







本专栏参考崔华坤的《VINS论文推导及代码解析》的PDF,按照这个框架,对VINS-Mono的原理进行详解,并附加代码解析~
总体内容如下:
VINS-Mono原理推导与代码解析(五)初始化
VINS-Mono原理推导与代码解析(六)边缘化Maginalization和FEJ
VINS-Mono原理推导与代码解析(七)闭环检测与优化
VINS-Mono原理推导与代码解析(八)其他补充~
先认识一下重要的变量~
- prev_img:上一次发布的帧的图像数据
- cur_img:光流跟踪的前一帧的图像数据
- forw_img:光流跟踪的后一帧的图像数据
先来看看PDF中对前端视觉处理的讲解。
特征点检测
Frame 1: goodFeaturesToTrack 检测MAX_CNT个特征点,设置forw_pts如下:
| ids | forw_pts | track_cnt |
| 4 | [600,400] | 1 |
| 3 | [500,300] | 1 |
| 2 | [400,200] | 1 |
| 1 | [300,100] | 1 |
| 0 | [100,50] | 1 |
特征点跟踪
Frame 2: calcOpticalFlowPyrLK 跟踪,将跟踪失败的点删除,跟踪成功的点点跟踪计数+1,并调用 goodFeaturesToTrack 检测出MAX_CNT - forw_pts.size()个特征点,并添加到forw_pts中,并调用updateID 更新ids,最后得到的forw_pts如下:
| ids | forw_pts | track_cnt |
| 6 | [200,150] | 1 |
| 5 | [100,100] | 1 |
| 4 | [580,400] | 2 |
| 1 | [280,100] | 2 |
| 0 | [700,50] | 2 |
然后来看看代码。按照下面的流程图,来理通代码思路。
流程图来源:VINS-Mono代码解读——视觉跟踪 feature_trackers_rejectwithf-CSDN博客
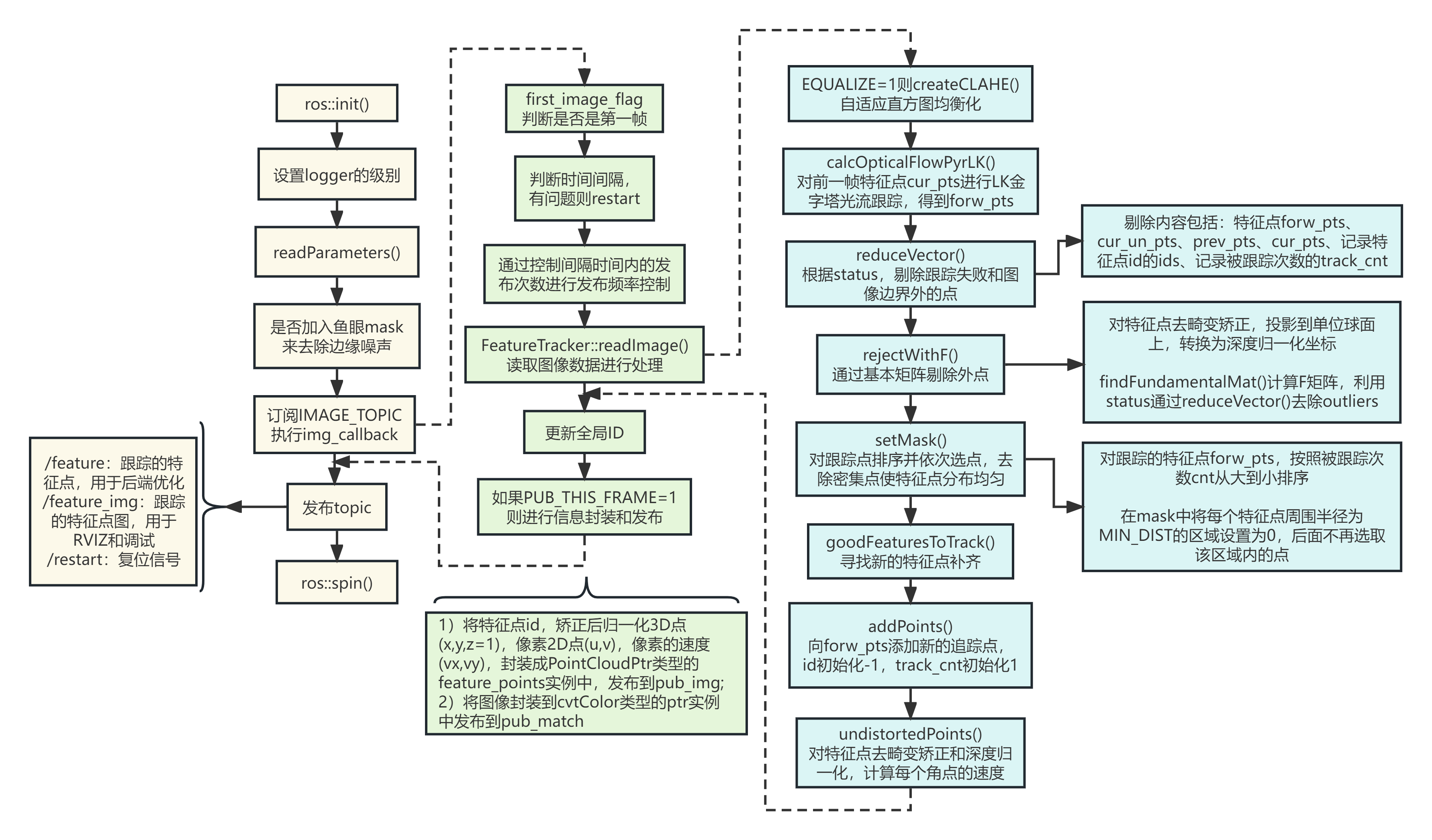
1. main()函数
该部分对应流程图黄色那一列~ 步骤已在代码中注释出来了。
int main(int argc, char **argv)
{
// 1.ros::init()
ros::init(argc, argv, "feature_tracker");
ros::NodeHandle n("~");
// 2.设置logger的级别
ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Info);
// 3. readParameters()读取参数
readParameters(n);
for(int i=0; i<NUM_OF_CAM; i++)
trackerData[i].readIntrinsicParameter(CAM_NAMES[i]);
// 4.判断是否加入鱼眼mask来去除边缘噪声
if(FISHEYE)
{
for(int i=0; i<NUM_OF_CAM; i++)
{
trackerData[i].fisheye_mask = cv::imread(FISHEYE_MASK, 0);
if(!trackData[i].fisheye_mask.data)
{
ROS_INFO("load mask fail");
