






<声明>学习记录类文章,若有理解差池或其余相关知识拓展欢迎留言指正。
1. 无刷电机的原理
(a) 无刷电机实体的抽象化


(b) 无刷电机驱动电路及控制

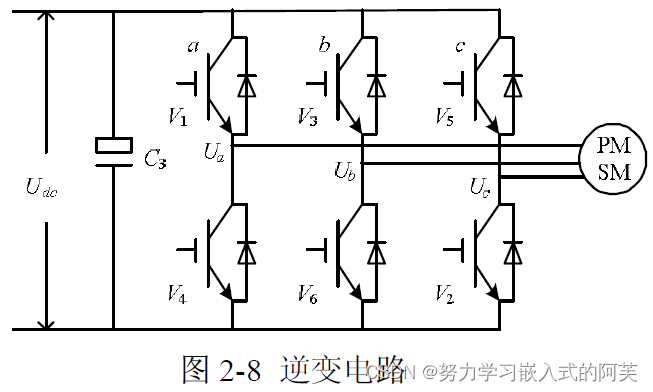
通过对MOS/IGBT(开关)的导通控制,在定子线圈上合成不同方向的磁场,方波控制策略,或称为BLDC控制会合成六个方向的磁场,此时通过有感/无感对转子位置的观测,在恰当的时间切换磁场方向,使转子转起来 。所合成的磁场不仅方向可控,大小同样可控,可完成对电机的运动控制(转速,扭矩)。
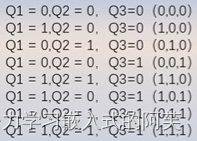
通过对驱动电路MOS管的开关操作,共可产生8个基本磁场(不考虑磁场合成),其中有(0,0,0)和(1,1,1)两个零磁场,若控制器仅合成六个基本磁场(不考虑零磁场)则控制策略为方波控制六步换向。
六个基本磁场合成后,若切换磁场方向时机与转子运动时机相吻合(转自运动位置决定换向时机而非换向时机决定转子位置!),则转子会经由定子磁场拖动一个电周期,若电机的极对数为n,则转子转动1/n个机械周期(圈/一转),一般统计转子运动的单位使用rpm(转/分钟)。
(c) 实现对磁场的精确控制
在大多数应用下,六个方向的基本磁场并不能满足业务需求(机器人关节控制,伺服应用等)此时诚然可以增加电机的极对数让每个磁场作用对应的机械角度更小,但多极对数的电机会带来其他问题(电机制造工艺,成本),所以我们一般采用SVPWM技术合成所需的磁场,SVPWM原理上与PWM相同,也就是伏秒平衡原理(12V * 50%占空比 ≈ 6V)
2.SVPWM
(a) SVPWM
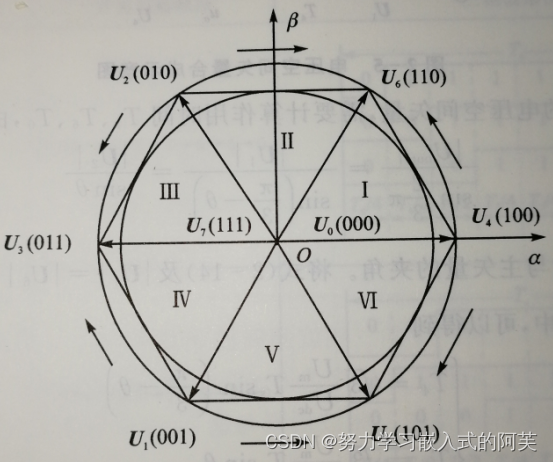
对于三相全桥合成的8个方向的基本磁场,对应的定子位置如下图,其横轴为α,纵轴为β,其α轴与一电机定子重合,此坐标系在FOC内被称为两相静止坐标系。 SVPWM的作用是实现使用两个基本矢量(磁场)合成一个不存在的矢量(磁场),实现磁场矢量定向控制(Field Oriented Control),所以SVPWM的输入应为对所需要合成的磁场的描述,在两相静止坐标系内就是(α,β)或者(cosθ,sinθ)其中,θ为所需要合成的磁场与α轴正半轴的夹角。

若想实现SVPWM的函数,其逻辑应为:

(1)判断矢量所在扇区,也就是判断 用那两个基本矢量合成目标矢量
(2)计算作用时间,根据伏秒平衡的原理,两个基本矢量作用不同的时间合成目标矢量
(3)分配计算出的时间给三相桥臂,计算出在一个PWM载波周期周期内,低电平导通时间的一半,也就是T0,T4,T6,T7。

(4)计算占空比,计算每个桥臂应该导通的时间
(5)MCU底层配置输出,完成驱动,电机产生磁场
(b) d轴-q轴坐标系
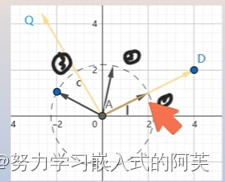
若以想要合成的磁场作为d轴-q轴旋转坐标系的d轴,而逆时针90°为q轴坐标系,假定目标矢量与α-β的夹角为θ,则此磁场在α-β坐标系下表示为(1*cosθ,1*sinθ),在d-q坐标系内表示为(1,0)
(c) 反park变换
将d-q坐标系内的矢量磁场换算到α-β坐标系下,使用如下旋转矩阵表示,这个变换的过程称为反park变化。
![]()
(c) 反park变换 + SVPWM
将SVPWM的输入改为矢量在d-q坐标系内的表示形式,通过反park变换确定在α-β坐标系下矢量方向及大小

3. clark变换和park变换
(a) 反park变换 + SVPWM
 4. FOC控制框图
4. FOC控制框图
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









