









1、代码包
雷达包:
https://github.com/RoboSense-LiDAR/ros_rslidarLego_LOAM算法包:
https://github.com/RobustFieldAutonomyLab/LeGO-LOAM2、环境配置
<1> 雷达连接配置,这里参考我的另一篇教程中的第一节——>网络配置
ROS1环境Robosense雷达建图调试 https://blog.csdn.net/weixin_48178539/article/details/119209958?spm=1001.2014.3001.5501
https://blog.csdn.net/weixin_48178539/article/details/119209958?spm=1001.2014.3001.5501
<2> 工程文件编译
将两个功能包 git到工作空间src下之后,此时需按照LeGO-LOAM中gtsam 的编译要求进行环境配置,此时也可将 gtsam git到当前目录下进行编译安装(安装后将gtsam 包删除即可,不删除则应使用catkin_make_isolated命令编译)——>最后进行catkin_make编译工作空间。

<3> 编译过程中可能出现的问题
问题1:——>解决方法:见博客 Lego-loam编译安装与运行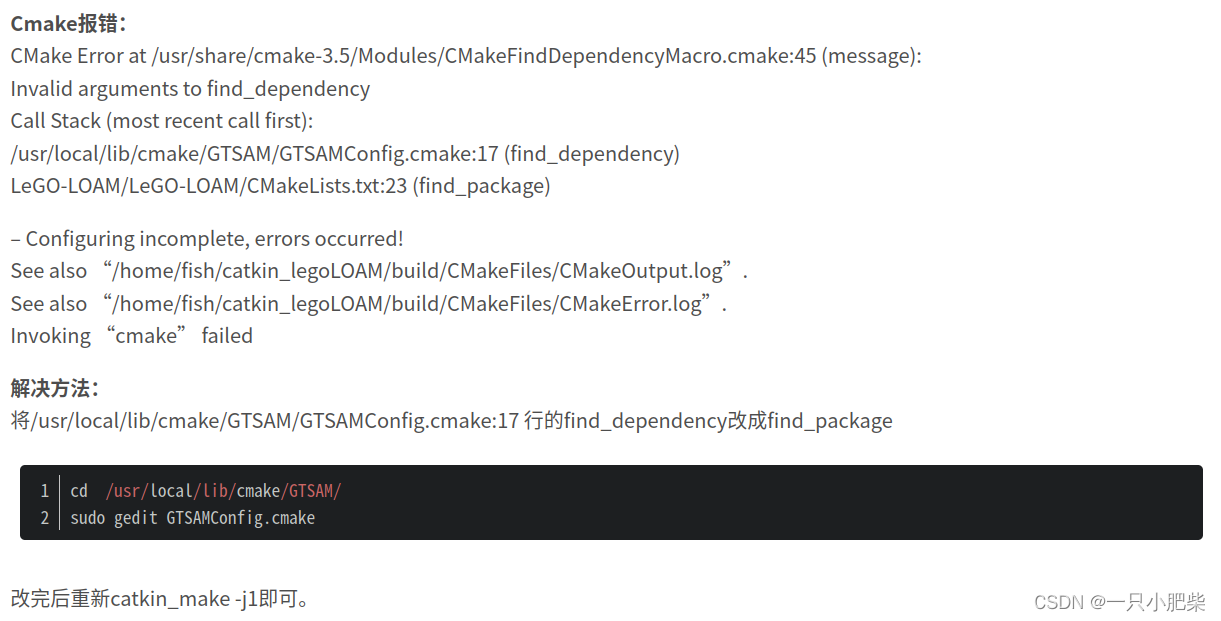
3、实时建图
由于雷达话题 rslidar_points——>velodyne_points 不同,无法建立转换关系,本博客提供两种方案 ( 推荐方法二 ):
<1> 方法一:修改LeGO-LOAM中的run.launch文件
<launch>
<!--- Sim Time -->
<param name="/use_sim_time" value="false" />
<node pkg="nodelet" type="nodelet" name="pcl_manager" args="manager" output="screen" />
<!-- Run a passthrough filter to clean NaNs -->
<node pkg="nodelet" type="nodelet" name="passthrough" args="load pcl/PassThrough pcl_manager" output="screen">
<remap from="~input" to="/rslidar_points" />
<remap from="/passthrough/output" to="/velodyne_points" />
<rosparam>
filter_field_name: z
filter_limit_negative: True
</rosparam>
<rosparam>
filter_field_name: x
filter_limit_negative: True
</rosparam>
<rosparam>
filter_field_name: y
filter_limit_negative: True
</rosparam>
</node>
<!--- Run Rviz-->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find lego_loam)/launch/test.rviz" />
<!--- TF -->
<node pkg="tf" type="static_transform_publisher" name="camera_init_to_map" args="0 0 0 1.570795 0 1.570795 /map /camera_init 10" />
<node pkg="tf" type="static_transform_publisher" name="base_link_to_camera" args="0 0 0 -1.570795 -1.570795 0 /camera /base_link 10" />
<!--- 根据雷达和小车相对位置确定 -->
<!--node pkg="tf" type="static_transform_publisher" name="base_link_to_velodyne" args="0 0 0 0 0 0 /base_link /velodyne 10" /-->
<!--- LeGO-LOAM -->
<node pkg="lego_loam" type="imageProjection" name="imageProjection" output="screen"/>
<node pkg="lego_loam" type="featureAssociation" name="featureAssociation" output="screen"/>
<node pkg="lego_loam" type="mapOptmization" name="mapOptmization" output="screen"/>
<node pkg="lego_loam" type="transformFusion" name="transformFusion" output="screen"/>
</launch><2> 方法二:修改ros_rslidar中rslidar_pointcloud下面src中的convert.cc文件,更改robosense雷达发布的话题名称

<3> 两种方法中,Rviz中都会出现点云漂移现象,具体优化方法可参考这篇博客
愤怒的马铃薯:关于lego-loam的总结(一)
4、建图运行及效果
roslaunch ros_rslidar rs_lidar_16.launch
roslaunch lego_loam run.launch
5、相关博客
1、速腾16线激光雷达运行LOAM、A-LOAM和LeGO-LOAM(方法二)
2、学习笔记之——激光雷达SLAM(LOAM系列的复现与学习)















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