ROS_BREAK();
}
else
ROS_INFO("loas mask success");
}
}
// 5.订阅IMAGE_TOPIC执行img_callback
ros::Subscriber sub_img = n.subscribe(IMAGE_TOPIC, 100, img_callback);
// 6. 发布的三个topics
pub_img = n.advertise<sensor_msgs::PointCloud>("feature", 1000);
pub_match = n.advertise<sensor_msgs::Image>("feature_img", 1000);
pub_restart = n.advertise<std_msgs::Bool>("restart", 1000);
// 7. ros::spin()
ros::spin();
return 0;
}2.IMAGE_TOPIC执行img_callback
这一部分对应流程图中的绿色部分~ 执行图像订阅的回调函数
void img_callback(const sensor_msgs::ImageConstPtr &img_msg)
{
// 1. 判断是否是第1帧
if(first_image_flag)
{
first_image_flag = false;
first_image_time = img_msg->header.stamp.toSec();
last_image_time = img_msg->header.stamp.toSec();
return;
}
// 2. 判断时间间隔,有问题则restart
if(img_msg->header.stamp.toSec() - last_image_time > 1.0 || img_msg->header.stamp.toSec() < last_image_time)
{
ROS_WARN("image discontinue! reset the feature tracker!");
first_image_flag = true;
last_image_time = 0;
pub_count = 1;
std::msgs::Bool restart_flag;
restart_flag.data = true;
pub_restart.publish(restart_flag);
return;
}
last_image_time = img_msg->header.stamp.toSec();
// 3. 通过控制间隔时间内的发布次数进行发布频率控制
if(round(1.0 * pub_count) / (img_msg->header.stamp.toSec() - first_image_time)) <= FREQ)
{
PUB_THIS_FRAME = true;
if(abs(1.0 *pub_count / (img_msg->header.stamp.toSec() - first_image_time) - FREQ) < 0.01 * FREQ)
{
first_image_time = img_msg->header.stamp.toSec();
pub_count = 0;
}
}
else
PUB_THIS_FRAME = false;
// 4. FeatureTracker::readImage()
....
