






前言
多传感器融合的项目免不了外参标定过程,最近参与的项目时间也挺久了,尝试了不少标定算法,包括手动选点PNP求解、有对象的自动标定、无对象的自动标定和手动标定算法,最后还是回归到手动标定上。本文总结一下这个项目中用过的标定算法和效果,权当记录。
一、标定算法的分类
明确“标定”的定义:本文的“标定”特指“外参标定”,具体的是指激光雷达坐标系到相机坐标系的变换矩阵(有机器人相关经验的应该不难理解)。
目前我们在GitHub中使用过的开源标定算法主要分三类:有目标自动标定、无目标自动标定、手动标定,目标一般指标定板,有目标即需要采集的数据中包含标定板,无目标即不需要标定板,手动标定就是openCalib提供的手动对齐工具。
有目标自动标定基本上一搜一大把,因为项目用的是livox,所以有目标的自动标定使用的是Livox-SDK下的:
https://github.com/Livox-SDK/livox_camera_lidar_calibration.git
官方的比较麻烦,需要更换来更换去,有大神改了下代码,帮助我们方便使用:
https://github.com/Shelfcol/livox_camera_lidar_calibration_modified.git
当然也可以使用matlab提供的标定工具箱,只是与上面这两个相比,matlab还是麻烦些。
无目标的自动标定那一定是港大的 livox_camera_calib,标定内容就是一组图片对应一组pcd文件,需要环境中有较多连续深度点,最好是不要有树木。
以上的自动标定都比较随缘,但是大都可以提供一个不错的外参初始值,在此初始值之上进行手动微调,就是引入openCalib手动标定工具箱的作用了(!不是让你上来就手动标定,有初始外参再微调才是最方便的)
二、openCalib使用步骤
0.运行环境
Cmake
opencv 2.4
eigen 3
PCL 1.9
Pangolin
如果安装有ros,则cmake和eigen3就有了
opencv实测3.4.16可用,大部分开源算法和opencv3.4.16兼容性也比较好,建议安装
注意,ros自带opencv,安装新的opencv时建议共存,csdn里有不少文章介绍怎么共存
pangolin 安装0.8最新版本即可
pcl1.9 必须,ubuntu18的ros自带pcl1.8是不能编译的,所以也需要再共存一个pcl1.9版本,网上资源也足够了
1.下载源码并编译
我们只使用手动标定的,所以只编译manual_calib即可
mkdir calibration_ws
cd calibration_ws/
git clone https://github.com/PJLab-ADG/SensorsCalibration.git
cd SensorsCalibration/lidar2camera/manual_calib/
mkdir build
cd build/
cmake ..
make

