







在ROS1的学习中,我们需要使用ROS wiki中的documentation部分来进行学习——ROS wiki链接
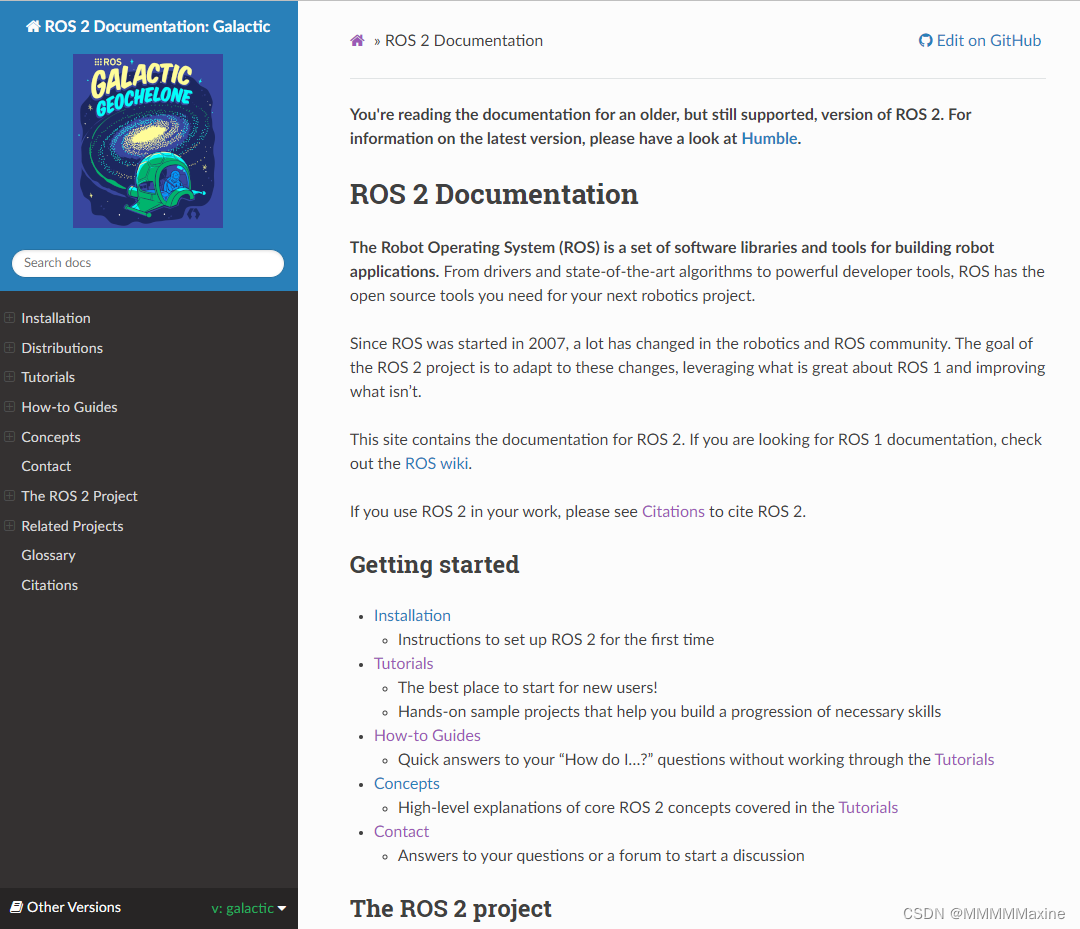
那么ROS2是否也提供了官方文档供我们学习使用呢?答案是肯定的——ROS2 Documentation链接
相比于ROS wiki,ROS2直接以Documentation页面的形式提供了从简到繁、涵盖ROS2使用多方面的教程,同时在页面安排上也有较大的不同
ROS1所使用的ROS wiki页面简介:ROS wiki系列|ROS wiki初探(自用)
本篇文章主要讲解如何借助ROS2 Documentation进行ROS2学习
1.ROS2 Documentation页面简介
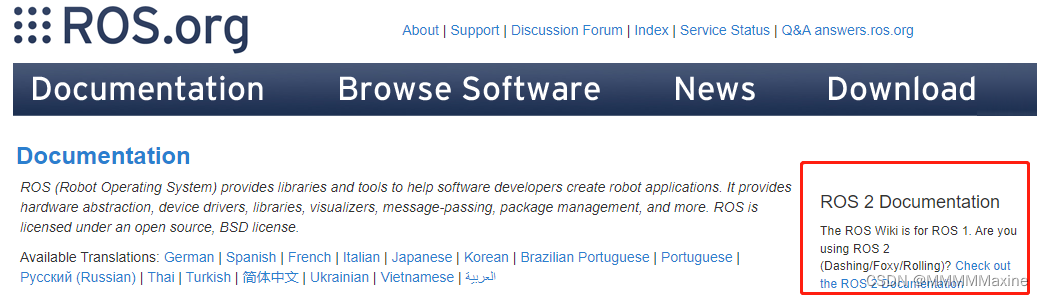
进入ROS2 Documentation页面除上面提供的链接外,同样可以使用搜索方式进入,以及可以在ROS wiki页面跳转至此:
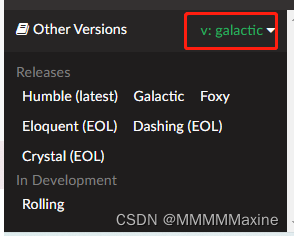
根据使用的ROS2版本的不同,Documentation中的内容也会有所不同,因此我们可以先进行版本的切换,在页面左下角有Other Versions字样,点击即可切换相应ROS2 版本:
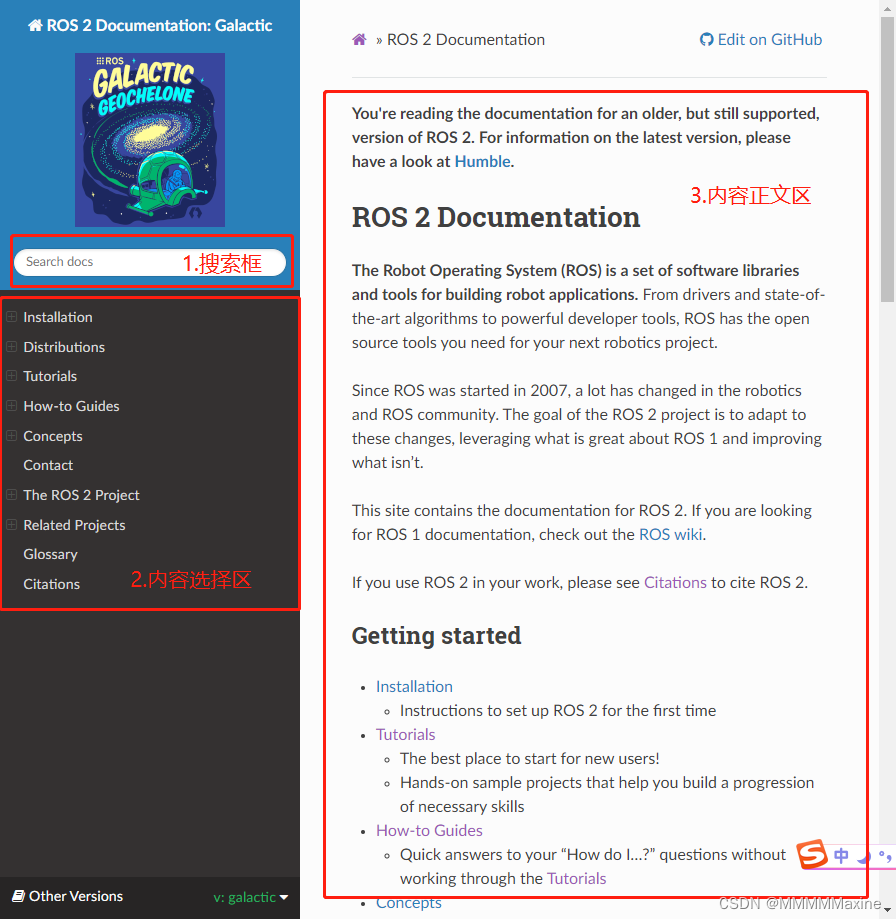
整个页面大致可以分为以下几部分:
2.ROS2 Documentation的使用
按上文提到的三部分来展开
1)搜索框
ROS wiki的搜索框已经没有了,不太清楚是出于什么考虑(但是没有搜索框肯定很难使啊喂 是想让我大海捞针还是地毯式搜索啊),不过ROS2 Documentation倒是保留了搜索框,当然了这个搜索框说实话其实也不是很好使,如果你搜索的内容不够具体或者不够吻合,你很可能搜出来一堆无关的或者跑题的东西,同时因为是html,也无法沿用ROS wiki的投机取巧搜索法了
因此如果是想要搜索,两个建议:
a.可以比较具体或者比较有针对性的输入想要搜索的内容
b.ROS2 Documentation的页面导航部分做的还是不错的,可以看目录来寻找想要查找的内容(即内容选择区)
2)内容选择区
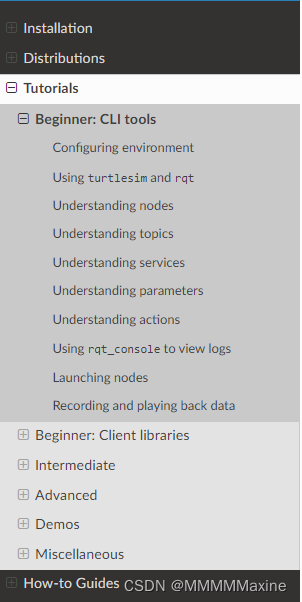
不得不说ROS2 Documentation这里做的是真的好,简明扼要一目了然,初期找教程的时候我也觉得比ROS wiki来的要快得多
