






 本文介绍了激光雷达SLAM中的占据栅格地图构建算法,阐述了地图种类及其用途,强调了地图构建的重要性,特别关注了栅格地图法,包括其优缺点,以及占据栅格地图的构建流程和基本思想。
本文介绍了激光雷达SLAM中的占据栅格地图构建算法,阐述了地图种类及其用途,强调了地图构建的重要性,特别关注了栅格地图法,包括其优缺点,以及占据栅格地图的构建流程和基本思想。
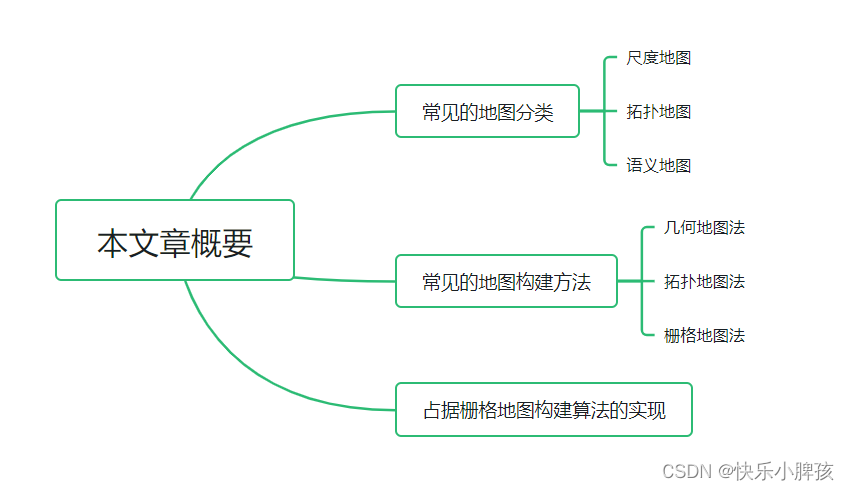
今天这篇文章主要介绍激光雷达SLAM中的一种经典的地图构建算法——占据栅格地图构建算法,下面将从地图的引入然后再详细的对该算法进行讲解。
