







采用cplex求解VRPTW问题
VRPTW(Vehicle Routing Problem with Time Windows)是一类涉及到多个配送点、多辆车辆的路径规划问题,每个客户有一定的数量需求和时间窗口,需要在规定时间内配送到指定地点。Cplex是一种高效、强大的数学优化求解器,能够解决复杂的VRPTW问题。
Cplex求解VRPTW问题的方法通常包括以下步骤:
1.建模:将VRPTW问题转化为数学模型,包括客户需求、时间窗口、车辆容量、路程、时间等约束条件。
2.求解:利用Cplex求解器,将VRPTW问题的数学模型输入,利用线性规划或者混合整数规划求解。
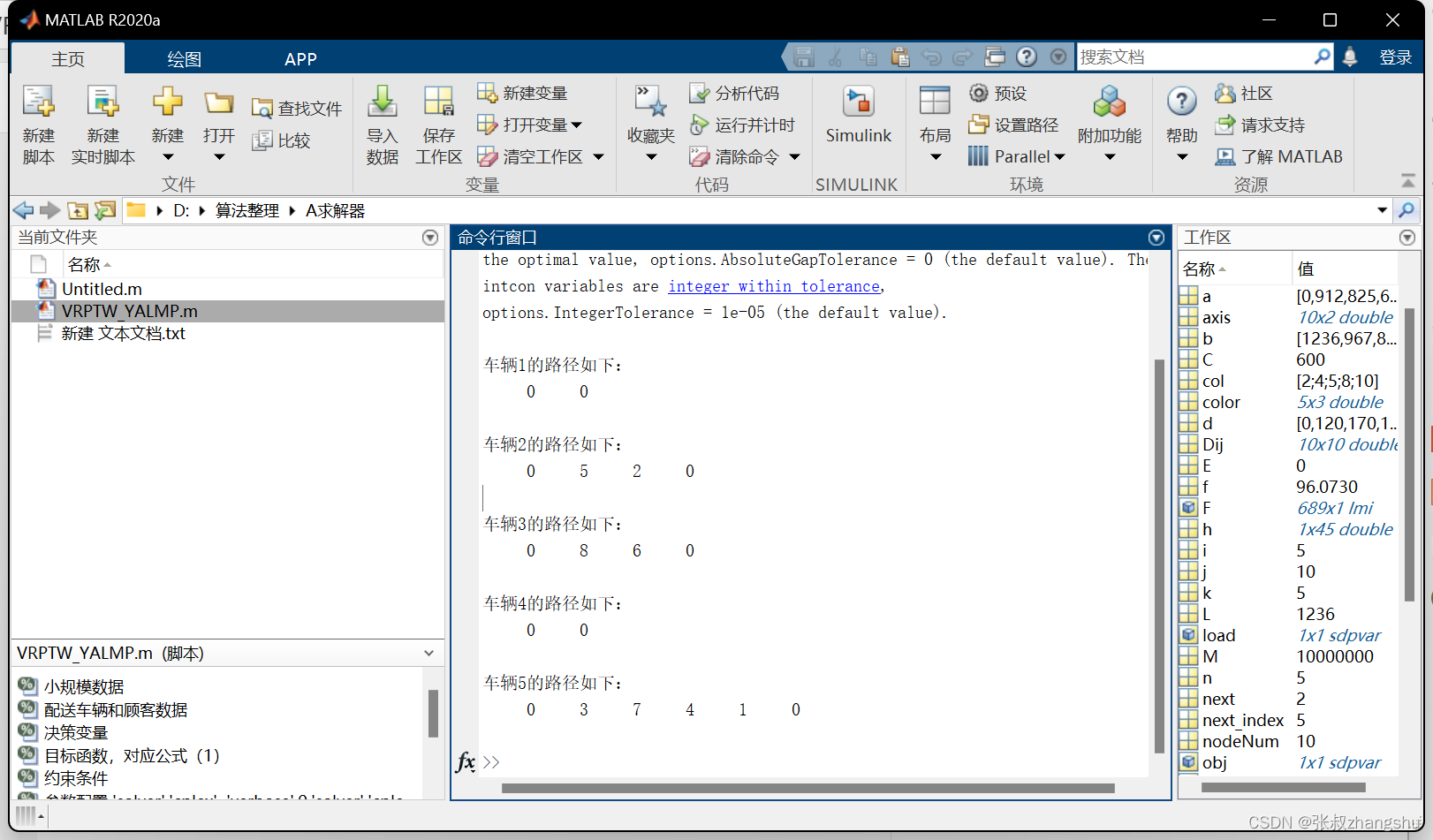
3.解析:Cplex求解器输出求解结果,包括每辆车的路径、客户的配送时间、总路程、总时间等信息。
4.优化:根据输出结果,优化车辆路径规划和配送时间,重新建模求解,不断迭代,直至求解满足约束条件的最优解。
模型
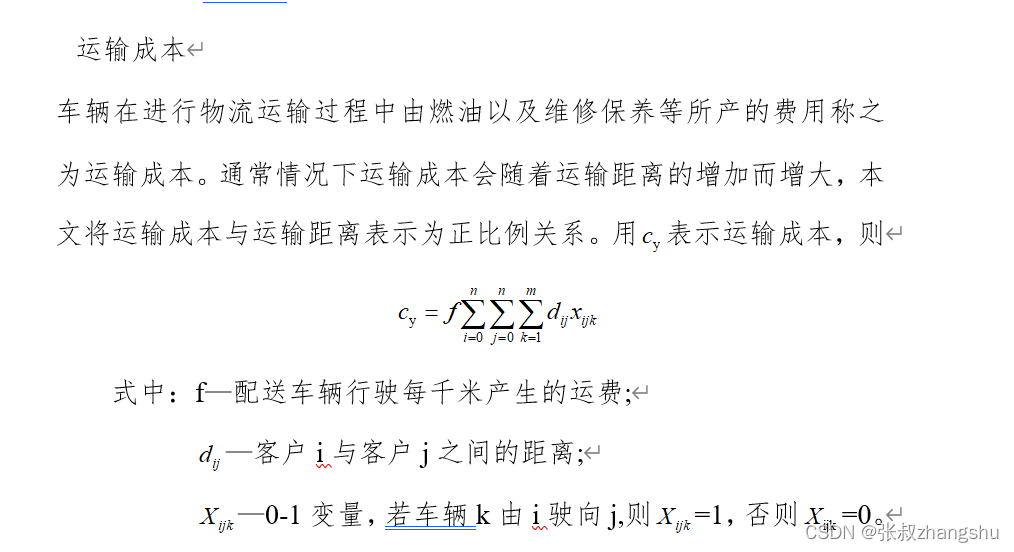
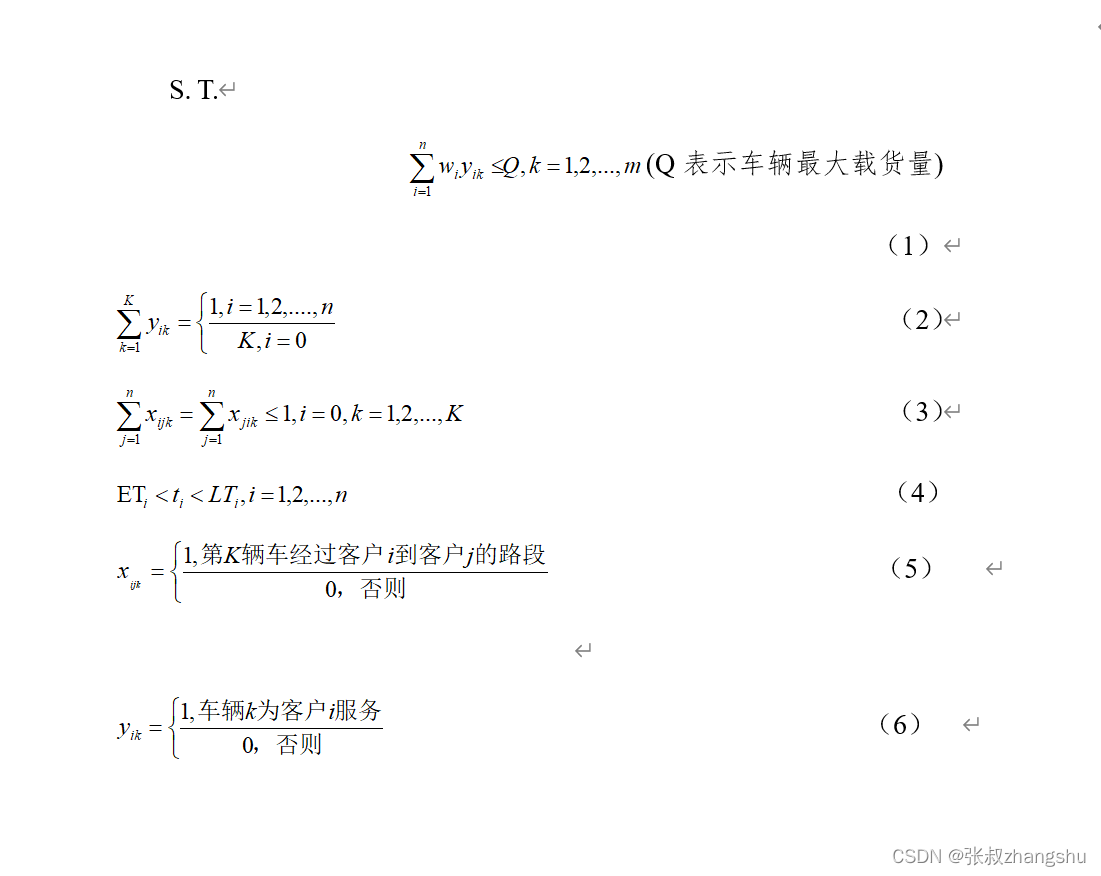
直接上代码
clear
clc
%% 小规模数据
d=[0,120,170,150,140,170,140,120,190]; %需求量
a=[0,912,825,65,727,15,621,170,255]; %左时间窗
b=[1236,967,870,146,782,67,702,225,324]; %右时间窗
E=a(1); %配送中心左时间窗
