







 本文详细介绍了CCD(Charge-Coupled Device)的工作原理,包括灵敏度、动态范围和信噪比。内容涵盖光注入电荷能力、填充比和势阱容量对性能的影响,以及CCD的噪音来源。此外,还讨论了电子快门、外触发非同步扫描、Binning技术以及CMOS与CCD的比较,展示了两者在动态范围、一致性、快门速度等方面的差异,并探讨了未来发展趋势和适用领域。
本文详细介绍了CCD(Charge-Coupled Device)的工作原理,包括灵敏度、动态范围和信噪比。内容涵盖光注入电荷能力、填充比和势阱容量对性能的影响,以及CCD的噪音来源。此外,还讨论了电子快门、外触发非同步扫描、Binning技术以及CMOS与CCD的比较,展示了两者在动态范围、一致性、快门速度等方面的差异,并探讨了未来发展趋势和适用领域。
6-5 CCD的灵敏度、动态范围和信噪比
6-5-1 CCD的灵敏度
CCD将光能转换成电荷的效率(又称光注入电荷能力)取决于多个因素。光注入电荷
Qin=k·A·Noe·ttotal (1)
式中,Qin为注入电荷量;k为固定系数;A为光敏单元的受光面积;Noe为入射光的光强;ttotal为光注入时间。
从上式可以看出,k和半导体材料有关;A和CCD的晶片尺寸和结构有关,k和A决定了该摄像头的灵敏度,尤其是受光面积A,更是影响灵敏度的关键;Noe与入射光的光谱和光强有关。在k及A都确定后,光注入的电荷就只和Noe和时间ttotal成正比了,也就是说和投影到光敏像元上的光强度和光照的累积时间成正比。控制累积时间ttotal,就是控制CCD的曝光时间,为CCD设计电子快门提供了基础。
摄像头的灵敏度和动态范围一样,与噪音有关。假设噪音的方差σ等效于100个光电子,那么为了保证从噪音中检出信号,信号至少应大于3σ才能较稳定地被检出,也就是最小可检出信号,即灵敏度应为300个光电子。现代CCD图像传感器芯片的灵敏度已几乎能达到1个光电子了。
6-5-2 CCD的动态范围
在CCD摄像头的说明书中经常见到两个与动态范围有关的重要参数:填充比(Fill Factor)和势阱容量(Well Capacity)
6-5-2-1 填充比(Fill Factor)
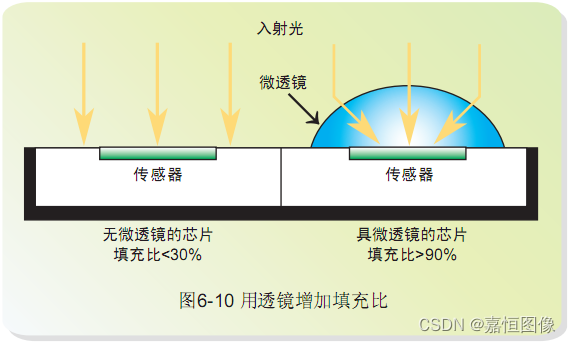 在一个像元所占有的整个区域内,对入射光敏感的区域只占总区域的一部分,光敏感面积和像元总面积之比为填充比。这是因为在一个像元区域内,除对入射光敏感的区域外,尚有与敏感区相配合的单元,例如在隔行转移型(ILT)结构的CCD中,每一个像元都有一个电荷移位寄存器和一个转移栅与光敏二极管放在一起,用来转移光敏区的电荷。(见6-1-3节)。这部分非光敏区域被不透光的薄膜所覆盖,使其不受外来光线的打扰。6-5-1节的光注入电荷的公式已表示,CCD的灵敏度是和A成正比的,所以填充比直接反映了CCD的灵敏度。