1.地图的分类
-
尺度地图
具有真实物理尺寸的地图,但是通常按照地图的分辨率来划分尺寸,如栅格地图,特征地图,点云地图等,常用于地图构建,SLAM,路径规划等方面。

-
拓扑地图
拓扑导航基于拓扑学的原理,使用节点和边的连接关系来描述环境,构建拓扑地图。拓扑地图是一种抽象化的地图表示方法,它不需要记录精确的物理坐标和尺寸,只需记录节点以及节点之间的拓扑关系。
-
语义地图
加标签的尺度地图,公认SLAM的未来–SLAM和深度学习的结合,常用于人机交互。

2.为什么要进行地图构建
可能很多人会很疑惑,机器人为什么要进行地图构建,我们使用本身已知的地图不行吗?实际上在某些应用领域,并不提供先验地图。令人惊讶的是,大部分建筑实际与工程师提供的蓝图并不一致。即使蓝图相当准确,蓝图中也不会包括家具和其他物体,但是从机器人的角度看,却是墙或门决定了环境的形状。能够获取原始地图,就能大大减少安置移动机器人的工作量,就能使机器人在无人值守的情况下适应变化。所以,地图构建是真正自主机器人的核心能力之一。
3.常见的地图构建方法
地图构建指机器人根据传感器采集环境数据将环境完整的表示出来。常用的地图 构建方法有三种
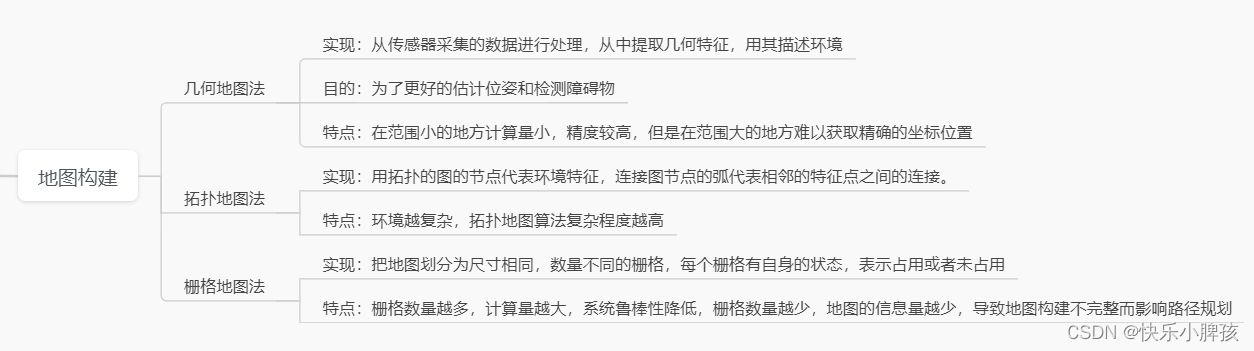
- 几何地图构建法