L=b(1); %配送中心右时间窗
s=[0,90,90,90,90,90,90,90,90]; %服务时间
x=[81.5,87,75,85,89,77,76,87,73]; %横坐标
y=[41.5,37,53,52,41,58,45,53,38]; %纵坐标
d=[d,d(1)]; %体现出数学模型中的第n+1个节点,也就是配送中心
a=[a,a(1)]; %体现出数学模型中的第n+1个节点,也就是配送中心
b=[b,b(1)]; %体现出数学模型中的第n+1个节点,也就是配送中心
s=[s,s(1)]; %体现出数学模型中的第n+1个节点,也就是配送中心
x=[x,x(1)]; %体现出数学模型中的第n+1个节点,也就是配送中心
y=[y,y(1)]; %体现出数学模型中的第n+1个节点,也就是配送中心
axis=[x' y']; %顾客坐标
h=pdist(axis);
Dij=squareform(h); %距离矩阵
%% 配送车辆和顾客数据
vNum=5; %车数量
nodeNum=numel(a); %总节点数量
C=600; %单车容量
%% 决策变量
Xijk=binvar(nodeNum,nodeNum,vNum,'full'); %i、j节点之间是否由第k辆车进行配送
Wik=sdpvar(nodeNum,vNum,'full'); %表示车辆k对i点的开始服务时间
M=1e7; %足够大的数,对应公式(6)中的Mij
tol=1e-7; %决策变量精确度
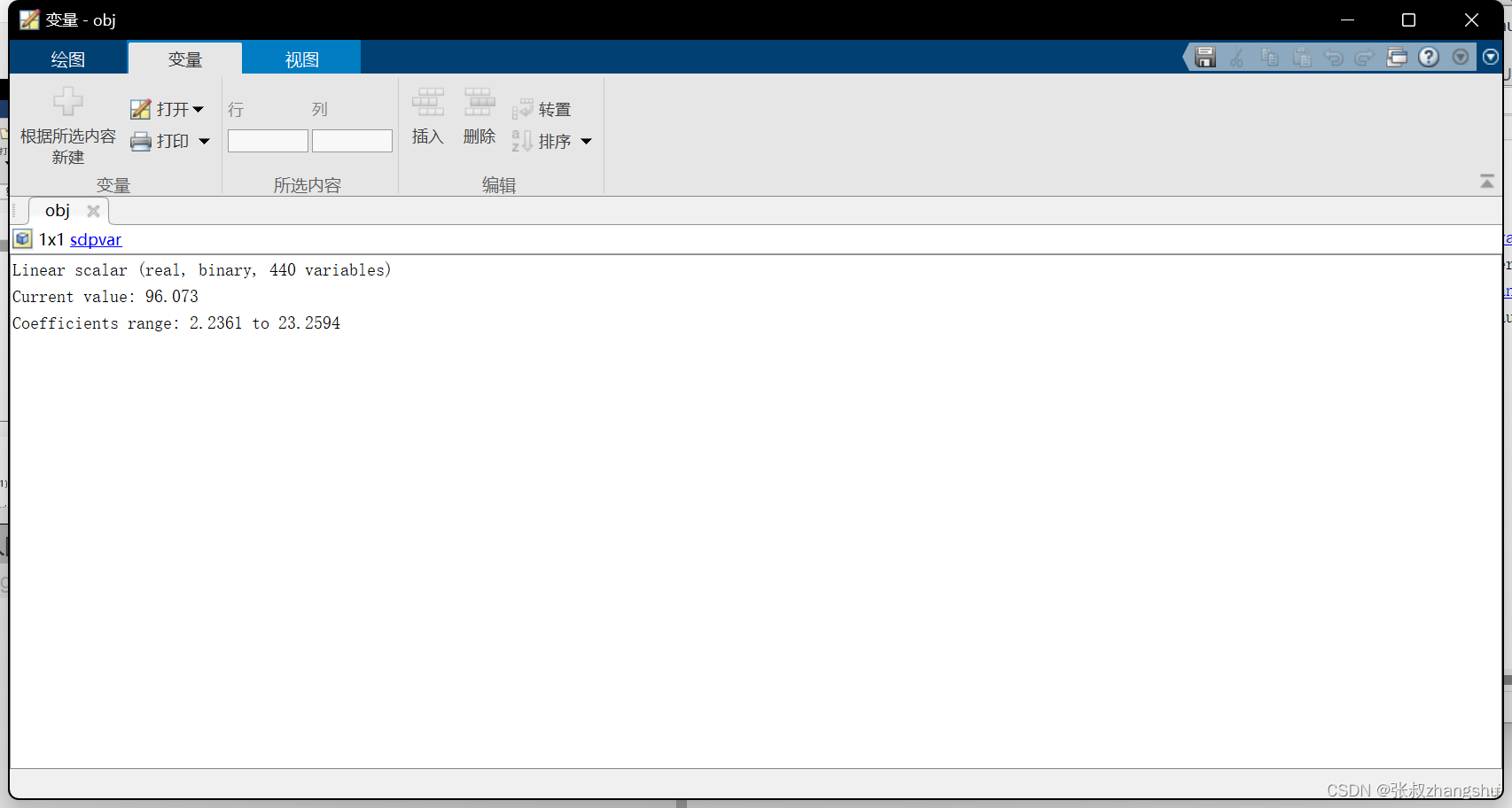
%% 目标函数,对应公式(1)
