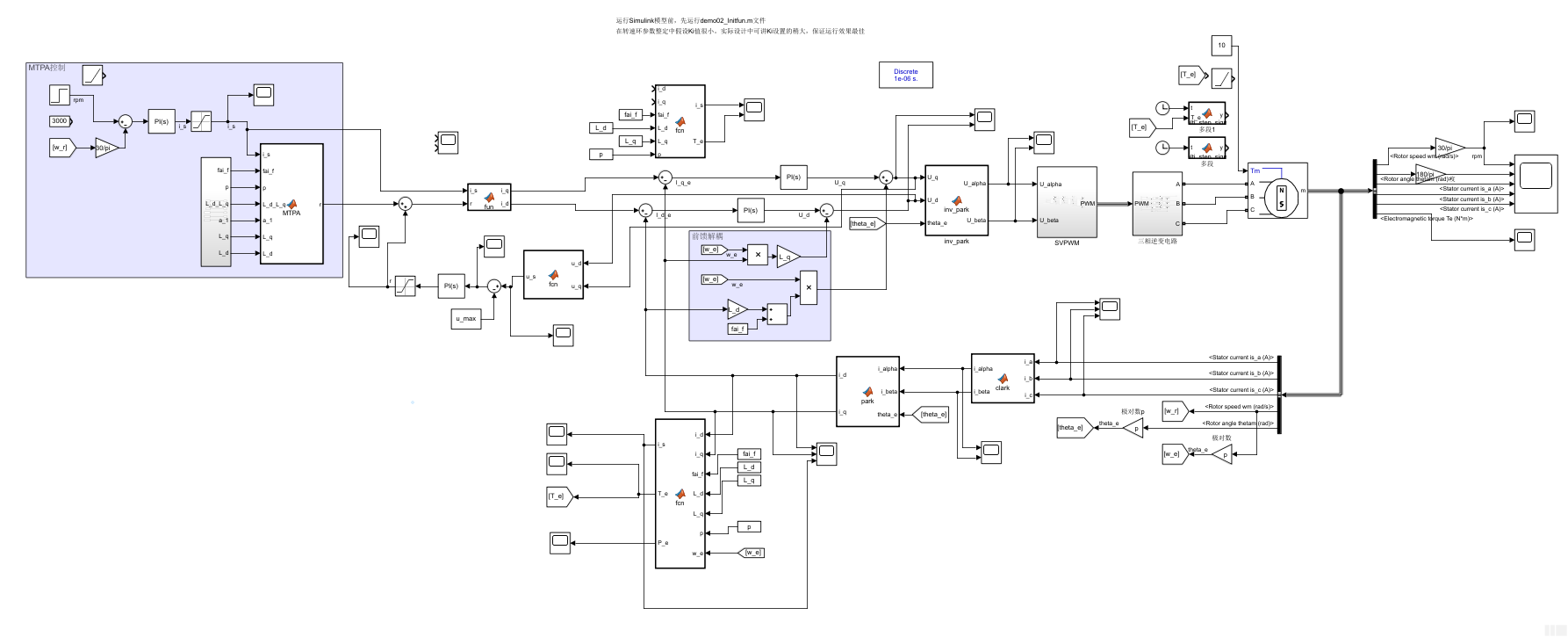
5.Simulink仿真
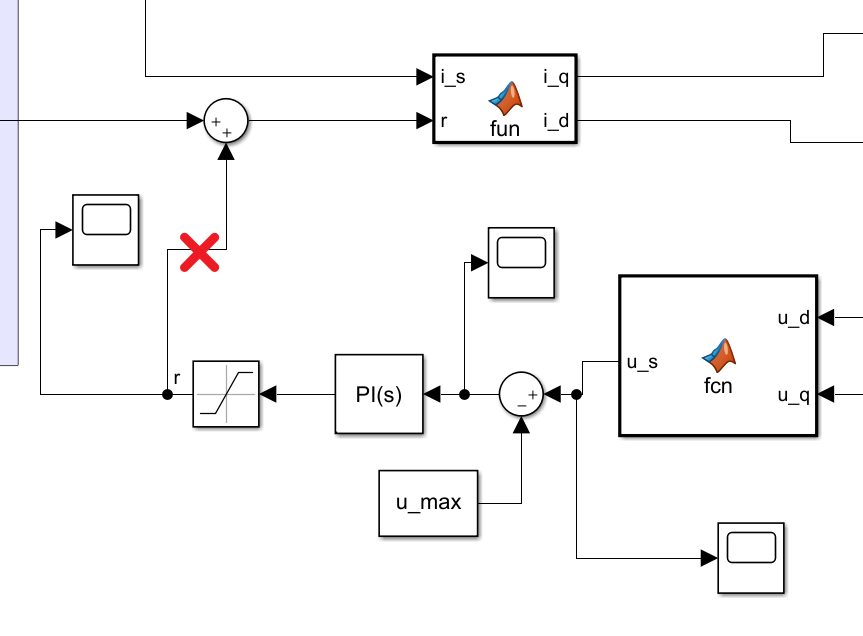
通过《七、永磁同步电机矢量控制(FOC)—MTPA控制及Simulink仿真》末尾的通过超前角求交直轴电流的公式,构建simulink模型(模型放在文章末尾)。

模块II中PI控制器参数给定为K_p = 0.0005,K_i = 0.01。
