









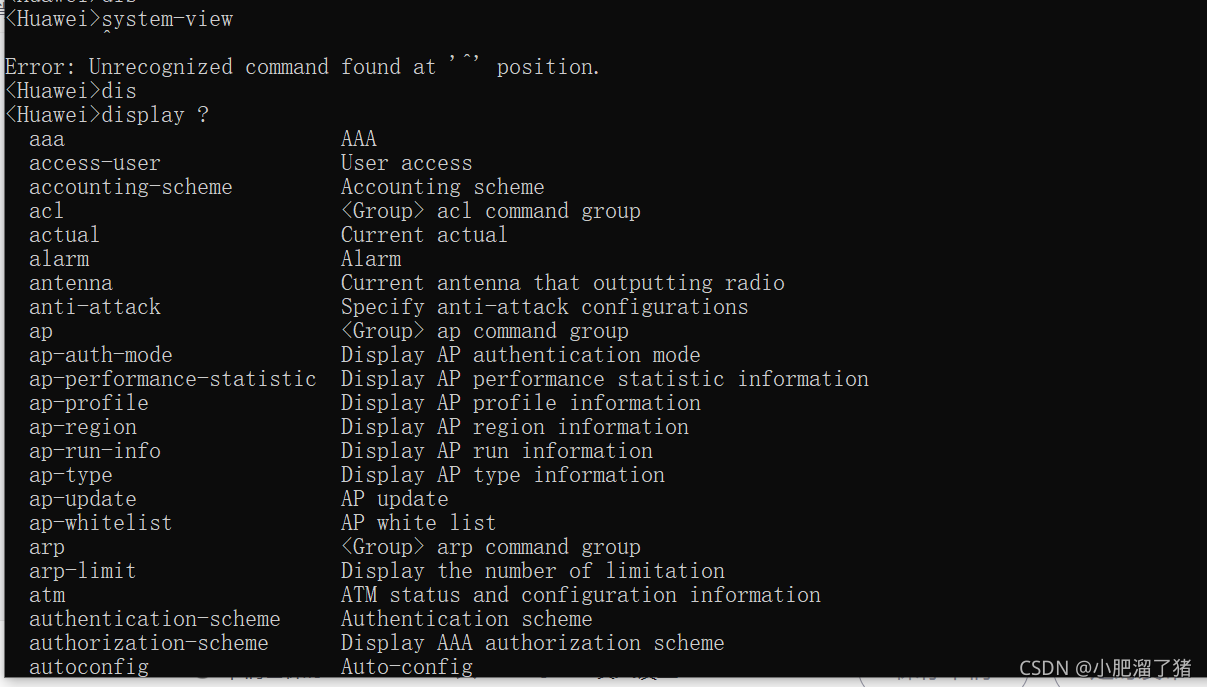
没有使用用户名和密码登录前,他们都是使用console口或Telnet连接输入密码去操作的,下面我们可以设置使用用户名和密码登录,这样不同的人登录不同的账号时有不同的权限去操作,这种登录方式就是三A认证,下面详细操作流程:
打开华为ensp软件拖入一个云和一个路由器,首先设置云,双击然后添加一个UDP网卡和一个本地网卡VMnet8如下图:
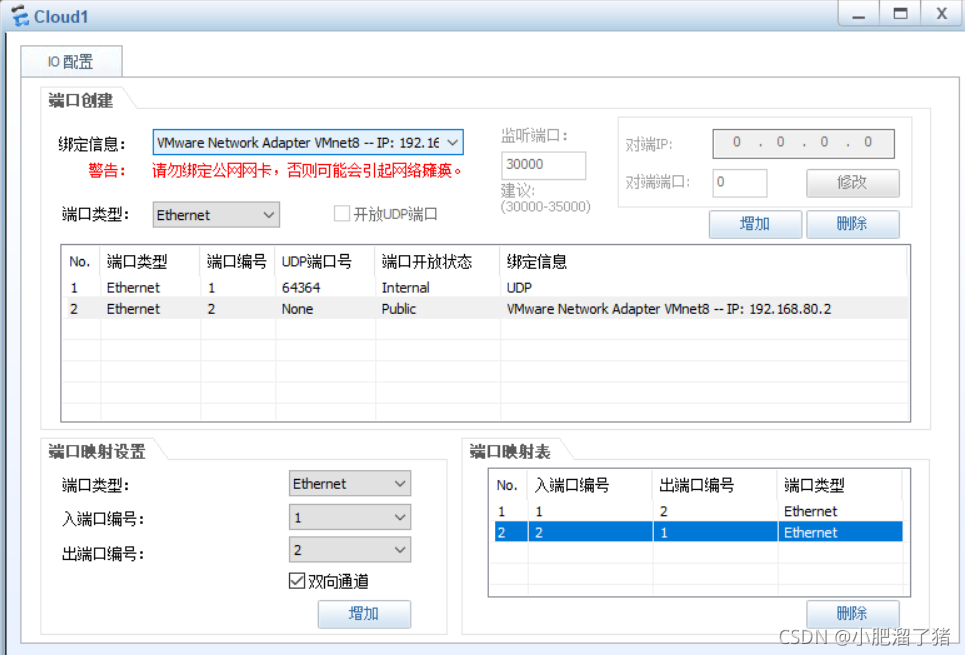
设置好后关掉界面用线将云和路由器连接,然后开机:
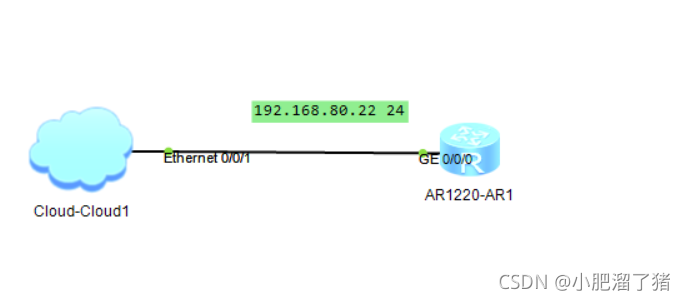
下面我们双击路由器,先给路由器接口设置IP地址,这里我的接口IP地址为:192.168.80.22 24
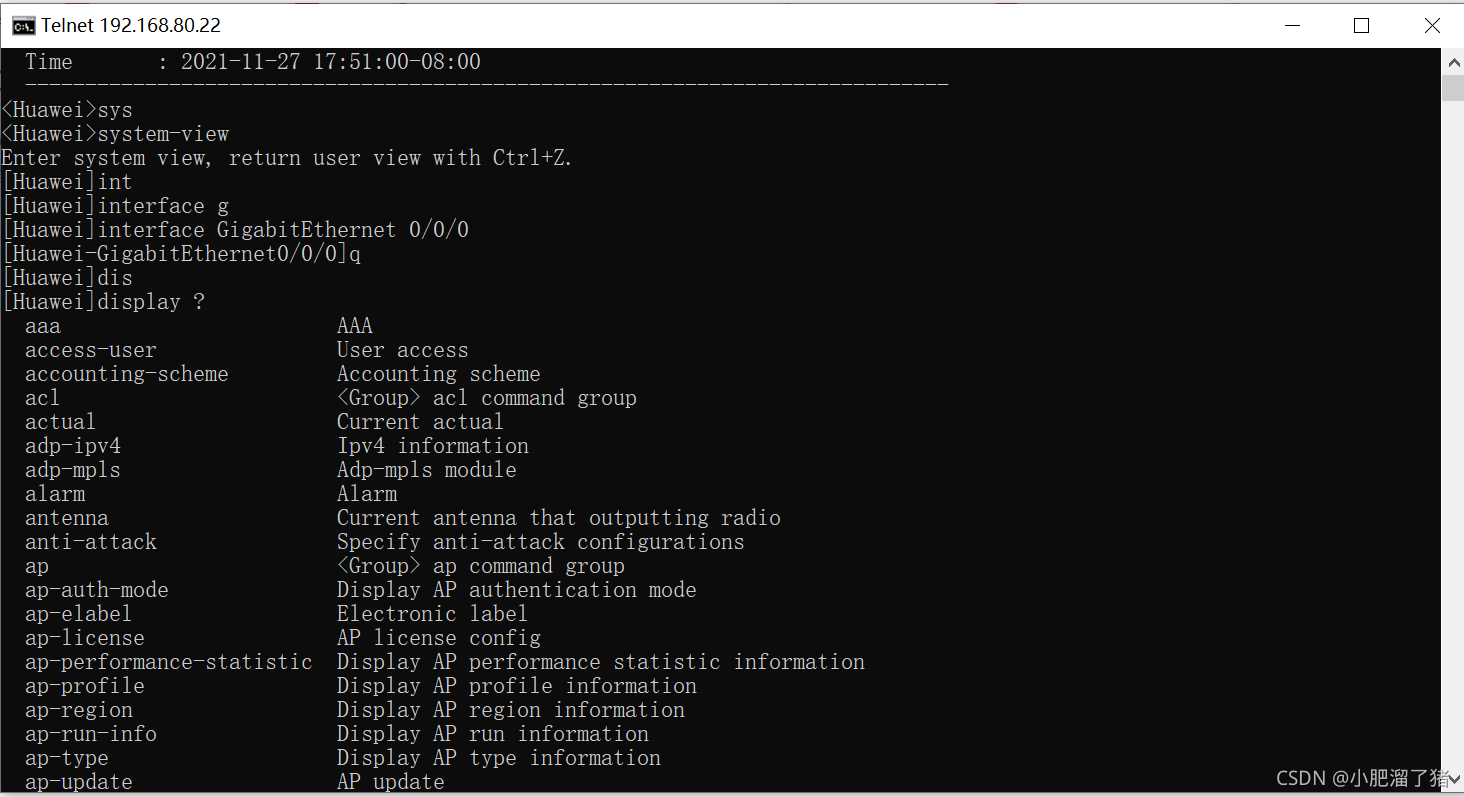
系统试图下进入接口,然后添加IP地址