obj=0;
for i=1:nodeNum
for j=1:nodeNum
for k=1:vNum
obj=obj+Dij(i,j)*Xijk(i,j,k);
end
end
end
f=obj;
%% 约束条件
F=[];
%每个需求点i都会被一辆车经过,对应公式(2)
for i=2:nodeNum-1
F=[F;sum(Xijk(i,1,:))==0;sum(Xijk(i,i,:))==0;sum(sum(Xijk(i,:,:)))==1];
end
%每条配送路线从配送中心出发只能前往一个顾客点,对应公式(3)
for k=1:vNum
F=[F;Xijk(1,1,k)==0;sum(Xijk(1,:,k))==1];
end
%流量平衡,对应公式(4)
for j=2:nodeNum-1
for k=1:vNum
F=[F;sum(Xijk(j,:,k))==sum(Xijk(:,j,k))];
end
end
%每条配送路线都必须返回配送中心,对应公式(5)
for k=1:vNum
F=[F;Xijk(nodeNum,nodeNum,k)==0;sum(Xijk(:,nodeNum,k))==1];
end
%时间连续不等式,对应公式(6)
for k=1:vNum
for i=1:nodeNum
for j=1:nodeNum
F=[F;Wik(i,k)+s(i)+Dij(i,j)-Wik(j,k)<=(1-Xijk(i,j,k))*M];
end
end
end
%顾客时间窗约束,对应公式(7)
for k=1:vNum
for i=2:nodeNum-1
