







 本文介绍了作者自制的一套FOC驱动器,从硬件选型到软件实现进行了详细说明。使用STM32F103单片机配合SMO滑膜观测器实现了电机的精确控制,并提供了三种控制模式。
本文介绍了作者自制的一套FOC驱动器,从硬件选型到软件实现进行了详细说明。使用STM32F103单片机配合SMO滑膜观测器实现了电机的精确控制,并提供了三种控制模式。
小时候玩航模了解到无刷电机,又从方波控制了解到FOC控制,在接触了一些开源项目的时候,感叹做的真好,不论是方波的还是Foc的启动都是那么丝滑,软件做的虽然好,但在这几年电机驱动芯片和部分型号的单片机价格都居高不下,做一个低成本的Foc驱动器利用网上开源资料已经不够用了。
ky_motor Foc 测试视频
假期趁着有时间做一套Foc驱动器,从硬件到软件,从夏天到冬天,真是不容易,总算差不多了。
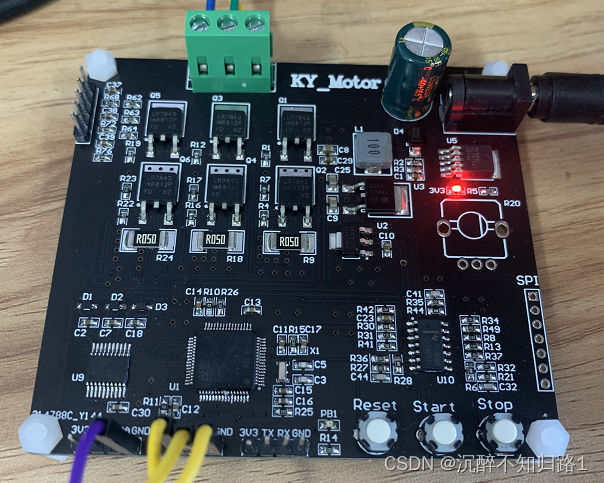
开发板:开发板链接
硬件选用了STM32F103单片机,程序内容并不是很多,103c8,103rb都可以满足需求,为了后期可以扩展资源,我选用了rbt6,价格大约16元一颗,不是用的ST电机库,因此程序可以移植到国产芯片上,不过我没有移植过,毕竟我不太相信国产芯片(个人观点)。
驱动芯片选用的EG2134,没什么可说的,就是图便宜,一颗大约1.5元,比国产的峰绍还要便宜个几毛钱,这难道不是我选它的理由吗?
运放选用的是LM324,也是几毛钱的物料,追求更好的效果可以选用精度更高的运放,而不是我选用的这个玩具级,运放采样做的是一个差分输入的方式,看电流波形还可以。
Mos用的是Irlr7843,性能很好的一颗mos,以前做航模的时候总用这个mos,就是假货比较多,我这个板子也没打算跑太大的电流,因此这个Mos不论从价格还是从性能,都能满足我的需求。
三个控制按键,复位,开始,停止。实际的程序样式也是按start电机开始转动,按stop电机停止转动,复位键用于debug调试使用。预留一个电位器接口,用来调速。
电阻采样用了三颗0.05R的采样电阻,通过三电阻采样的方式保证了电流采样的精度(当然,运放有些拉跨)。
剩下的就是辅助电路了,预留了IIC接口,SPI接口,后期方便加传感器或者OLED。
硬件介绍完了,剩下的就是软件部分了,当然也是最精彩的部分了,篇幅有限,我简单介绍一下功能,后面有时间我会在专栏里给大家详细的讲解一下Foc的控制方法。
使用了SMO 滑膜观测器,SMO代码精简,性能稳定,值得多花一些时间对其进行改进。比如,在反电势滤波方法上。SMO参数调整相对来说比较简单,实际调试电机过程中能很快的调出让电机稳定运行的参数。有没有参数更容易调整的观测器?有的,对传统滑模观测器添加一个自适应律,得到自适应滑模观测器。当然,最重要的还是我比较擅长SMO,其他的都不重要。
控制模式上写了三个模式,Hallloop(霍尔闭环),SMOloop(滑膜闭环),Openloop(开环)这三个模式。我先把这部分代码贴上来,后期测试的视频我在传上来。
Openloop
void Motor_IFStart(void)
{
Angle_Acc(Angle);
AngleSin_Cos.IQAngle = Angle.Set;//角度