设置好后我们开始设置用户名和密码登录,用户名和密码登录是属于aaa认证所以我们在系统视图下输入aaa如下图:输入完成后按回车就进入了aaa模式。

下面我们设置用户名和密码
在aaa模式下输入:local-user admin password cipher 123123
这里面我们就添加了一个admin和密码为123123的用户,这里cipher是密文模式,明文模式为simple
![]()
用户名密码设置完成后我们设置这个账户的权限
我们在aaa模式下输入: local-user admin privilege level 3
这里admin的权限为最高级3为最高级别相当于administrator级别一样
![]()
级别设置完成后我们设置登录方式
在aaa模式下输入: local-user admin service-type telnet
这里设置的telnet远程登录
![]()
配置完成后我们查看配置好的用户如下图:
这里面我们可以看到刚才创建的用户、级别、登录方式

如上图,我们在创建一个级别为1的用户test最后测试,创建用户如上
创建完成后如下图:
可以看到有一个为test权限为1和一个admin权限为3的用户

测试账户创建完成后我们设置Telnet登录认证方式为aaa认证登录
下面我们退到系统视图下
输入:user-interface vty 0 4
回车后进入Telnet远程设置
![]()
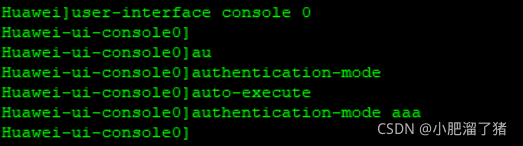
然后输入:authentication-mode aaa
