







导读:电机驱动是很常见的应用,在很多系统中都会碰到需要改变电机的速度以实现相应的控制功能,这就涉及到电机速度曲线规划的问题。
本文仅代表记录自己的学习理解,如有错误,欢迎指正。想要S型速度曲线规划的仿真模块的学友请关注公众号:浅谈电机控制。留下邮箱获取。
1速度曲线介绍
电机在启停的时候,速度会存在阶跃的情况,这会对电机造成两个问题。(1)电机速度突变对电机本体的影响;(2)启停时刻会因为惯性而产生很大的力而导致电流过载。所以通常用加减速控制算法来规划电机速度。
2 S型曲线速度规划
因为梯形曲线存在加速度不连续的问题,在这篇文章中就重点讨论一下电机S型曲线规划的问题。S型曲线速度规划相对于梯形速度规划,其速度曲线会更加平滑,电机运行会更加平稳。

如图1可知,梯形加减速控制策略虽然容易实现,但其加速度不连续,在加速度阶段与匀速阶段的衔接处存在突变的情况,这会给电机本体造成从冲击。
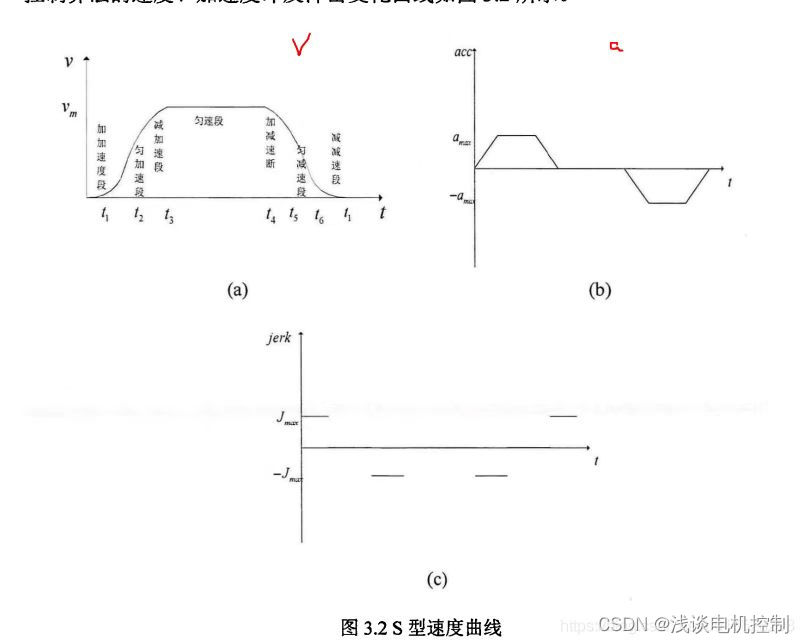
图2 S型速度曲线
S型速度曲线将整个运动过程划分为7个阶段,即加加速度段、匀加速度段、减加速度段匀速段、加减速度段、匀减速度段和减减速度段,不同阶段速度衔接连续,且加速度的变化率可控,解决了梯形加减速控制策略存在的加速度突变的问题。

图3比较常见的S型曲线
图3只是S型曲线的一个特例。公式1是更为普遍的描述形式:

那如何把S型函数运用到异步电机调速中呢?所谓电机调速实际上就是电机速度与运行时间之间存在一定的函数关系。很显然,纵轴就是电机速度,横轴就是运行时间。于是就可以得到电机S型速度曲线的函数关系如下:

可能会发现,公式2的速度曲线与前面的数学函数有所区别。这是为了更好的适应调速的区别。在数学上,数轴是对称的,但在调速调节过程中,速度和时间都不可能存在负数的情况,所以需要对其进行平移。但平移过后,S曲线将不再对称,所以我们以整个调速过程的调速时间的中间点为轴就是对称的了,所以就有了公式2的表达式了。
3 设计与实现

图4 S曲线实现
还没有研究透,就先不介绍了。具体代码实现可以在CSDN上找到。
3 S型曲线运用
把S型速度规划运用到异步电机矢量控制中,可以发现动态部分的性能得到改善。

图5整体仿真
(1)速度规划前


图6 电机速度和负载设置

图7速度规划前的三相电流

图8 局部放大图
(1)速度规划后

图9速度规划后的三相电流

图10 局部放大图

(a)梯形速度规划
 (b)S型速度规划
(b)S型速度规划
图11 速度规划
从以上对比发现:电机运用S型速度规划后,启动电流变小且动态部分的性能得到改善。
4 总结
S型速度规划的作用:(1)避免梯形速度曲线在加速度阶段与匀速阶段的衔接处存在突变的情况,改善了动态响应;(2)异步电机全速范围内速度曲线规划前后的仿真对比,S型规划后的电机的启动电流小。
补充
异步电机的启动电流抑制:异步电机在启动时,因为磁通还没有完全建立,若使用的控制算法并未对电流控制的情况下直接启动电机将可能造成启动电流过大而引起保护动作。在实际中,电机启动前可以先让电机的内部建立起磁通后再启动。预励磁的方法为直流预励磁,即在零矢量和某一固定电压矢量之间进行切换,当电流超过设定值时就切换到零矢量,使用该方法可以在增大启动转矩的同时有效地减小启动电流。
预励磁会在后面模型预测控制中会单独介绍一下。感兴趣的学友可关注公众号:浅谈电机控制,一起交流学习。















 1205
1205











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









