






如何从初始通用形状的mesh 变形到目标mesh
学习目标:
How to load a mesh from an .obj file
How to use the PyTorch3D Meshes datastructure
How to use 4 different PyTorch3D mesh loss functions
How to set up an optimization loop
1. Load an obj file and create a Meshes object
3D模型的文件格式是.obj。 用下面的语句加载obj文件。
verts, faces, aux = load_obj(trg_obj)# verts is a FloatTensor of shape (V, 3) where V is the number of vertices in the mesh
# faces is an object which contains the following LongTensors: verts_idx, normals_idx and textures_idx
faces_idx = faces.verts_idx.to(device)
verts = verts.to(device)接着标准化(由于我们的目标网格是位于原点、半径为1的球形mesh,因此可以将目标mesh也移动到远点,缩放到大小类似与半径为1的球体)
# We scale normalize and center the target mesh to fit in a sphere of radius 1 centered at (0,0,0).
# (scale, center) will be used to bring the predicted mesh to its original center and scale
# Note that normalizing the target mesh, speeds up the optimization but is not necessary!
center = verts.mean(0)
verts = verts - center
scale = max(verts.abs().max(0)[0])
verts = verts / scale为目标mesh 创建一个Mesh结构
trg_mesh = Meshes(verts=[verts], faces=[faces_idx])至此目标mesh就成功导入并创建Mesh对象了。接着初始化通用球形网格。
src_mesh = ico_sphere(4, device)Visualize the source and target meshes
def plot_pointcloud(mesh, title=""):
# Sample points uniformly from the surface of the mesh.
points = sample_points_from_meshes(mesh, 5000)
x, y, z = points.clone().detach().cpu().squeeze().unbind(1)
fig = plt.figure(figsize=(5, 5))
ax = Axes3D(fig)
ax.scatter3D(x, z, -y)
ax.set_xlabel('x')
ax.set_ylabel('z')
ax.set_zlabel('y')
ax.set_title(title)
ax.view_init(190, 30)
plt.show()# %matplotlib notebook
plot_pointcloud(trg_mesh, "Target mesh")
plot_pointcloud(src_mesh, "Source mesh")2. Optimization loop
利用loss 将source mesh 变换到目标mesh,source mesh 通常可以是一个球面网格。
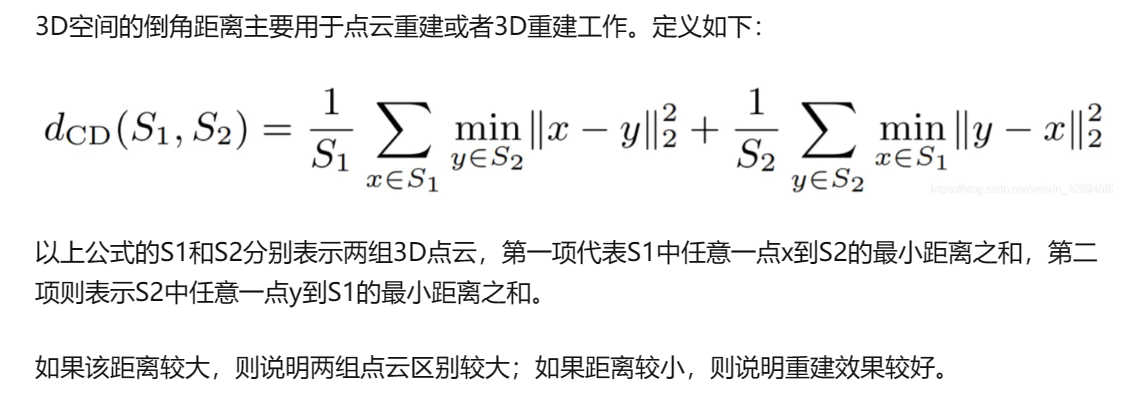
从球面网格开始,我们学习网格中每个顶点的偏移量,以便在每个优化步骤中预测的网格更接近目标网格。为了实现这一目标,我们最小化:chamfer_distance(表示预测网格与目标网格之间的距离,定义为点云集合之间的倒角距离,这些点云集合是从它们的表面可微采样点产生的。)
但是仅仅最小化倒角距离将会导致非光滑的形状,因此需要添加形状正则化项来加强平滑性。也就是说,我们添加:
Mesh _ edge _ length,来限制预测网格中的边长不要过于长。
mesh_normal_consistency它强化了相邻面的法线的一致性。
mesh_laplacian_smoothing是拉普拉斯正则化器。
下面是一个标准的优化过程的代码示例。
# We will learn to deform the source mesh by offsetting its vertices
# The shape of the deform parameters is equal to the total number of vertices in src_mesh
deform_verts = torch.full(src_mesh.verts_packed().shape, 0.0, device=device, requires_grad=True)
# The optimizer
optimizer = torch.optim.SGD([deform_verts], lr=1.0, momentum=0.9)
# Number of optimization steps
Niter = 2000