观察负载转矩为10Nm是的转速跟踪情况。
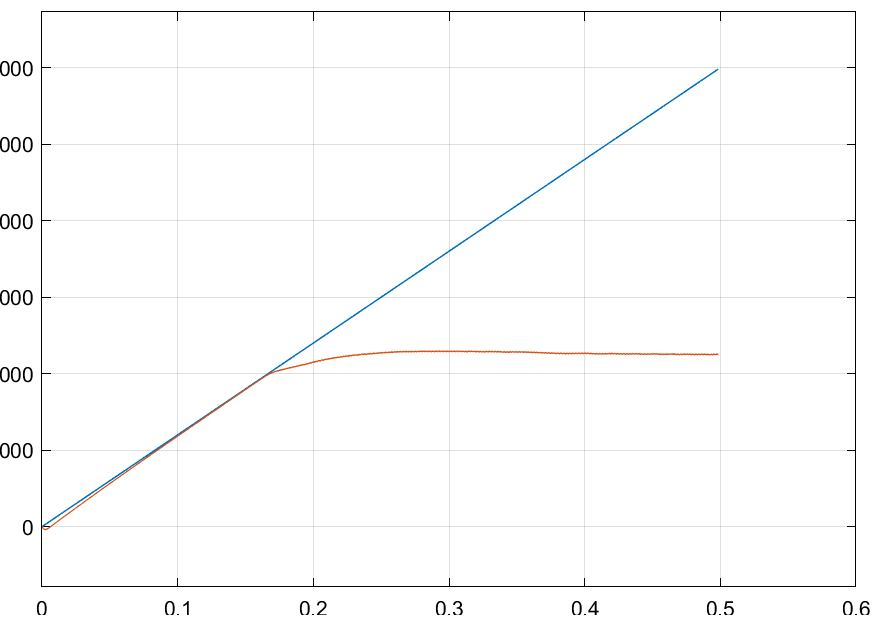
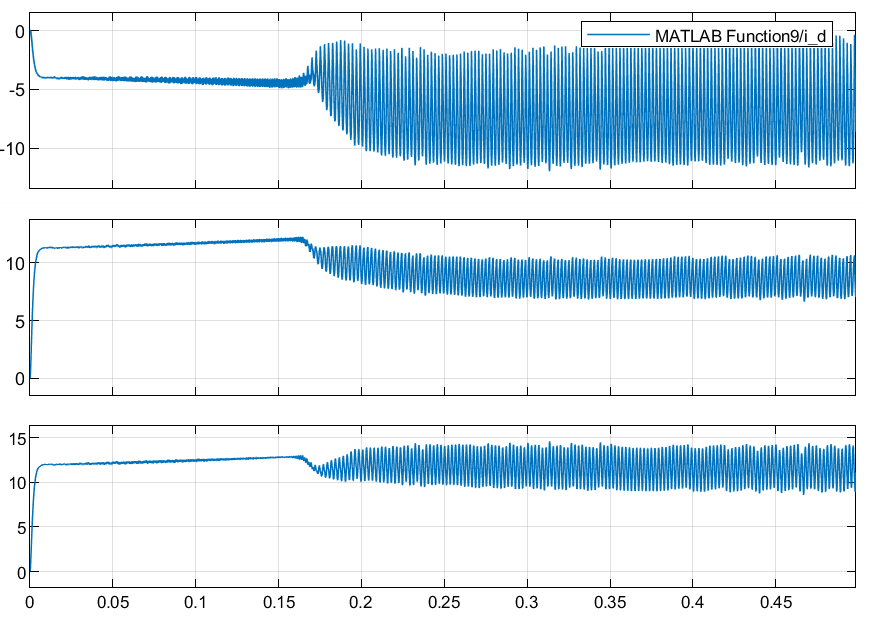
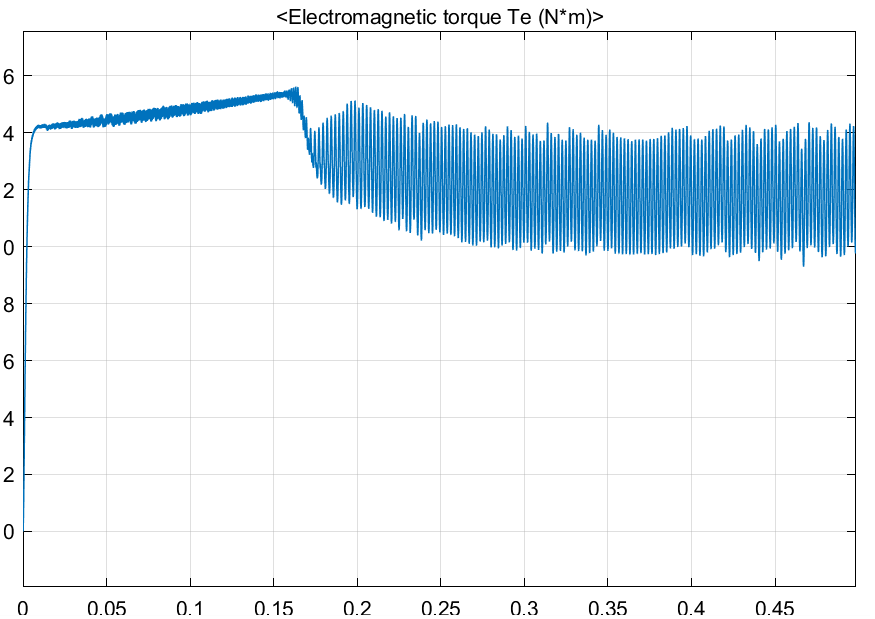
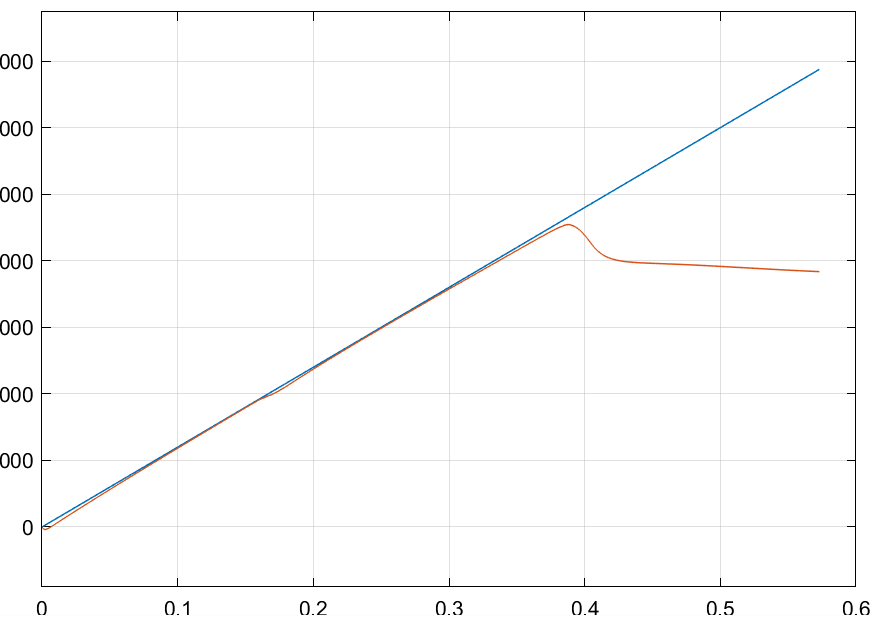