F=[F;a(i)*sum(Xijk(i,:,k))<=Wik(i,k)];
F=[F;Wik(i,k)<=b(i)*sum(Xijk(i,:,k))];
end
end
%配送中心时间窗约束,对应公式(8)
for k=1:vNum
for i=[1,nodeNum]
F=[F;E<=Wik(i,k)];
F=[F;Wik(i,k)<=L];
end
end
%装载量约束,对应公式(9)
for k=1:vNum
load=0;
for i=2:nodeNum-1
load=load+d(i)*sum(Xijk(i,:,k));
end
F=[F;load<=C]; %每个回路上的需求量之和小于车的容量
end
%% 参数配置 'solver','cplex' 'verbose',0,'solver','cplex'
ops=sdpsettings();
%% 求解问题
sol=solvesdp(F,f,ops);
f=double(f);
Xijk=double(Xijk);
Wik=double(Wik);
%% 画出配送路线图
plot(axis(2:nodeNum-1,1),axis(2:nodeNum-1,2),'ro');hold on;
plot(axis(1,1),axis(1,2),'pm');hold on;
%在各个节点上标出对应的节点编号
for i=1:nodeNum
if i~=nodeNum
text(axis(i,1)-0.1,axis(i,2)+0.5,num2str(i-1));
else
text(axis(i,1)-0.1,axis(i,2)-0.5,num2str(i-1));
end
end
%根据Xijk的值,将对应节点连接
color=hsv(vNum);
for i=1:nodeNum
for j=1:nodeNum
for k=1:vNum
if abs(Xijk(i,j,k)-1)<1e-5
plot([axis(i,1),axis(j,1)],[axis(i,2),axis(j,2)],'-','color',color(k,:),'linewidth',1);
end
end
end
end
%% 将最终的决策变量Xijk转换为具体的配送方案
VC=cell(vNum,1); %配送方案
for k=1:vNum
[row,col]=find(abs(Xijk(:,:,k)-1)<tol);
n=numel(row);
route=zeros(1,n+1);
route(1)=0; %起点为配送中心
route(end)=0; %终点为配送中心
for i=1:n
if i==1
next_index=find(row==1);
else
next=col(next_index);
next_index=find(row==next);
route(i)=next-1;
end
end
VC{k,1}=route;
disp(['车辆',num2str(k),'的路径如下:']);
disp(route)
end


















 1572
1572

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