// 这部分放到下一节讲解~
// 5. 更新全局ID
for(unsigned int i=0; ; i++)
{
bool completed = false;
for(int j=0; j<NUM_OF_CAM; j++)
if(j!=1 || !STEREO_TRACK)
completed |= trackerData[j].updateID(i);
if(!completed)
break;
}
// 6. 如果PUB_THIS_FRAMR=1,则进行信息封装与发布
if(PUB_THIS_FRAME)
{
pub_count++;
// 6.1 将特征点id,矫正后归一化3D点,像素2D点,像素速度,封装成PointCloudPtr类型的feature_points实例中,发布到pub_img
sensor_msgs::PointCloudPtr feature_points(new sensor_msgs::PointCloud);
sensor_msgs::ChannelFloat32 id_of_point; // 特征点id
sensor_msgs::ChannelFloat32 u_of_point; // 像素2D点
sensor_msgs::ChannelFloat32 v_of_point;
sensor_msgs::ChannelFloat32 velocity_x_of_point; // 像素速度
sensor_msgs::ChannelFloat32 velocity_y_of_point;
feature_points->header = img_msg->header;
feature_points->header.frame_id = "world";
vector<set<int>> hash_ids(NUM_OF_CAM);
for(int i=0; i<NUM_OF_CAM; i++)
{
auto &un_pts = trackerData[i].cur_un_pts;
auto &cur_pts = trackerData[i].cur_pts;
auto &id = trackerData[i].ids;
auto &pts_velocity = trackerData[i].pts_velocity;
for(unsigned int j=0; j<ids.size(); j++)
{
if(trackerData[i].track_cnt[j] > 1)
{
int p_id = ids[j];
hash_ids[i].insert(p_id);
geometry_msgs::Point32 p;
p.x = un_pts[j].x; // 归一化的3D点
p.y = un_pts[j].y;
p.z = 1;
feature_points->points.push_back(p);
id_of_point.values.push_back(p_id * NUM_OF_CAM + i);
u_of_point.values.push_back(cur_pts[j].x);
v_of_point.values.push_back(cur_pts[j].y);
velocity_x_of_point.values.push_back(pts_velocity[j].x);
velocity_y_of_point.values.push_back(pts_velocity[j].y);
}
}
}
feature_points->channels.push_back(id_of_point);
feature_points->channels.push_back(u_of_point);
feature_points->channels.push_back(v_of_point);
feature_points->channels.push_back(velocity_x_of_point);
feature_points->channels.push_back(velocity_y_of_point);
if(!init_pub)
init_pub = 1;
else
pub_img.publish(feature_points);
// 6.2 将图像封装到cvtColor类型的ptr实例中发布到pub_match
if(SHOW_TRACK)
{
ptr = cv_bridge::cvtColor(ptr, sensor_msgs::image_encoding::BGR8);
cv::Mat stereo_img = ptr->image;
for(int i=0; i<NUM_OF_CAM; i++)
{
cv::Mat tmp_img = stereo_img.rowRange(i*ROW, (i+1)*ROW);
cv::cvtColor(show_img, tmp_img, CV_GRAY2RGB);
for(unsigned int j=0; j<trackerData[i].cur_pts.size(); j++)
{
double len = std::min(1.0, 1.0 * trackerData[i].track_cnt[j] / WINDOW_SIZE);
cv::circle(tmp_img, trackerData[i].cur_pts[j], 2, cv::Scalar(255*(1-len), 0, 255*len), 2);
}
}
pub_match.publish(ptr->toImageMsg);
}
}
}3.FeatureTracker::readImage()
这一部分对应流程图中的蓝色部分~读取图像数据进行处理
void FeatureTracker::readImage(const cv::Mat &_img, double _cur_time)
{
cv::Mat img;
TicToc t_r;
cur_time = _cur_time;
// 1. EQUALIZE=1则createCLAHE()自适应直方图均衡化
if(EQUALIZE)
{
cv::Ptr<cv::CLAHE> clahe = cv::createCLAHE(3.0, cv::Size(8, 8));
TicToc t_c;
clahe->apply(_img, img);
ROS_DEBUG("CLAHE costs: %fms", t_c.toc());
}
else
img = _img;
// 图像帧更新
if(forw_img.empty())
prev_img = cur_img = forw_img = img;
else
forw_img = img;
forw_pts.clear();
// 2. calcOpticalFlowPyrLK()对前一帧特征点cur_pts进行LK金字塔光流跟踪,得到forw_pts
if(cur_pts.size()>0)
{
TicToc t_o;
vector<uchar> status;