认证为:aaa认证,点击回车
![]()
设置自动关闭时间为2分钟
![]()
然后退出界面,进行测试
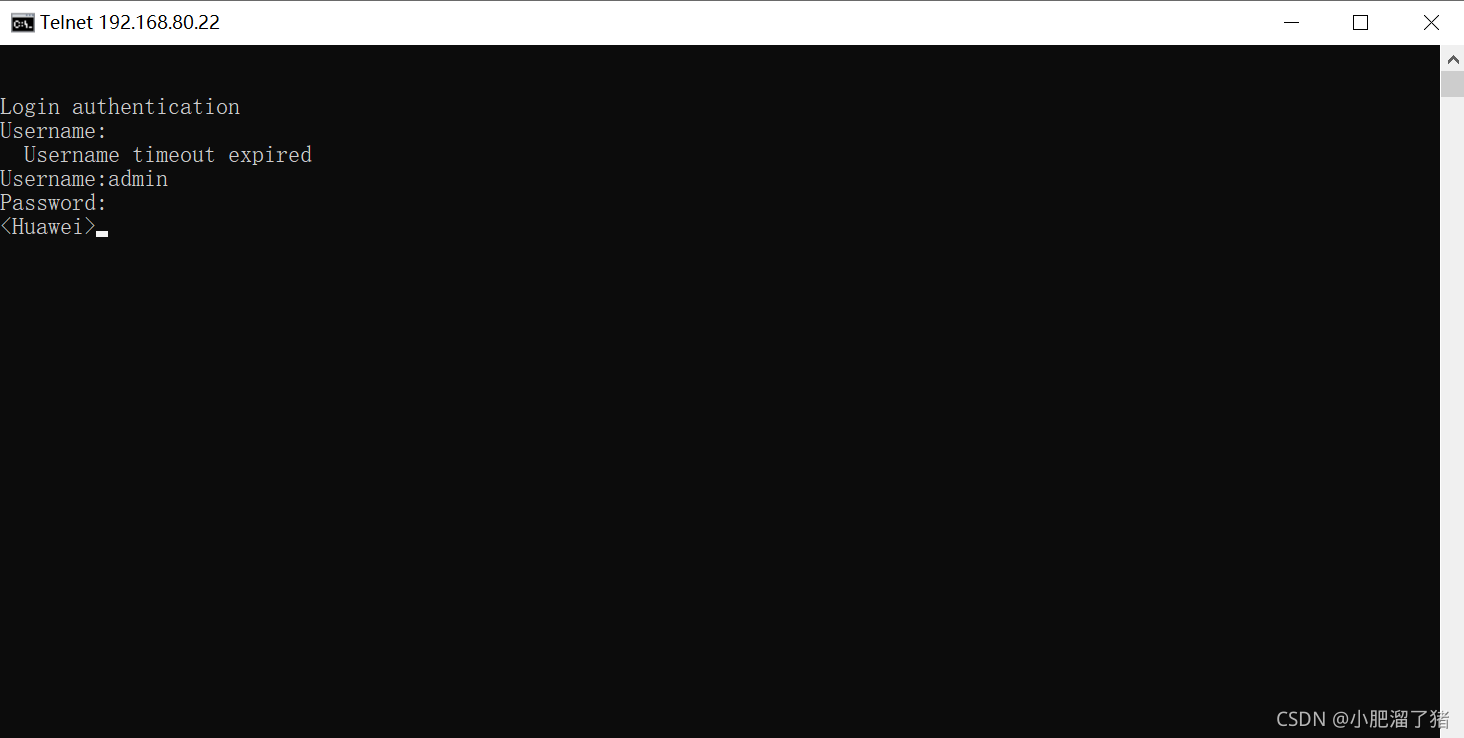
可以运行本地终端,Win+R调出运行框输入CMD点击回车,在终端输入Telnet 192.168.80.22
这里面我们可以看道跟之前的console口密码登录时不一样了。

下面输入刚才创建的用户名和密码进行登录
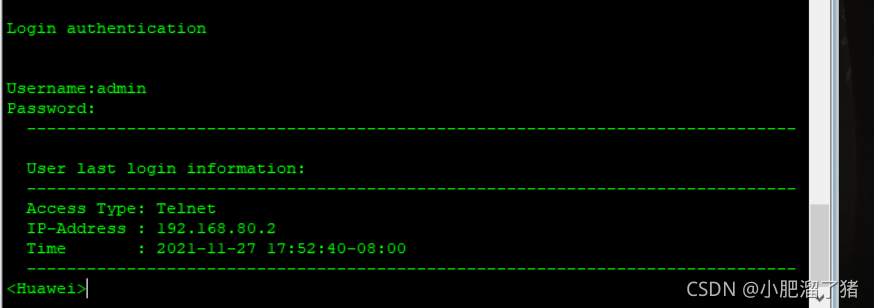
Admin用户登录:
我们admin用户是级别最高的,所以里面所有的命令都可以执行
test用户,级别为1:
这里面可以看到,这个用户只能执行查看命令,而且只能在用户视图下进行,不能做任何修改,
同样console口aaa认证与Telnet认证一样
如下图:
这里的话只要将 local-user admin service-type telnet 中的telnet改成terminal就可以了,然后进入console口配置认证为aaa认证就可以了

console口aaa认证
进入console口然后设置aaa认证就完成了
测试:退出界面后我们会看到输入用户名和密码
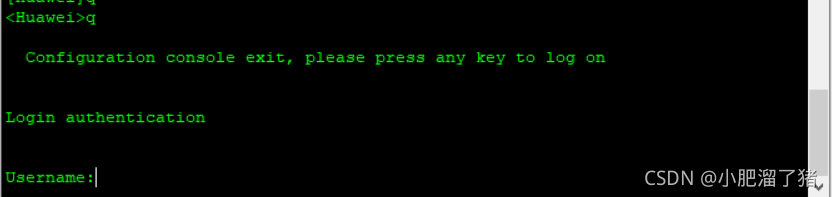
输入用户名和密码后就可以了
以上就是用户创建的方法及接口的配置


















 8836
8836

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











