







 这篇博客介绍了如何使用ABB机器人进行数组码垛编程,强调了数组在码垛工艺中的重要性和优势。通过创建和理解数组,可以实现程序的稳定、简洁和易于维护。示例程序展示了如何定义和应用数组进行码垛操作,包括拾取和放置动作,以及如何利用数组数据进行位置坐标计算。
这篇博客介绍了如何使用ABB机器人进行数组码垛编程,强调了数组在码垛工艺中的重要性和优势。通过创建和理解数组,可以实现程序的稳定、简洁和易于维护。示例程序展示了如何定义和应用数组进行码垛操作,包括拾取和放置动作,以及如何利用数组数据进行位置坐标计算。
大家好!今天工博士给大家整理一篇关于ABB机器人数组码垛的内容,希望对大家有所帮助!
数组讲解
做码垛,怎么能少了数组!
数组做码垛,懂的人一看就懂,程序稳定且简单明了,后期维护方便快捷!
数组这个词很多人比较陌生,但是在做码垛这个工艺时,学会数组,你的编程肯定看起来
高、大、尚!
一般我们做轨迹,要么就是单点程序顺着做,高级一点的就是采用偏移,但偏移的数值还一个一个轨迹慢慢做的,要是有一个通式,只需要一个例行程序就能解决岂不快哉!
接下来我们看看大神们怎么做程序!!!

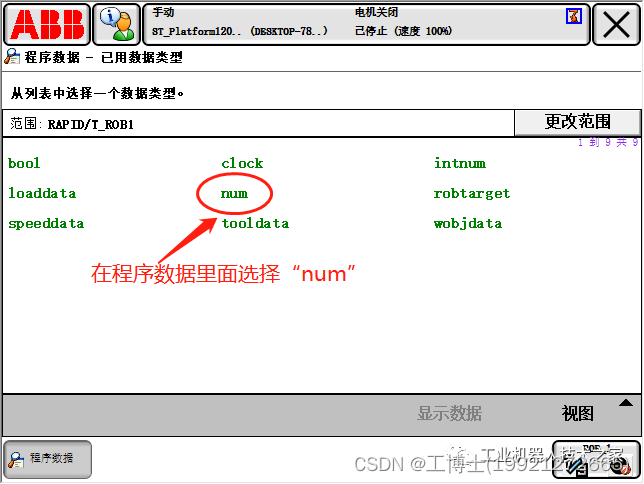
数组的创建:
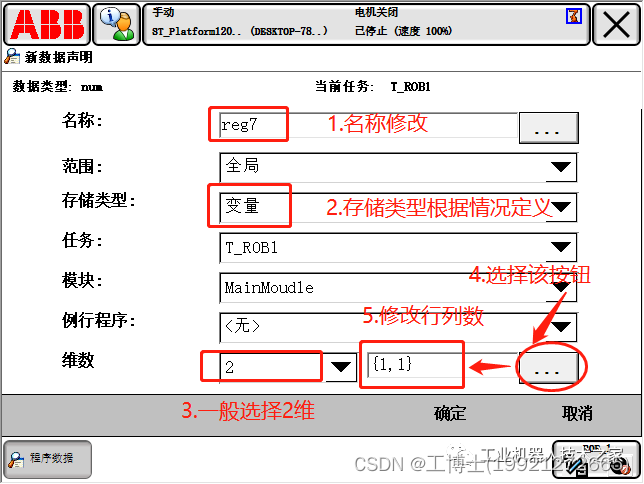
- 选择左上角“ABB”——“程序数据”——“num”量(我们在此需要记录坐标偏移数据是数字量,所以选择num量)——“新建”——修改“名称”以及选择“维数”(维数根据我们最终需要来修改)。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