vector<float> err;
cv::calcOpticalFlowPyrLK(cur_img, forw_img, cur_pts, forw_pts, status, err, cv::Size(21, 21), 3);
// 3. reduceVector()根据status,提出跟踪失败和图像边界的点
for(int i=0; i<int(forw_pts.size()); i++)
if(status[i] && !inBorder(forw_pts[i]))
status[i] = 0;
reduceVector(prev_pts, status); // 特征点prev_pts
reduceVector(cur_pts, status); // 特征点cur_pts
reduceVector(forw_pts, status); // 特征点forw_pts
reduceVector(ids, status); // 记录特征点id的ids
reduceVector(cur_un_pts, status); // 特征点cur_un_pts
reduceVector(track_cnt, status); // 记录被跟踪次数的track_cnt
}
for(auto &n : track_cnt)
n++;
if(PUB_THIS_FRAME)
{
// 4. rejectWithF()通过基本矩阵剔除外点
rejectWithF();
// 5. setMask()对跟踪点排序并依次选点,去除密集点使特征点分布均匀
setMask();
// detect feature begins
// 6. goodFeaturesToTrack()寻找新的特征点补齐
int n_max_cnt = MAX_CNT - static_cast<int>(forw_pts.size());
if(n_max_cnt > 0)
{
cv::goodFeaturesToTrack(forw_img, n_pts, MAX_CNT-forw_pts.size(), 0.01, MIN_DIST, mask);
}
else
n_pts.clear();
// 7. addPoints()向forw_pts添加新的追踪点,id初始化-1,track_cnt初始化1
addPoints();
}
prev_img = cur_img;
prev_pts = cur_pts;
prev_un_pts = cur_un_pts;
cur_img = forw_img;
cur_pts = forw_pts;
// 8. undistortedPoints()对特征点去畸变矫正和深度归一化,计算每个角点的深度
undistortedPoints();
prev_time = cur_time;
}然后看看FeatureTracker::readImage()中涉及到的函数,见下表。
| 函数 | 功能 |
| bool inBorder() | 判断跟踪的特征点是否在图像边界内 |
| void reduceVector() | 去除无法跟踪的特征点 |
| void FeatureTracker::setMask() | 对跟踪点进行排序并去除密集点 |
| void FeatureTracker::addPoints() | 添加新检测到的特征点n_pts,ID初始化-1,跟踪次数1 |
| void FeatureTracker::rejectWithF() | 通过F矩阵去除outliers |
| bool FetaureTracker::updateID() | 更新特征点id |
| void FeatureTracker::readIntrinsicParameter() | 读取相机内参 |
| void FeatureTracker::showUndistortion() | 显示去畸变矫正后的特征点 |
| void FeatureTracker::undistortedPoints() | 对特征点的图像坐标去畸变矫正,并计算每个角点的速度 |
3.1 createCLAHE()
使用的是opencv提供的函数
cv::createCLAHE(3.0, cv::Size(8, 8));3.2 calcOpticalFlowPyrLK()
使用的也是opencv提供的函数
cv::calcOpticalFlowPyrLK(cur_img, forw_img, cur_pts, forw_pts, status, err, cv::Size(21,21), 3);3.3 reduceVector()
void reduceVector(vector<cv::Point2f> &v, vector<uchar> status)
{
int j=0;
for(int i=0; i<int(v.size()); i++)
if(status[i])
v[j++]=v[i];
v.resize(j);
}
void reduceVector(vector<int> &v, vector<uchar> status)
{
int j=0;
for(int i=0; i<int(v.size()); i++)
if(status[i])
v[j++] = v[i];
v.resize(j);
}3.4 rejectWithF()
void FeatureTracker::rejectWithF()
{
if (forw_pts.size() >= 8)
{
ROS_DEBUG("FM ransac begins");
TicToc t_f;
vector<cv::Point2f> un_cur_pts(cur_pts.size()), un_forw_pts(forw_pts.size());
for (unsigned int i = 0; i < cur_pts.size(); i++)
{
Eigen::Vector3d tmp_p;
m_camera->liftProjective(Eigen::Vector2d(cur_pts[i].x, cur_pts[i].y), tmp_p);
tmp_p.x() = FOCAL_LENGTH * tmp_p.x() / tmp_p.z() + COL / 2.0;
tmp_p.y() = FOCAL_LENGTH * tmp_p.y() / tmp_p.z() + ROW / 2.0;
un_cur_pts[i] = cv::Point2f(tmp_p.x(), tmp_p.y());
m_camera->liftProjective(Eigen::Vector2d(forw_pts[i].x, forw_pts[i].y), tmp_p);
tmp_p.x() = FOCAL_LENGTH * tmp_p.x() / tmp_p.z() + COL / 2.0;
tmp_p.y() = FOCAL_LENGTH * tmp_p.y() / tmp_p.z() + ROW / 2.0;