2.设置参数
开始标定前需要设置相机内参和初始的外参
找到manual_calib/data/center_camera-intrinsic.json并编辑
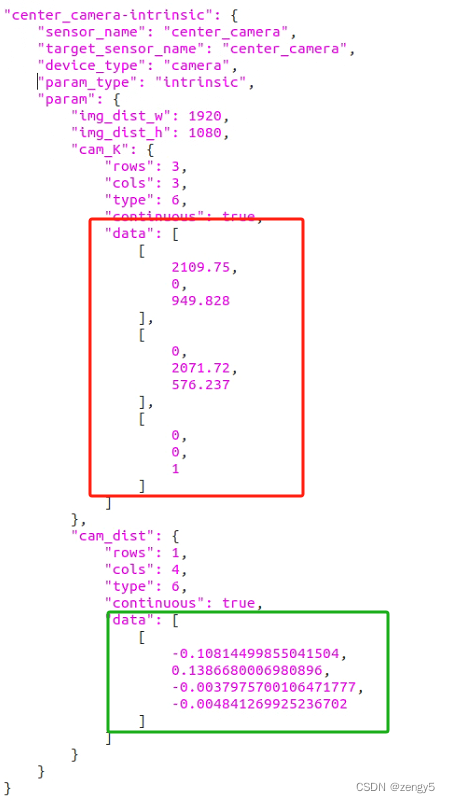
红色框内是相机的内参矩阵,绿色框内是相机畸变参数。
项目用的是realsense相机,畸变参数全为0,所以绿框对我们而言没什么用,使用鱼眼相机的时候要注意这块,一般顺序就是k1,k2,p1,p2,如果要求五个那就是k1,k2,k3,p1,p2。
再设置初始外参
找到manual_calib/data/top_center_lidar-to-center_camera-extrinsic.json并编辑
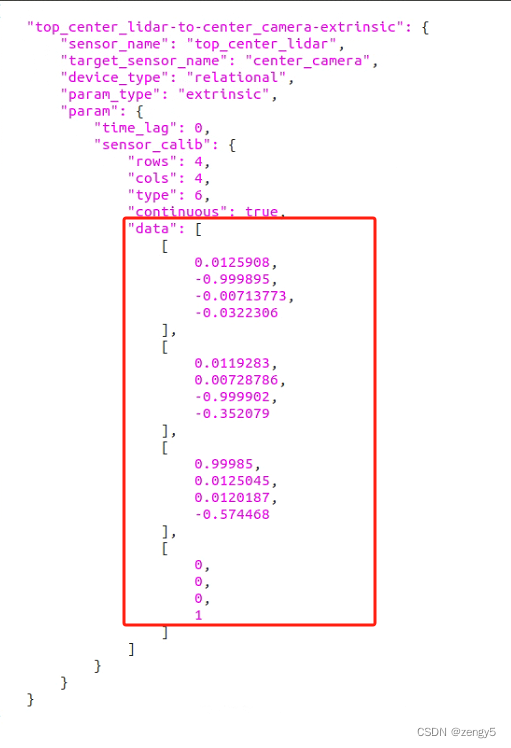
将4*4的初始外参矩阵输入。一般而言,激光雷达(特指livox激光)的坐标系为上z前x的右手坐标系,相机的坐标系为前z右x的右手坐标系,所以在不知道初始外参时,可以用以下外参进行初始化:
0.0, -1.0, 0.0, 0.0,
0.0, 0.0, -1.0, 0.0,
1.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 1.0
3.运行标定程序
学过c++应该知道,cpp文件编译之后生成一个可执行文件才是最后真正会用到的,openCalib也不例外,编译好的文件为
manua_calib/bin/run_lidar2camera