实验一,斜坡转速输入,转速斜率12000,仿真时长0.6s,只采用MTPA控制,观察转速、交直轴电流、转矩图像。模块II到模块I之间的连线断开,即为MTPA控制。
观察转速图像可知,转速只能达到2250rpm左右,即为最大转速。到达极速后,d轴电流、转矩都有较大的波动。
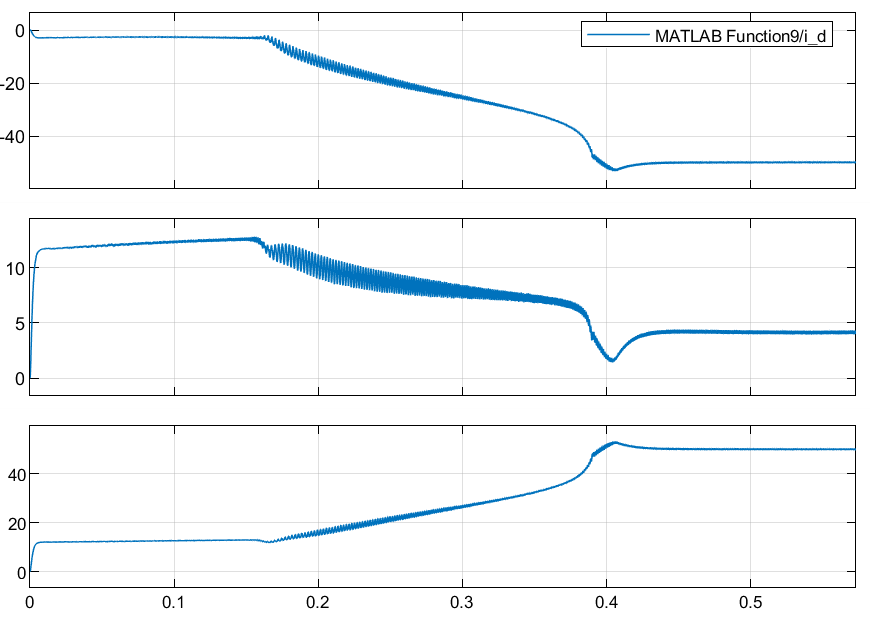