un_forw_pts[i] = cv::Point2f(tmp_p.x(), tmp_p.y());
}
vector<uchar> status;
cv::findFundamentalMat(un_cur_pts, un_forw_pts, cv::FM_RANSAC, F_THRESHOLD, 0.99, status);
int size_a = cur_pts.size();
reduceVector(prev_pts, status);
reduceVector(cur_pts, status);
reduceVector(forw_pts, status);
reduceVector(cur_un_pts, status);
reduceVector(ids, status);
reduceVector(track_cnt, status);
ROS_DEBUG("FM ransac: %d -> %lu: %f", size_a, forw_pts.size(), 1.0 * forw_pts.size() / size_a);
ROS_DEBUG("FM ransac costs: %fms", t_f.toc());
}
}3.5 setMask()
void FeatureTracker::setMask()
{
if(FISHEYE)
mask = fisheye_mask.clone();
else
mask = cv::Mat(ROW, COL, CV_8UC1, cv::Scalar(255));
// prefer to keep features that are tracked for long time
vector<pair<int, pair<cv::Point2f, int>>> cnt_pts_id;
for (unsigned int i = 0; i < forw_pts.size(); i++)
cnt_pts_id.push_back(make_pair(track_cnt[i], make_pair(forw_pts[i], ids[i])));
sort(cnt_pts_id.begin(), cnt_pts_id.end(), [](const pair<int, pair<cv::Point2f, int>> &a, const pair<int, pair<cv::Point2f, int>> &b)
{
return a.first > b.first;
});
forw_pts.clear();
ids.clear();
track_cnt.clear();
for (auto &it : cnt_pts_id)
{
if (mask.at<uchar>(it.second.first) == 255)
{
forw_pts.push_back(it.second.first);
ids.push_back(it.second.second);
track_cnt.push_back(it.first);
cv::circle(mask, it.second.first, MIN_DIST, 0, -1);
}
}
}3.6 goodFeaturesToTrack()
这里用的也是opencv提供的函数
cv::goodFeaturesToTrack(forw_img, n_pts, MAX_CNT - forw_pts.size(), 0.01, MIN_DIST, mask);3.7 addPoints()
void FeatureTracker::addPoints()
{
for (auto &p : n_pts)
{
forw_pts.push_back(p);
ids.push_back(-1);
track_cnt.push_back(1);
}
}3.8 undistortedPoints()
void FeatureTracker::undistortedPoints()
{
cur_un_pts.clear();
cur_un_pts_map.clear();
//cv::undistortPoints(cur_pts, un_pts, K, cv::Mat());
for (unsigned int i = 0; i < cur_pts.size(); i++)
{
Eigen::Vector2d a(cur_pts[i].x, cur_pts[i].y);
Eigen::Vector3d b;
m_camera->liftProjective(a, b);
cur_un_pts.push_back(cv::Point2f(b.x() / b.z(), b.y() / b.z()));
cur_un_pts_map.insert(make_pair(ids[i], cv::Point2f(b.x() / b.z(), b.y() / b.z())));
//printf("cur pts id %d %f %f", ids[i], cur_un_pts[i].x, cur_un_pts[i].y);
}
// caculate points velocity
if (!prev_un_pts_map.empty())
{
double dt = cur_time - prev_time;
pts_velocity.clear();
for (unsigned int i = 0; i < cur_un_pts.size(); i++)
{
if (ids[i] != -1)
{
std::map<int, cv::Point2f>::iterator it;
it = prev_un_pts_map.find(ids[i]);
if (it != prev_un_pts_map.end())
{
double v_x = (cur_un_pts[i].x - it->second.x) / dt;
double v_y = (cur_un_pts[i].y - it->second.y) / dt;
pts_velocity.push_back(cv::Point2f(v_x, v_y));
}
else
pts_velocity.push_back(cv::Point2f(0, 0));
}
else
{
pts_velocity.push_back(cv::Point2f(0, 0));
}
}
}
else
{
for (unsigned int i = 0; i < cur_pts.size(); i++)
{
pts_velocity.push_back(cv::Point2f(0, 0));
}
}
prev_un_pts_map = cur_un_pts_map;
}好了,前端特征部分就到这里了~















 2802
2802











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