几何地图法是指机器人为了更方便的估计位姿和检测障碍物,对传感器采集的数 据进行处理,从中提取几何特征,并用其描述环境。几何方法在较小范围内计算量小,精 度较高,但是范围较大时,难以获取精确的坐标位置 - 拓扑建图法
拓扑地图法用拓扑的图(graph)中的节点表示环境特征,图中连接节点的弧相当于 环境中相邻特征点之间的连接。环境越复杂,拓扑地图算法复杂程度越高。 - 栅格地图法
栅格地图法[68]是指将环境分为尺寸相同、个数不等的栅格。栅格的大小也代表了栅 格数量,过多的栅格会增加计算复杂度,使得系统鲁棒性降低,过少的栅格数量会减少地 图信息量,导致构建的地图不完整而影响路径规划效果。其次需要对栅格的状态进行说明, 通常用 SLAM 方法构建栅格地图,同时该地图有利于路径规划。
4.基础知识补充
为了方便直接截图啦hhh
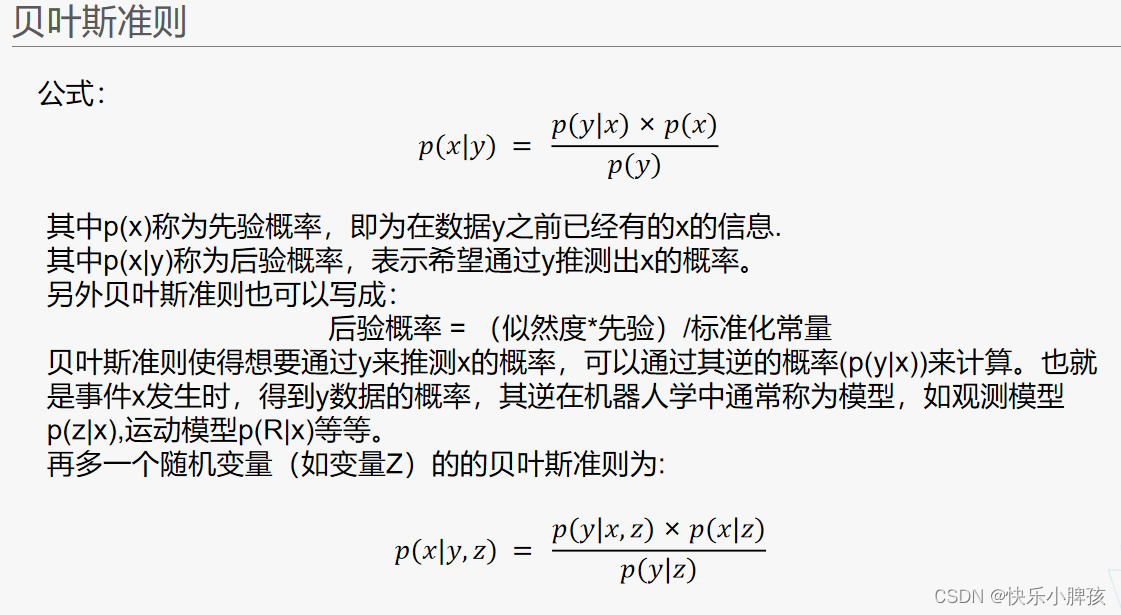
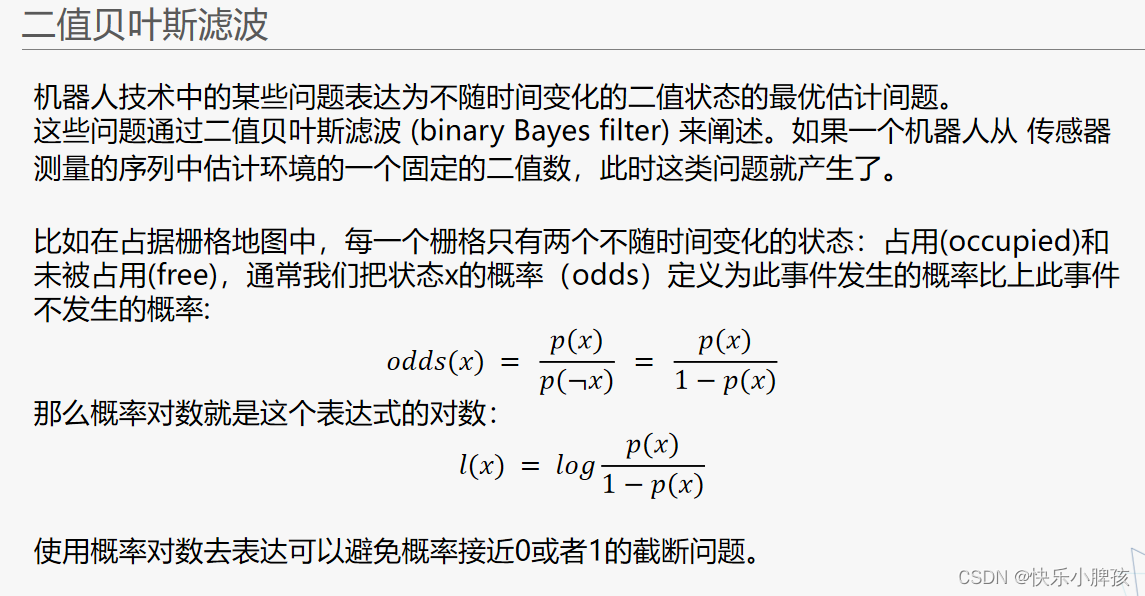
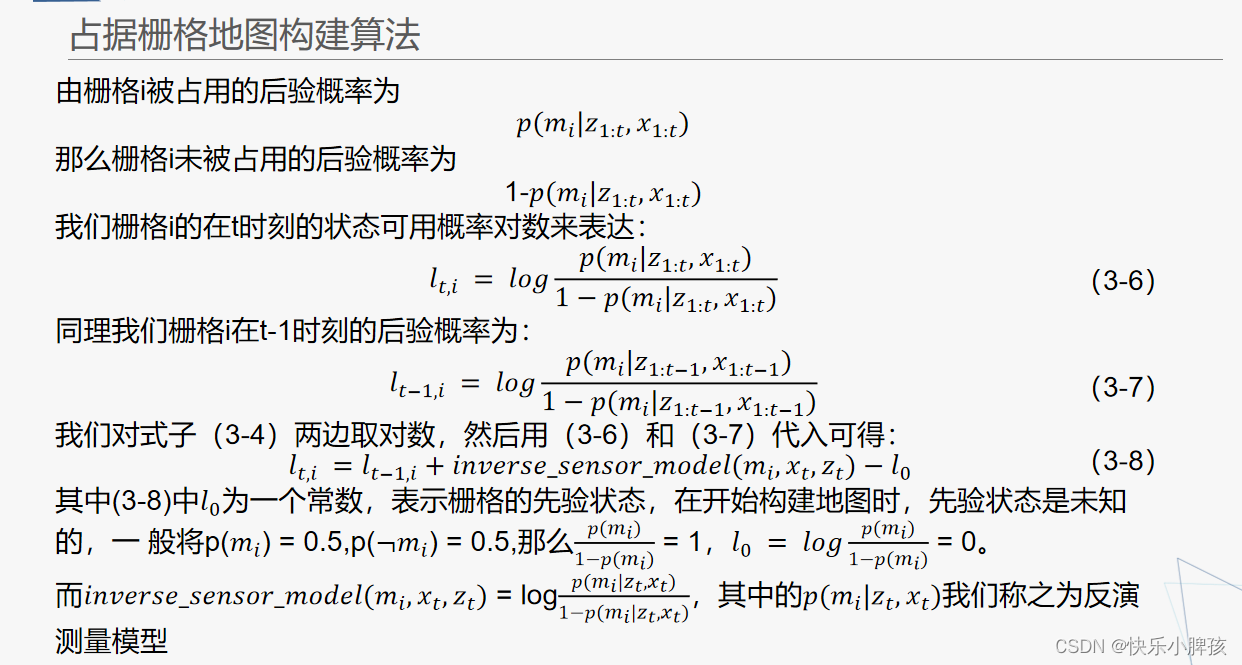
解释一下什么是截断问题,计算机的位数是有限的,当概率靠近0的时候可能位数不足够就需要舍去一些位数,那么造成了数据的不精确,而如果我们用对数表示,那么就可以避免这个问题。