按照官方给的教程,运行该文件,并传入相应的数据和参数文件即可
cd ~./manual_calib/
./bin/run_lidar2camera \
data/0.png \
data/0.pcd \
data/center_camera-intrinsic.json \
data/top_center_lidar-to-center_camera-extrinsic.json
顺序是图片、点云、内参文件、外参文件
最好是写个bash文件将这些命令整理清楚,这样更换数据时也比较方便
运行效果:
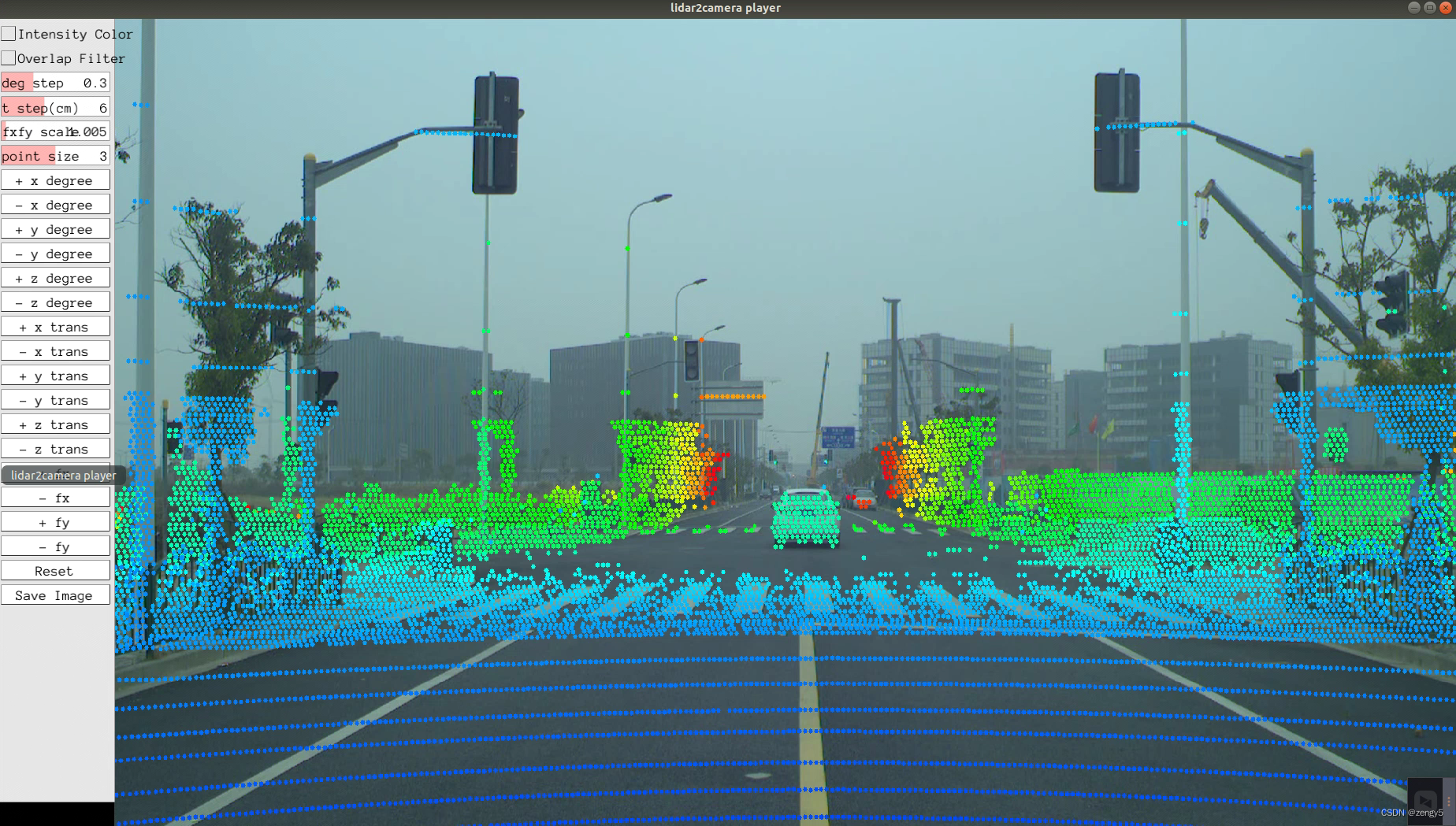
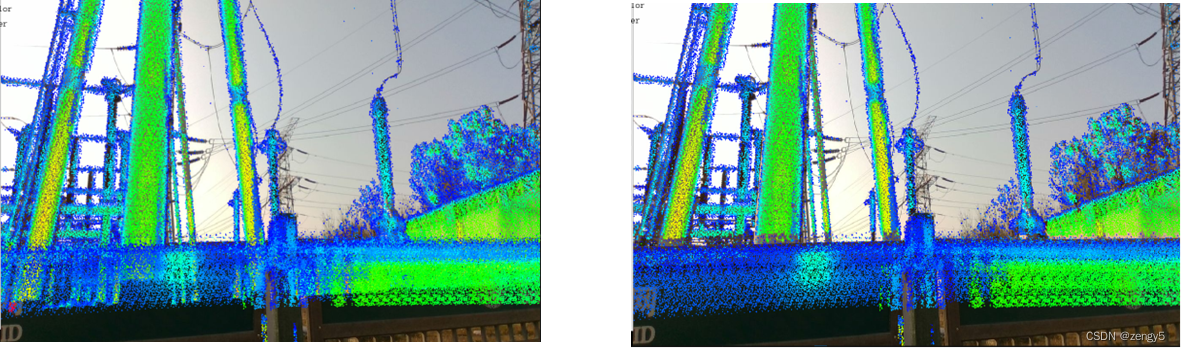
intensity color可以让颜色修改为以强度显示,overlap filter可以率除掉被遮挡的激光点,顺便进行点云降噪,如图所示
step就是每次修改旋转角度和偏移量时的步长,point size可以根据习惯适当调大调小
然后就可以点左侧栏那一堆按键来将点云和图片对齐啦,过程和结果就比较吃感觉了。
等标定的差不多了,就关闭标定界面,运行程序的终端应该会有如下显示:
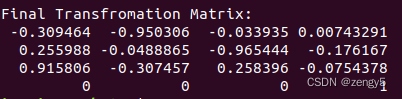
这个就是最后的标定结果了。
致谢
在此感谢港大、上海AILab和Livox官方的开源代码以及无私的开源精神。















 4249
4249











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









