







前言
一年多前就画好了FOC的板子,后面因为各种原因耽搁了,最近又重新捡起来,准备写一下程序,首先我们要做一下FOC的理论分析。
左右手定则
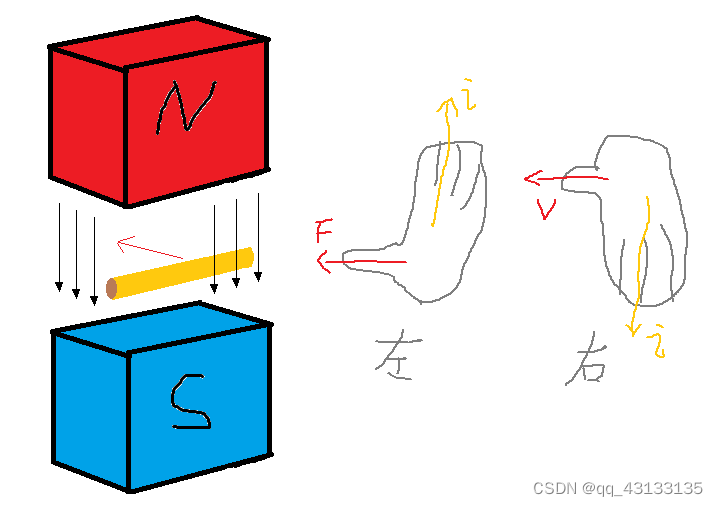
左手定则用于判断导线在磁场中受力的方向:
磁感线从左手手心流入,四指指向电流方向,大拇指指向的就是安培力方向(即导体受力方向)。
右手定则用于判断感生电动势的方向:
磁感线垂直穿入右手手心,大拇指指向导体运动方向,则其余四指指向感生电动势的方向
根据上面的图示,我们能看到,对导体加载正方向电流,其产生向右的力,然后向右运动,在运动过程中又会产生负方向的感应电动势
所以,我们拿到三相电机:
用手旋转它(反向),会产生如下的波形
我们如果将上述波形的交流电输入电机,则会产生正向的旋转运动
SVPWM技术
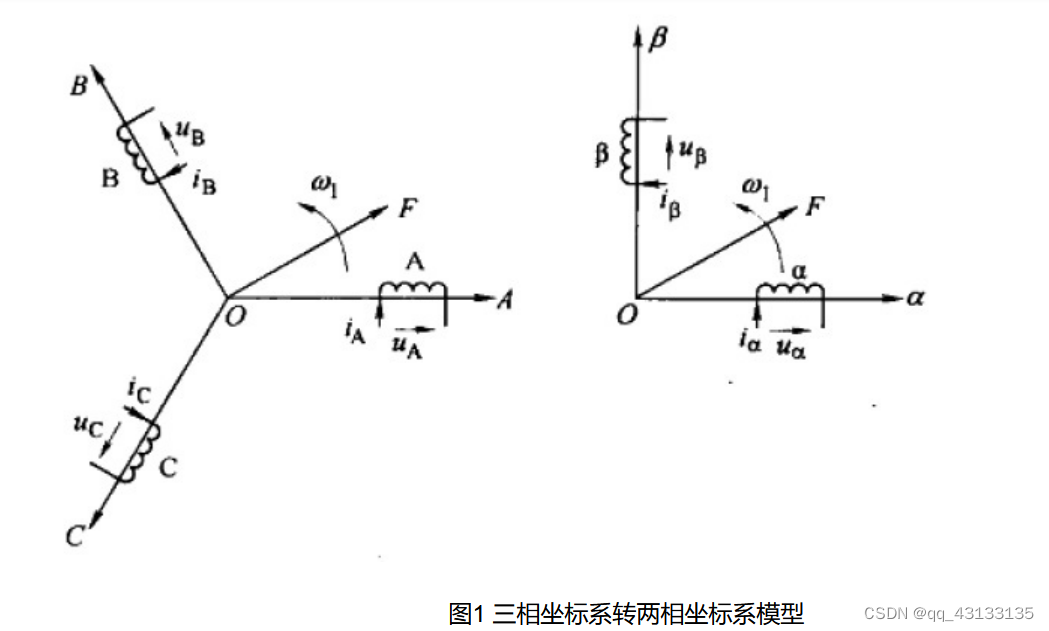
当三相绕组和两相绕组产生的旋转磁动势大小和转速都相等时,我们认为两相绕组与三相绕组等效,这就是Clark变换由来。
三相电压空间矢量相加的合成空间矢量 U t U_t Ut(即投影在A轴之和)就可以表示为:
U t = U A + U B × c o s ( 2 π / 3 ) + U C × c o s ( − 2 π / 3 ) = U A − 0.5 × U B − 0.5 × U C U_t = U_A+U_B×cos(2π/3)+U_C×cos(-2π/3) =U_A -0.5×U_B -0.5×U_C Ut=UA+UB×cos(2π/3)+UC×cos(−2π/3)=UA−0.5×UB−0.5×UC
由三相电规律有:
U A = U m × c o s ( θ t ) U_A = Um×cos(θ_t) UA=Um×cos(θt)
U B = U m × c o s ( θ t − 2 π / 3 ) U_B = Um×cos(θ_t-2π/3) UB=Um×cos(θt−2π/3)
U C = U m × c o s ( θ t + 2 π / 3 ) U_C = Um×cos(θ_t+2π/3) UC=Um×cos(θt+2π/3)
其中 θ t = 2 π ƒ t θ_t = 2πƒt θt=2πƒt,三角化简公式 c o s ( θ − 2 π / 3 ) = c o s ( θ ) c o s ( − 2 π / 3 ) + s i n ( θ ) s i n ( − 2 π / 3 ) = − 0.5 × c o s ( θ ) − 3 2 s i n ( θ ) cos(θ-2π/3)=cos(θ)cos(-2π/3)+sin(θ)sin(-2π/3)=-0.5×cos(θ)-\frac{\sqrt{3}}{2}sin(θ) cos(θ−2π/3)=cos(θ)cos(−2π/3)+sin(θ)sin(−2π/3)=−0.5×cos(θ)−23sin(θ)