内容方面分为图里这几个部分,初学者建议看Beginner的两个部分,有一定程度的学习和掌握后可以进攻Intermediate部分,目前我个人学习也只是看完了这三个部分,提供的例程都比较简单基础,建议结合实际应用例程一块学习,我能看懂这里面的内容,但我不一定能看懂实际一些ROS2 packages里的内容(手动狗头)
3)内容正文区
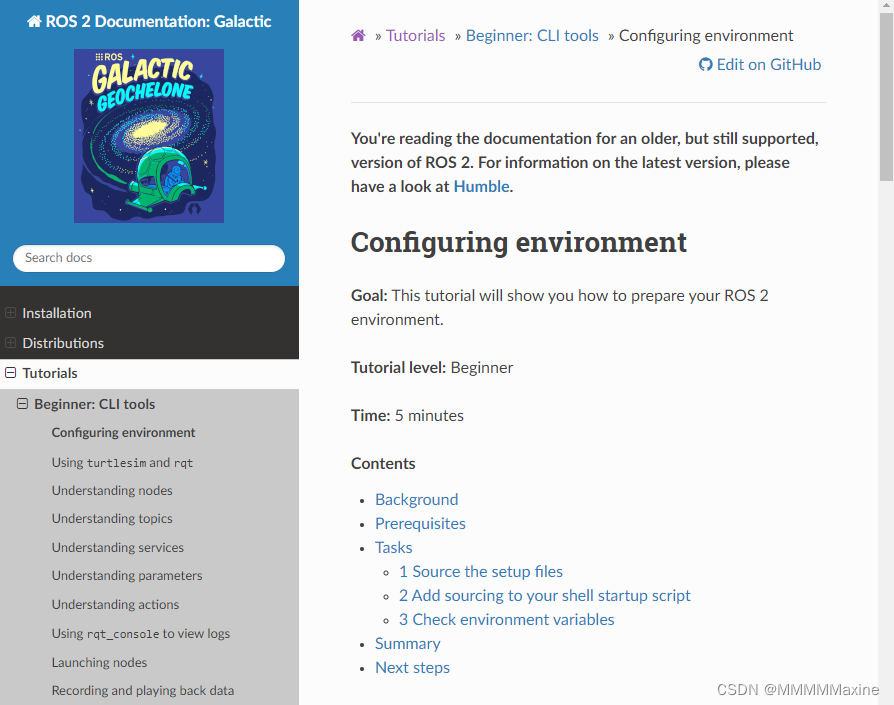
讲道理,页面里也很贴心,学习目标阅读时长都给你标出来了,妥妥的学习文档
有一个还蛮特别地方是用选项卡来代替页面跳转,例如:
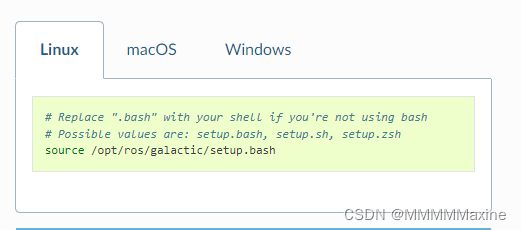
还有不同教程下的python与c++例程的切换,都是通过选项卡来完成,使用体验比ROS wiki真的好太多
3.some tips
最后稍稍补充一下,这么好使的文档除了网页端看之外还有别的方式吗?当然了,指路github→https://github.com/ros2/ros2_documentation/tree/galactic/source
我自己是在ipad上以pdf形式导入goodnotes来看,还能做标注,其他方法大家就见仁见智啦怎么好使怎么来~
好哎,又水完一篇(主要是太久没更新了又好不容易有空)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