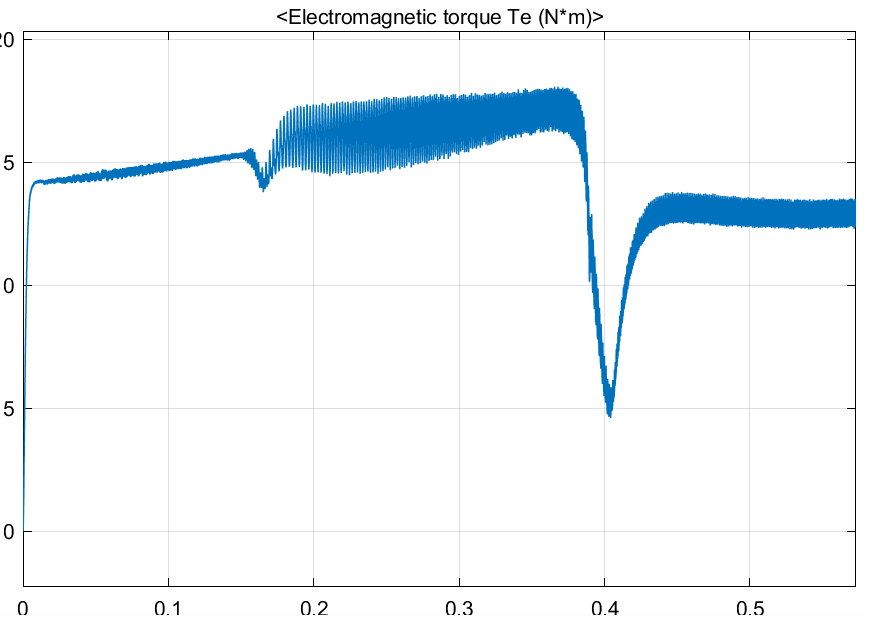
实验二,斜坡转速输入,转速斜率12000,仿真时长0.6s,采用弱磁控制。
转速增加到3500rpm以上,说明弱磁控制有效。随着转速超过转折速度,q轴电流逐渐减小,d轴电流负方向增大,电流矢量逐渐增加至极限值。
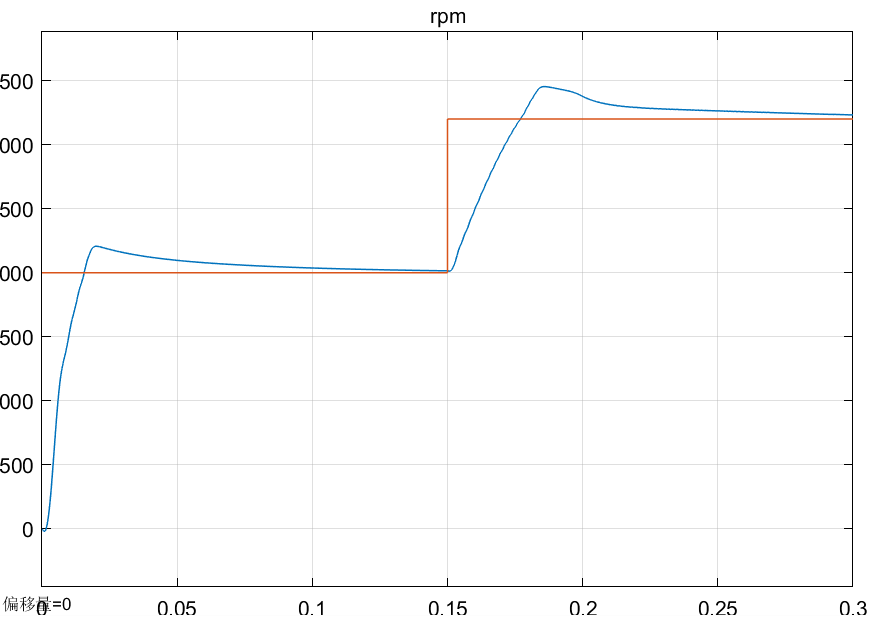
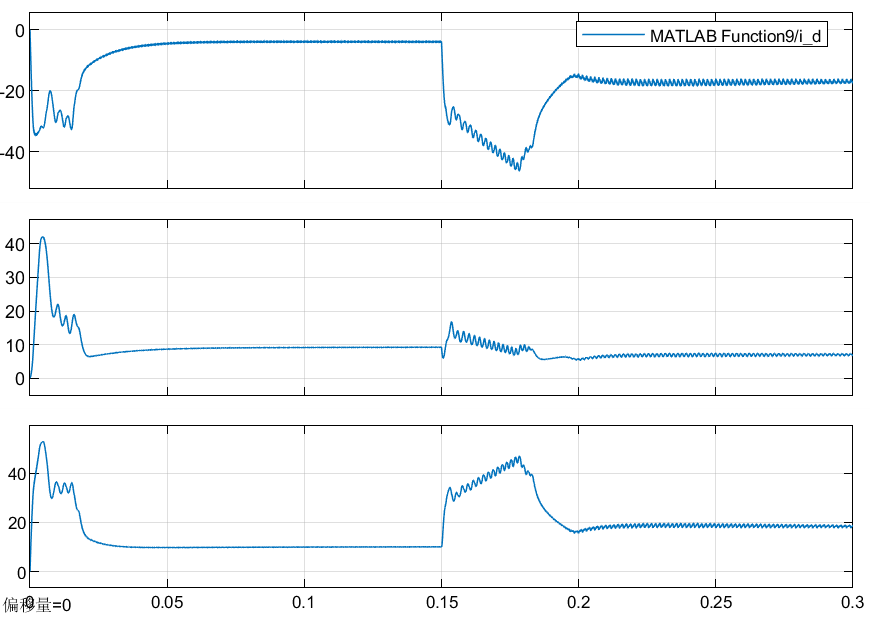