pi_iq.Ref = IqStart; //启动电流设置
ADC_Sample();//采集电流 得到UV电流
AngleSin_Cos.IQSin = _IQsinPU(AngleSin_Cos.IQAngle);
AngleSin_Cos.IQCos = _IQcosPU(AngleSin_Cos.IQAngle);
/**************Clark变换****************/
ClarkI.As = AdcValue.PhaseUCurr;
ClarkI.Bs = AdcValue.PhaseVCurr;
CLARK_MARCO(ClarkI);//clark变换
/**************Park变换****************/
ParkI.Alpha = ClarkI.Alpha;
ParkI.Beta = ClarkI.Beta;
ParkI.Sine = AngleSin_Cos.IQSin;
ParkI.Cosine = AngleSin_Cos.IQCos;
PARK_MARCO(ParkI);//Park变换
/************d轴控制器*******************/
pi_id.Ref = 0; //给定id
pi_id.Fbk = ParkI.Ds; //反馈id
PI_MACRO(pi_id);// d轴控制器
/************q轴控制器*******************/
pi_iq.Fbk = ParkI.Qs; //反馈iq
PI_MACRO(pi_iq);// q轴控制器
/************PARK逆变换*******************/
IparkU.Ds = pi_id.Out;
IparkU.Qs = pi_iq.Out;
IparkU.Sine = AngleSin_Cos.IQSin;//查表得到正弦值
IparkU.Cosine=AngleSin_Cos.IQCos;//查表得到余弦值
PARKinv_MARCO(IparkU)
Svpwm.Ualpha = IparkU.Alpha;
Svpwm.Ubeta = IparkU.Beta;
SMO_Angle(ClarkI.Alpha,ClarkI.Beta,IparkU.Alpha,IparkU.Beta); //滑膜估算角度
SVPWM_Gen(&Svpwm); //得到占空比
PWM_CMP(); //得到PWM比较值
}SMOloop
void SMO_SpeedLoop(void)
{
PWMZD_count++;
if(PWMZD_count==25)
{
PWMZD_count=0;
SMO_Speedcale();
pi_spd.Ref = SpeedRef;
pi_spd.Fbk = Speed_estPare.Speed_RPM;
PI_SPEED_MACRO(pi_spd);//速度环PI
}
AngleSin_Cos.IQAngle = IQAtan_Pare.IQAngle;//估算角度
pi_iq.Ref = pi_spd.Out; //速度输出
ADC_Sample();//采集电流 得到UV电流