在一个像元所占有的整个区域内,对入射光敏感的区域只占总区域的一部分,光敏感面积和像元总面积之比为填充比。这是因为在一个像元区域内,除对入射光敏感的区域外,尚有与敏感区相配合的单元,例如在隔行转移型(ILT)结构的CCD中,每一个像元都有一个电荷移位寄存器和一个转移栅与光敏二极管放在一起,用来转移光敏区的电荷。(见6-1-3节)。这部分非光敏区域被不透光的薄膜所覆盖,使其不受外来光线的打扰。6-5-1节的光注入电荷的公式已表示,CCD的灵敏度是和A成正比的,所以填充比直接反映了CCD的灵敏度。
为了充分扩大低填充比CCD的有效的受光面积,特别是在ILT结构中,可以使用一个微小的凸透镜盖在每一个像元上,见图6-10,以便增加有效的填充比例。但必需指出,这种微小的透镜对紫外线部分有较大的衰减。
6-5-2-2 势阱容量(Well Capacity)
这是像元光敏二极管势阱收集并保存电荷的容量的一个参数,势阱容量给出了CCD对强光源无饱和感应的能力,给出了 CCD动态范围的上限。一般来说,像元面积和填充比例越大,CCD灵敏度越高,势阱容量也越高。所以势阱容量是一个很重要的参数,它是CCD动态范围的决定性因素之一。
6-5-3 CCD噪音与信噪比
前面已经提到,动态范围取决于两个因素,一个是正确反映图像中最亮和最暗区反差的能力,它就是上节所述的势阱容量,它反映不饱和接受入射光的最大亮度;势阱容纳电荷的最大能力;或者是CCD输出的最大有用电压。
另一个是CCD反映图像灰度微小变化的能力。影响这个能力的因素是随机噪音。那些小于噪音的微小灰度变化,被噪音淹没了,已不能被机器视觉系统区分出来。
CCD摄像头的噪音来自两个地方:CCD图像传感器芯片和芯片外部的外围电路如放大器、A/D转换等等。
6-5-3-1 CCD图像传感器芯片内的噪音:
a. 光注入、电荷耦合转移、电荷/电压转换等过程中产生的电荷的随机变化;
b. 暗电流:在无光照的情况下,由于热激发而产生的电子随机运动。
6-5-3-2 CCD芯片外围电路噪音:
放大器、A/D等内部电压的随机起伏变化;它们相互间的信号连接线,甚至于电源受外部干扰而产生的噪音。
在这里我们顺便提一下,即使是用同一种CCD芯片,不同厂家生产出来的CCD摄像头,由于其所采用外围芯片的差异、电路设计和布局等因素,摄像头最终的输出视频信号中的噪音大小也会有较大的差异。
如第5-1节所述,把两个动态范围的概念结合起来,就是信号和噪音之比,取决于势阱容量的视频的最大不饱和电压和各种噪音之和的均方差的比例
其中S为视频输出的最大电压和最小电压之差,N为噪音的均方差。SNR用分贝(db)表示。
6-6 CCD的逐行扫描、电子快门和外触发
机器视觉系统的最大特点之一是被监控物体是运动的,要清晰地获取运动物体,就需要减少CCD的曝光时间ttotal,并且什么时间开始曝光应该是可控的,应该根据物体运动至视场FOV中央的时间来确定。
6-6-1 逐行扫描
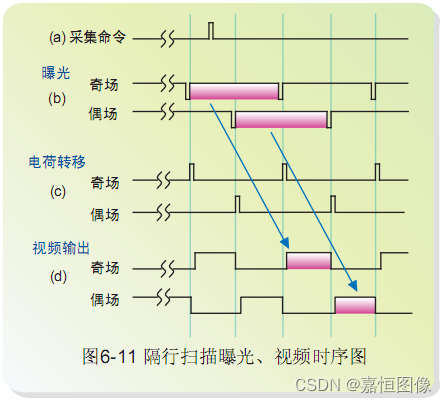