c o s ( θ + 2 π / 3 ) = − 0.5 × c o s ( θ ) + 3 2 s i n ( θ ) cos(θ+2π/3)=-0.5×cos(θ)+\frac{\sqrt{3}}{2}sin(θ) cos(θ+2π/3)=−0.5×cos(θ)+23sin(θ)则 U t U_t Ut为:
U t = U A − 0.5 × U B − 0.5 × U C = U m × ( c o s ( θ t ) − 0.5 × ( − 0.5 × c o s ( θ t ) − 3 2 s i n ( θ ) ) − 0.5 × ( − 0.5 × c o s ( θ t ) + 3 2 s i n ( θ ) s i n ( θ t ) ) ) = U m × ( c o s ( θ t ) + 0.5 × c o s ( θ t ) ) = U m × 3 2 c o s ( θ t ) U_t = U_A -0.5×U_B -0.5×U_C = Um×(cos(θ_t)-0.5×(-0.5×cos(θ_t)-\frac{\sqrt{3}}{2}sin(θ)) -0.5×(-0.5×cos(θ_t)+\frac{\sqrt{3}}{2}sin(θ)sin(θ_t)) )=Um×(cos(θ_t) + 0.5×cos(θ_t))=Um× \frac{3}{2}cos(θ_t) Ut=UA−0.5×UB−0.5×UC=Um×(cos(θt)−0.5×(−0.5×cos(θt)−23sin(θ))−0.5×(−0.5×cos(θt)+23sin(θ)sin(θt)))=Um×(cos(θt)+0.5×cos(θt))=Um×23cos(θt)
可得 U t U_t Ut峰值为1.5倍的Um
更详细请参考SVPWM实现概述
基于STM32实现SVPWM调制算法
三相电
我们对于三相电的
t
0
t_0
t0时刻状态,可以表示如下:
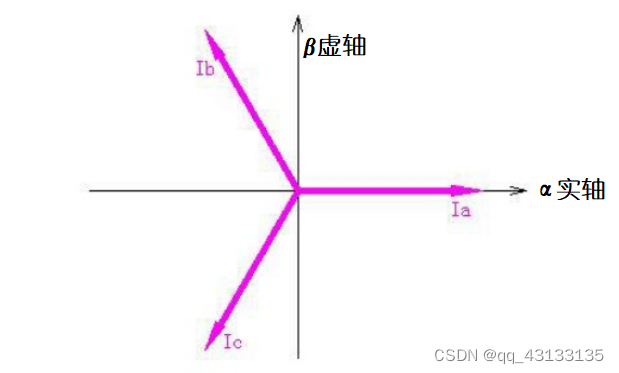
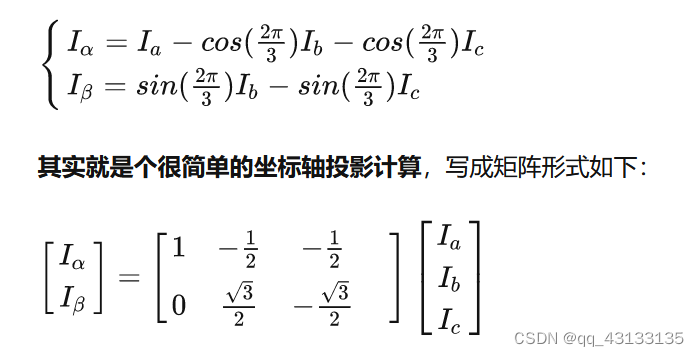
其中实轴就是当前的实际输出值,虚轴是假想轴,这样我们就可以将其变换到两个轴上了(即所谓的Clark变换):