AngleSin_Cos.IQSin = _IQsinPU(AngleSin_Cos.IQAngle);
AngleSin_Cos.IQCos = _IQcosPU(AngleSin_Cos.IQAngle);
/**************Clark变换****************/
ClarkI.As = AdcValue.PhaseUCurr;
ClarkI.Bs = AdcValue.PhaseVCurr;
CLARK_MARCO(ClarkI);//clark变换
/**************Park变换****************/
ParkI.Alpha = ClarkI.Alpha;
ParkI.Beta = ClarkI.Beta;
ParkI.Sine = AngleSin_Cos.IQSin;
ParkI.Cosine = AngleSin_Cos.IQCos;
PARK_MARCO(ParkI);//Park变换
/************d轴控制器*******************/
pi_id.Ref = 0; //给定id
pi_id.Fbk = ParkI.Ds; //反馈id
PI_MACRO(pi_id);// d轴控制器
/************q轴控制器*******************/
pi_iq.Fbk = ParkI.Qs; //反馈iq
PI_MACRO(pi_iq);// q轴控制器
/************PARK逆变换*******************/
IparkU.Ds = pi_id.Out;
IparkU.Qs = pi_iq.Out;
IparkU.Sine = AngleSin_Cos.IQSin;//查表得到正弦值
IparkU.Cosine=AngleSin_Cos.IQCos;//查表得到余弦值
PARKinv_MARCO(IparkU)
Svpwm.Ualpha = IparkU.Alpha;
Svpwm.Ubeta = IparkU.Beta;
SMO_Angle(ClarkI.Alpha,ClarkI.Beta,IparkU.Alpha,IparkU.Beta); //滑膜估算角度
SVPWM_Gen(&Svpwm); //得到占空比
PWM_CMP(); //得到PWM比较值
}Hallloop
void Mode_Hall_loop(void)
{
PWMZD_count++;
if(PWMZD_count==25)
{
PWMZD_count=0;
Hall_Three_Speedcale();
pi_spd.Ref = SpeedRef;
pi_spd.Fbk = Hall_Three.Speed_RPM;
PI_SPEED_MACRO(pi_spd);//速度PI控制器
}
ThreeHallanglecale();//得到角度
AngleSin_Cos.IQAngle = Hall_Three.ele_angleIQ;
ADC_Sample();//采集电流 得到UV电流
AngleSin_Cos.IQSin = _IQsinPU(AngleSin_Cos.IQAngle);