第3-1-3节已介绍了CCTV隔行电视信号的扫描方式(图3-1和图3-2)。这种扫描方式的CCD的曝光时间见图6-11,图中未对曝光进行控制,图6-11(b)表示奇、偶场的曝光时间,图6-11(c)表示光敏像元曝光结束,转移栅用传送脉冲将像元电荷转移至电荷移位寄存器,这个传送脉冲很短,它同时对所有的像元作这种转移。转移结束后,光敏像元又可以对下场图像进行曝光,同时,电荷移位寄存器将代表图像的 电荷阵列逐行移出,并转换成视频电压输出,见图6-11(d)。
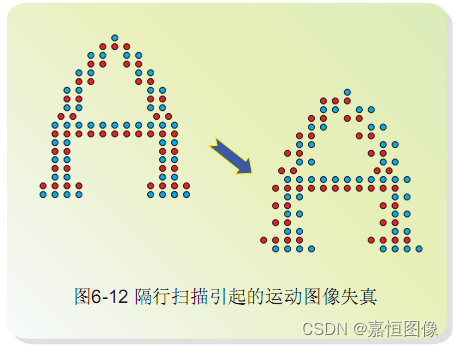 从图6-11可以看出,奇偶场图像的曝光期间是交错的,所以,它获取的不是运动物体在同一时间段曝光的图像。奇偶场图像合并在一起时,形成了所谓的运动撕裂,图6-12,在机器视觉系统中,这种失真是很严重的。
从图6-11可以看出,奇偶场图像的曝光期间是交错的,所以,它获取的不是运动物体在同一时间段曝光的图像。奇偶场图像合并在一起时,形成了所谓的运动撕裂,图6-12,在机器视觉系统中,这种失真是很严重的。
 消除这种失真的最有效的办法是逐行扫描,逐行扫描摄像头可以和CCTV摄像头一样具有相同的分辨率,但扫描方式不是隔行的,而是逐行的。
消除这种失真的最有效的办法是逐行扫描,逐行扫描摄像头可以和CCTV摄像头一样具有相同的分辨率,但扫描方式不是隔行的,而是逐行的。
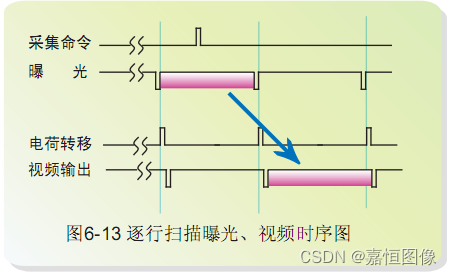
将CCD做成隔行或者逐行扫描,比起真空管摄像头来容易多了,它的曝光、转移和视频输出见图6-13,从图中可以看出它们之间的动作就简单多了,所有像元不分奇偶行,同时曝光,视频输出和曝光时间相差一帧时间。
 6-6-2 电子快门
6-6-2 电子快门
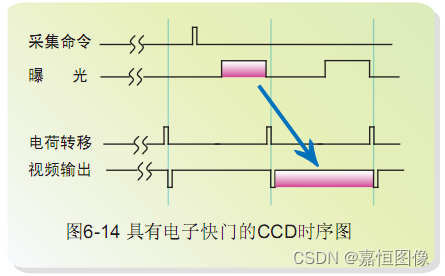
图6-11和图6-13所示的CCD曝光时间都持续了一帧时间,这长长的曝光时间,使速度快的运动物体模糊了,所以应根据物体的运动速度改变曝光时间,也就是可变的电子快门。CCD摄像头快门曝光的时序见图6-14,图中的曝光时间基本连续可调, 从10微秒至几十毫秒。曝光期间紧挨在转移脉冲前面,也可以说转移脉冲结束了曝光。
我们必须注意,电子快门的曝光时间的变化,仅仅改变了CCD光敏像元对外来光的感应时间,但不会改变CCD内在的视频读出扫描过程和周期。
电子快门的调节可以用CCD摄像头上的开关组合来实现,也可以通过CCD摄像头上的串行总线来控制。这种非机械式的、具有很大的灵活性的快门控制,给视觉系统带来了极大的好处。
对于运动物体来说,快门时间越短,所获取的图像越精确,即越不模糊,但过短的曝光时间会使光照强度大大提高,给光照技术带来很大的困难,所以应选择合适的快门时间。快门时间与物体的大小、运动速度、物体至镜头的距离等因素有关,特别是和机器视觉系统对获取图像
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3795
3795











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









