






一、创建功能包
$ cd ~/catkin_ws/src
$ catkin_create_plg learning_tf roscpp rospy tf turtlesim创建完后如下图所示:
二、创建tf广播器代码(C++)
实现一个tf广播器
- 定义TF广播器;
- 创建坐标变换值 ;
- 发布坐标变换
代码如下所示:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// 创建tf的广播器
static tf::TransformBroadcaster br;
// 初始化tf数据
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 广播world与海龟坐标系之间的tf数据
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_broadcaster");
// 输入参数作为海龟的名字
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
}
turtle_name = argv[1];
// 订阅海龟的位姿话题
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
};
三、创建tf监听器代码(C++)
实现一个TF监听器
- 定义TF监听器(TransformListenter);
- 查找坐标变换(waitForTransform、lookupTransform)
代码如下:
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_listener");
// 创建节点句柄
ros::NodeHandle node;
// 请求产生turtle2
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// 创建发布turtle2速度控制指令的发布者
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);
// 创建tf的监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok())
{
// 获取turtle1与turtle2坐标系之间的tf数据
tf::StampedTransform transform;
try
{
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据turtle1与turtle2坐标系之间的位置关系,发布turtle2的速度控制指令
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};四、配置tf广播器与监听器代码编译规则
配置CMakeLists.txt中的编译规则
- 设置需要编译的代码和生成的可执行文件;
- 设置连接库
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})五、编译并运行
catkin_make
rosrun turtlesim turtlesim_node
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tflistener
rosrun turtlesim turtle_teleop_key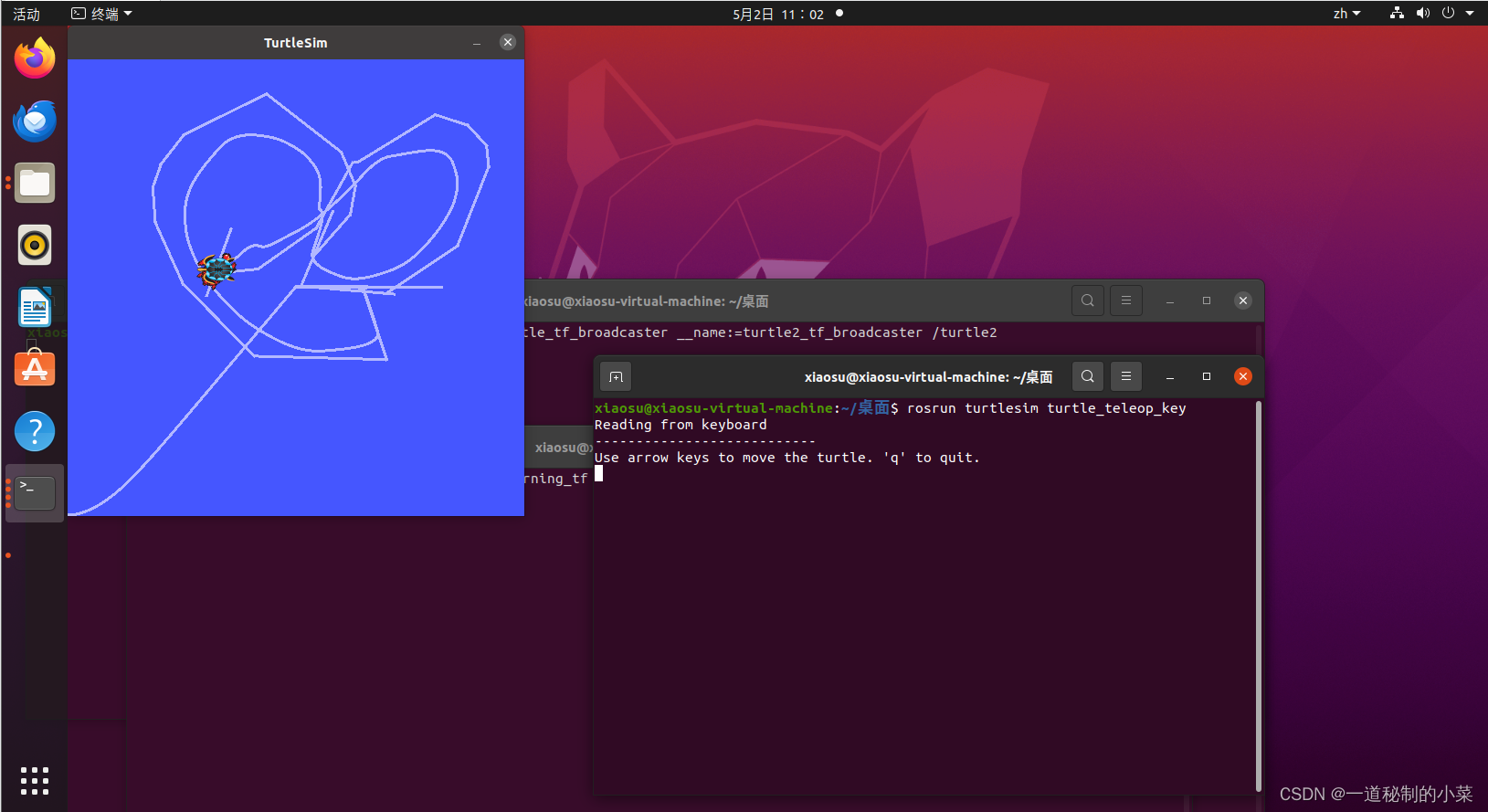
运行后,后面的海龟一直跟着前面的海龟。
















 267
267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