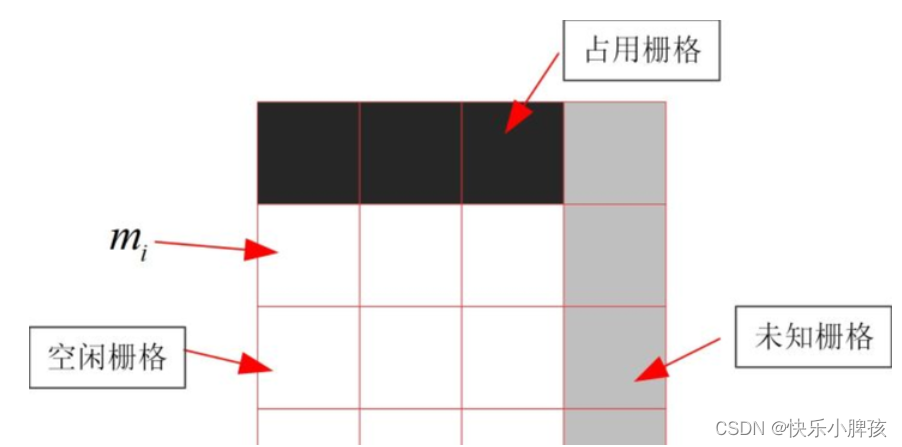
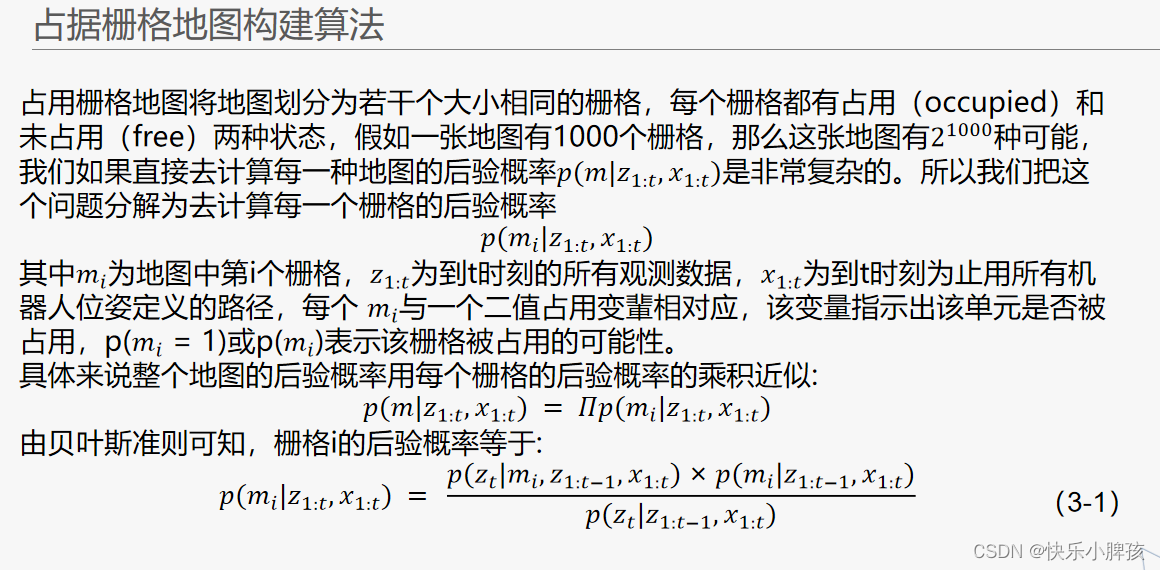
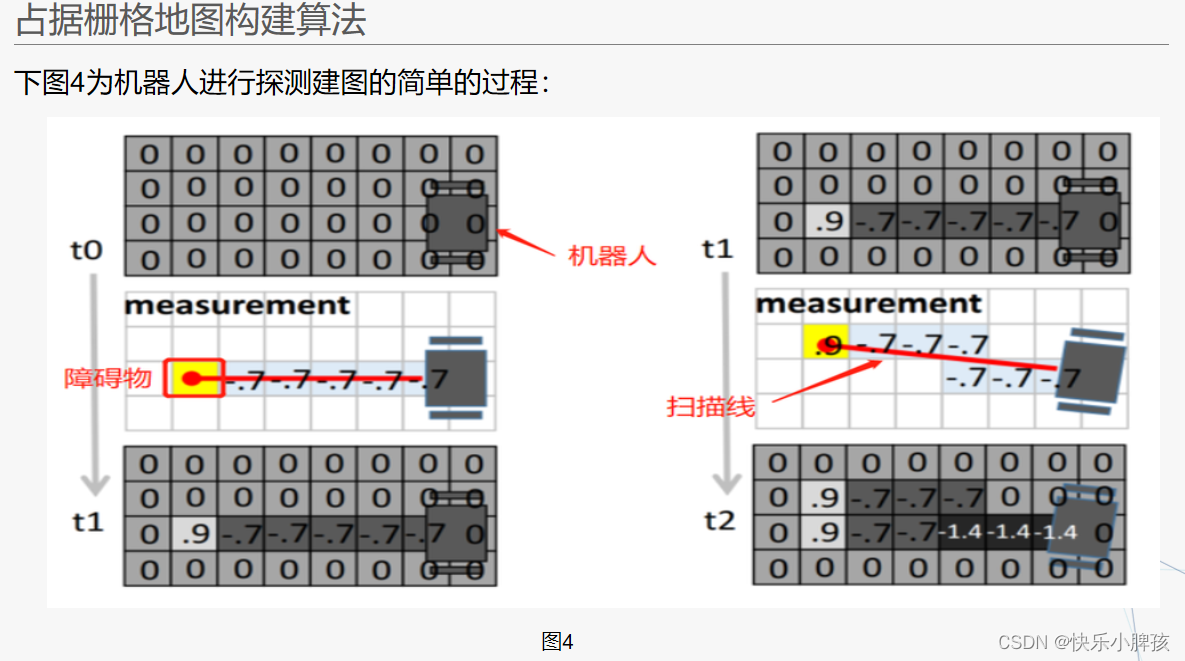
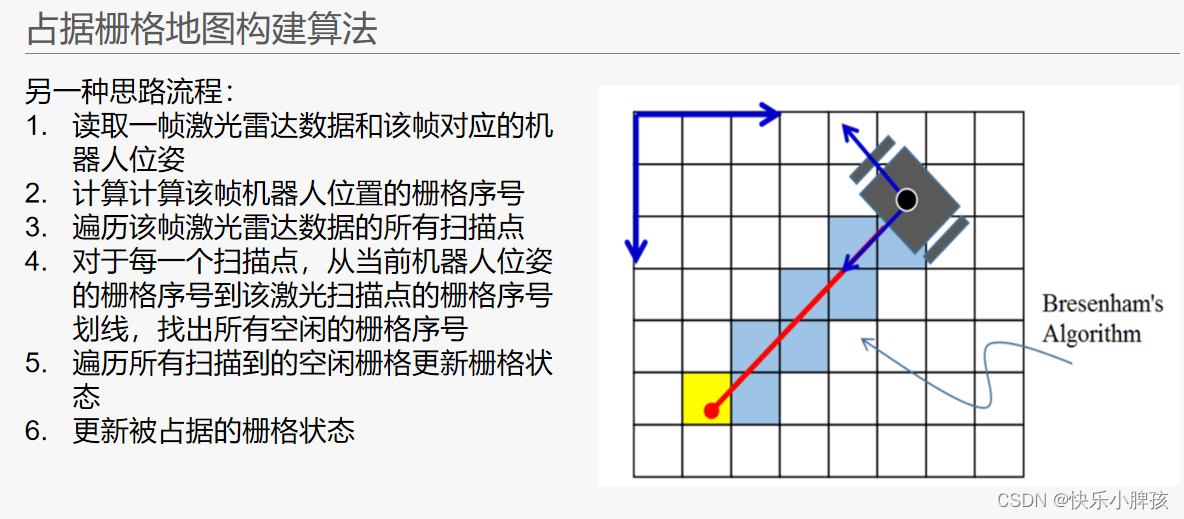
4.占据栅格地图构建算法
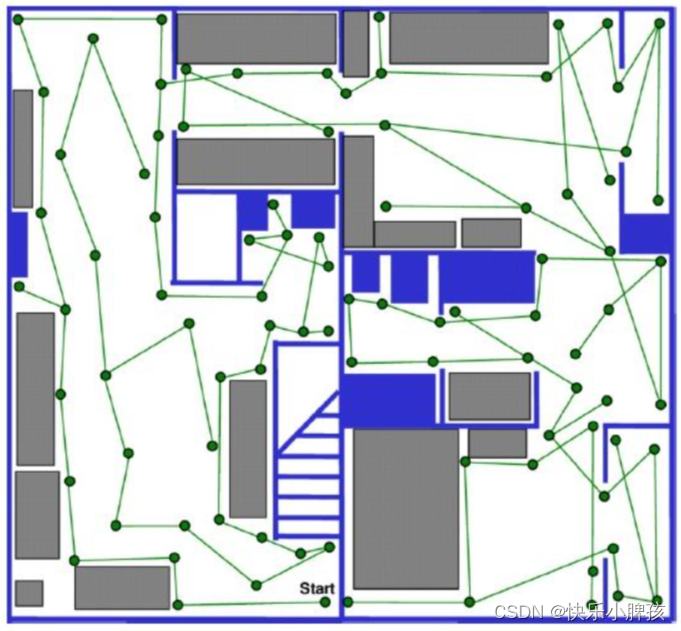
综上所示占据栅格地图构建算法是属于栅格地图法里面的一种,占用栅格地图构建描述了这样一个问题:假设机器入的位姿已知,如何利用有噪声和不确定的测量数据生成一致性地图。