AngleSin_Cos.IQCos = _IQcosPU(AngleSin_Cos.IQAngle);
/*****************************************************************************/
/**************Clark变换****************/
ClarkI.As = AdcValue.PhaseUCurr;
ClarkI.Bs = AdcValue.PhaseVCurr;
CLARK_MARCO(ClarkI);//clark变换
/**************Park变换****************/
ParkI.Alpha = ClarkI.Alpha;
ParkI.Beta = ClarkI.Beta;
ParkI.Sine = AngleSin_Cos.IQSin;
ParkI.Cosine = AngleSin_Cos.IQCos;
PARK_MARCO(ParkI);//Park变换
/************d轴控制器*******************/
pi_id.Ref = 0; //给定id
pi_id.Fbk = ParkI.Ds; //反馈id
PI_MACRO(pi_id);// d轴控制器
/************q轴控制器*******************/
pi_iq.Ref = pi_spd.Out; //速度输出
pi_iq.Fbk = ParkI.Qs; //反馈iq
PI_MACRO(pi_iq);// q轴控制器
/************PARK逆变换*******************/
IparkU.Ds = pi_id.Out;
IparkU.Qs = pi_iq.Out;
IparkU.Sine = AngleSin_Cos.IQSin;//查表得到正弦值
IparkU.Cosine=AngleSin_Cos.IQCos;//查表得到余弦值
PARKinv_MARCO(IparkU)
Svpwm.Ualpha = IparkU.Alpha;
Svpwm.Ubeta = IparkU.Beta;
SMO_Angle(ClarkI.Alpha,ClarkI.Beta,IparkU.Alpha,IparkU.Beta); //滑膜估算角度
SVPWM_Gen(&Svpwm); //得到占空比
PWM_CMP(); //得到PWM比较值
}
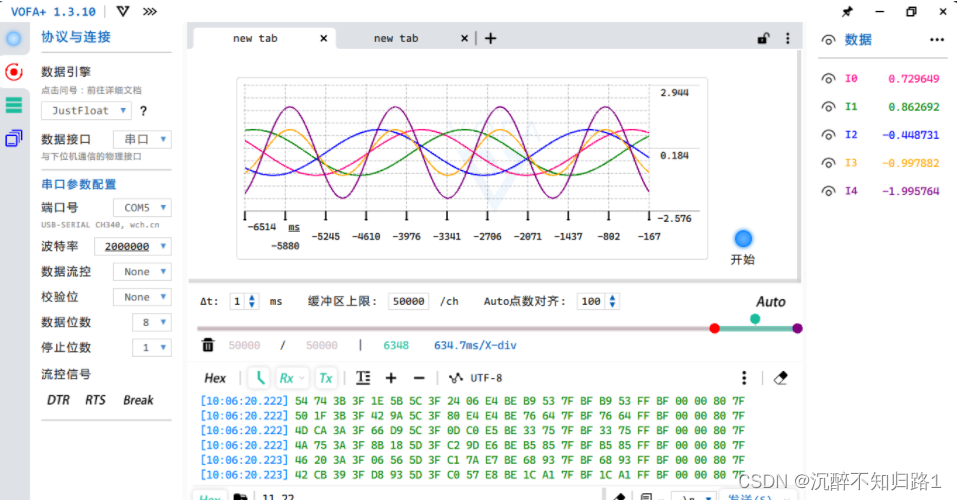
增加了一个上位机接口,用于观测电流波形Iabc,SMO和speed。上位机用的是VOFA,一个开源的上位机。
这是Iabc的波形。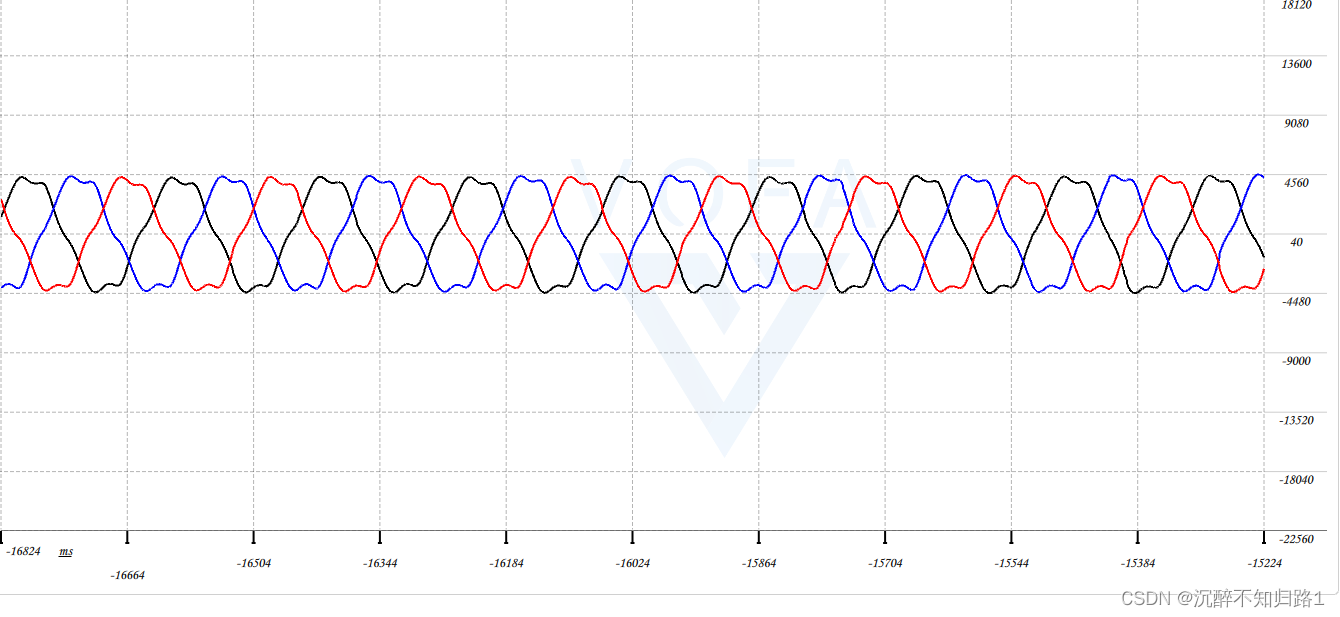
这是SMO波形 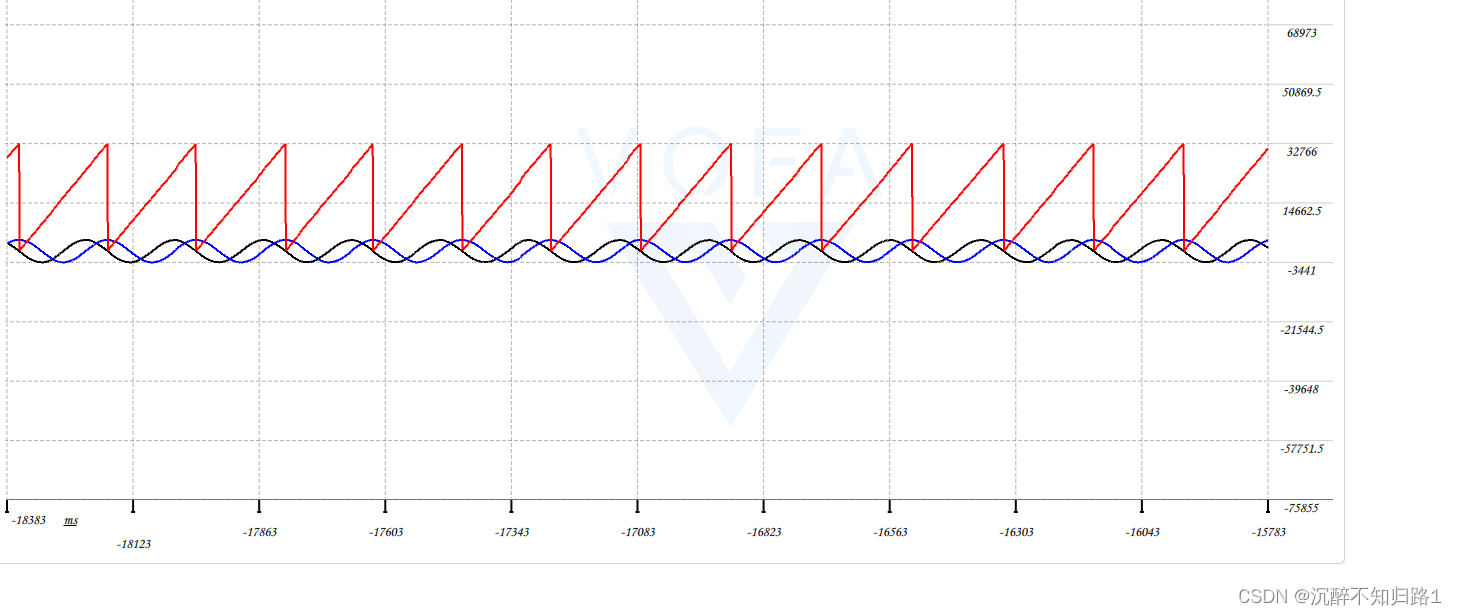
这是 速度speed波形
整体测试还算好吧,后续还有很多工作需要做。最后是测试视频

















 1592
1592

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