# Weight for the chamfer loss
w_chamfer = 1.0
# Weight for mesh edge loss
w_edge = 1.0
# Weight for mesh normal consistency
w_normal = 0.01
# Weight for mesh laplacian smoothing
w_laplacian = 0.1
# Plot period for the losses
plot_period = 250
loop = tqdm(range(Niter))
chamfer_losses = []
laplacian_losses = []
edge_losses = []
normal_losses = []
%matplotlib inline
for i in loop:
# Initialize optimizer
optimizer.zero_grad()
# Deform the mesh
new_src_mesh = src_mesh.offset_verts(deform_verts)
# We sample 5k points from the surface of each mesh
sample_trg = sample_points_from_meshes(trg_mesh, 5000)
sample_src = sample_points_from_meshes(new_src_mesh, 5000)
# We compare the two sets of pointclouds by computing (a) the chamfer loss
loss_chamfer, _ = chamfer_distance(sample_trg, sample_src)
# and (b) the edge length of the predicted mesh
loss_edge = mesh_edge_loss(new_src_mesh)
# mesh normal consistency
loss_normal = mesh_normal_consistency(new_src_mesh)
# mesh laplacian smoothing
loss_laplacian = mesh_laplacian_smoothing(new_src_mesh, method="uniform")
# Weighted sum of the losses
loss = loss_chamfer * w_chamfer + loss_edge * w_edge + loss_normal * w_normal + loss_laplacian * w_laplacian
# Print the losses
loop.set_description('total_loss = %.6f' % loss)
# Save the losses for plotting
chamfer_losses.append(float(loss_chamfer.detach().cpu()))
edge_losses.append(float(loss_edge.detach().cpu()))
normal_losses.append(float(loss_normal.detach().cpu()))
laplacian_losses.append(float(loss_laplacian.detach().cpu()))
# Plot mesh
if i % plot_period == 0:
plot_pointcloud(new_src_mesh, title="iter: %d" % i)
# Optimization step
loss.backward()
optimizer.step()3. Visualize the loss
fig = plt.figure(figsize=(13, 5))
ax = fig.gca()
ax.plot(chamfer_losses, label="chamfer loss")
ax.plot(edge_losses, label="edge loss")
ax.plot(normal_losses, label="normal loss")
ax.plot(laplacian_losses, label="laplacian loss")
ax.legend(fontsize="16")
ax.set_xlabel("Iteration", fontsize="16")
ax.set_ylabel("Loss", fontsize="16")
ax.set_title("Loss vs iterations", fontsize="16");4. Save the predicted mesh
# Fetch the verts and faces of the final predicted mesh
final_verts, final_faces = new_src_mesh.get_mesh_verts_faces(0)
# Scale normalize back to the original target size
final_verts = final_verts * scale + center
# Store the predicted mesh using save_obj
final_obj = os.path.join('./', 'final_model.obj')
save_obj(final_obj, final_verts, final_faces)














 1385
1385











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