占用栅格的基本思想是用一系列随机变量来表示地图。每个随机变量是一个二值数据,表示该位置是否被占用。占用栅格地图构建算法对以上随机变量进行近似后验估计。下图为通过该算法构建出来的栅格地图,每一个栅格都有一种状态。
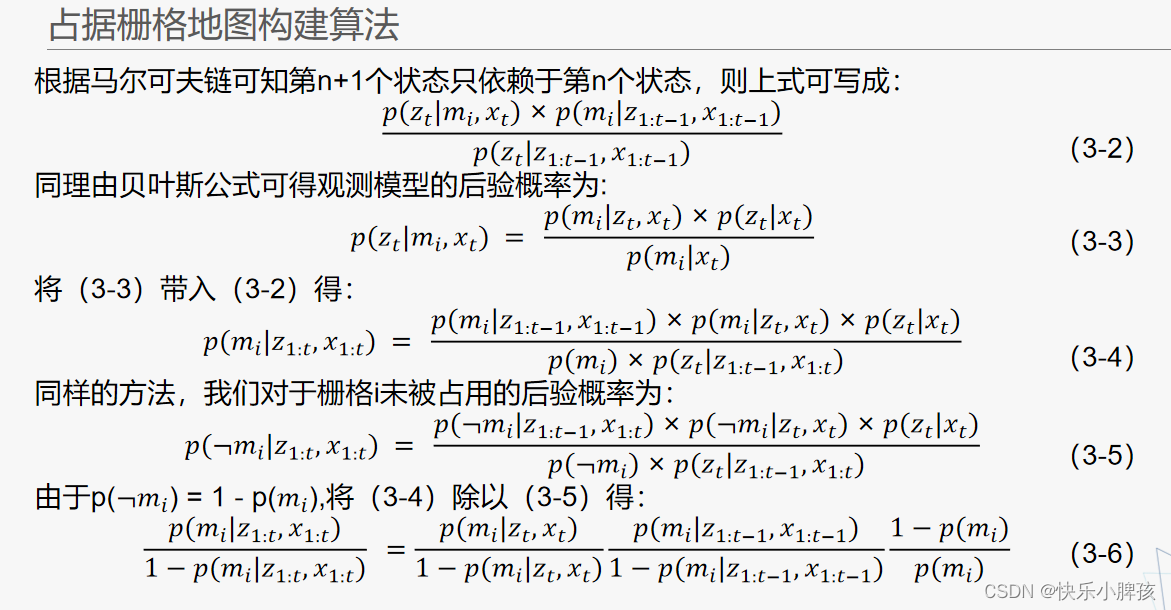
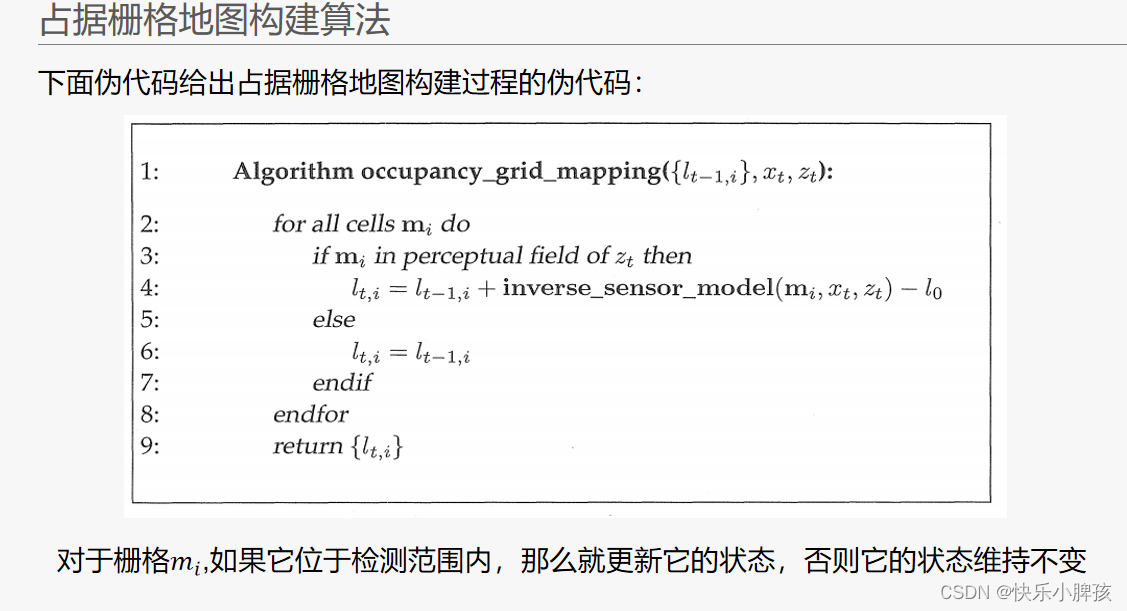
下面开始推导整个算法的流程。

















 5844
5844

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