然后,我们根据基尔霍夫定律有 Ic = -(Ia+ Ib)
对上式化简可得
I α = I a I_{\alpha} = I_a Iα=Ia
I β = I a I_{\beta} = I_a Iβ=Ia
在 t 1 t_1 t1时刻,假设 I a , I b , I c I_a,I_b,I_c Ia,Ib,Ic同时顺时针旋转了 θ \theta θ度,由于相对的相位不变,在进行Clark变换后即相当于 I α , I β I_{\alpha},I_{\beta} Iα,Iβ顺时针旋转了 θ \theta θ度。我们就可以直接得到 t 1 t_1 t1时刻的 I α , I β I_{\alpha},I_{\beta} Iα,Iβ值(即分别为 I d , I q I_d,I_q Id,Iq,这个变换即所谓的Park变换):
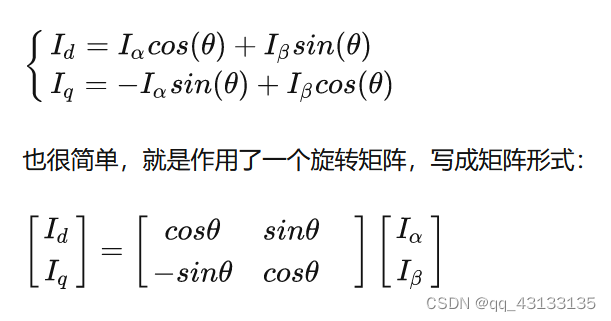
Park变换是顺时针旋转,则RevPark变换就是逆时针旋转,他俩刚好互为逆变换
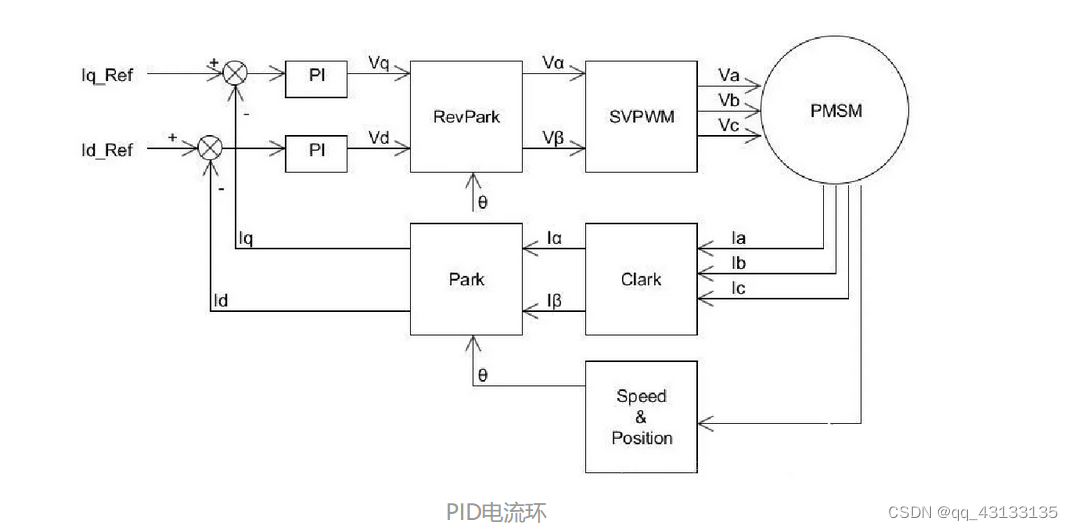
参数控制
 上图中,
I
d
_
R
e
f
,
I
q
_
R
e
f
I_d\_Ref,I_q\_Ref
Id_Ref,Iq_Ref即是我们的目标,通过前面分析,我们知道
I
d
I_d
Id轴实际上是实轴,而
I
q
I_q
Iq轴即虚轴。我们希望
I
q
I_q
Iq是0,而
I
d
I_d
Id是实际力矩输出
上图中,
I
d
_
R
e
f
,
I
q
_
R
e
f
I_d\_Ref,I_q\_Ref
Id_Ref,Iq_Ref即是我们的目标,通过前面分析,我们知道
I
d
I_d
Id轴实际上是实轴,而
I
q
I_q
Iq轴即虚轴。我们希望
I
q
I_q
Iq是0,而
I
d
I_d
Id是实际力矩输出
。
参考
ST电机库v5.4.4源代码分析(1): FOC原理(结合ST电机库)
【自制FOC驱动器】深入浅出讲解FOC算法与SVPWM技术
需要注意的是稚晖君的控制是使用 I q I_q Iq控制,而不是 I d I_d Id,但实际上三相电中更常用的 I d I_d Id控制,这更符和其实际意义,使用 I q I_q Iq的话,实际上是虚轴和实轴刚好假设反了。















 614
614











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