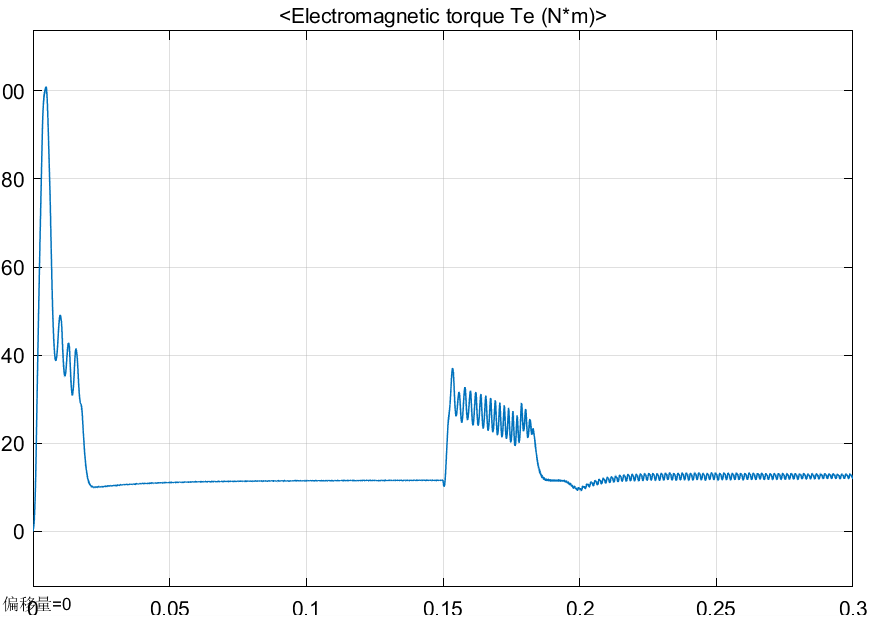
实验三,转速阶跃输入,前0.15s转速为2000rpm,后0.15s转速为3200rpm,仿真时长0.3s,采用弱磁控制。
转速可以较好的跟踪。
模型文件
链接: https://pan.baidu.com/s/1Lb5ZFWI0779pwWHN9TYKaw?pwd=gaud
提取码: gaud
参考资料
1.《车用永磁同步电机弱磁控制研究》彭帅(学位论文)
2.《永磁同步电机磁链辨识及弱磁控制研究》谢明睿(学位论文)
3.《永磁同步电机最大转矩电流比和超前角弱磁控制系统研究》陈旭辉(学位论文)

















 5601
5601

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









