






对比 hector 与 gmapping
hector 缺少参照物的变化 会无法匹配地图(雷达点云和地图特征的配准会失效)
而gampping 可以根据自身的运动来匹配地图,
自身运动则涉及到电机中的里程计
odom (odometry)
但实际运动与计算运动通常会有偏差,并且会不断累计,那么如何修正?
答:障碍物点云配准算法
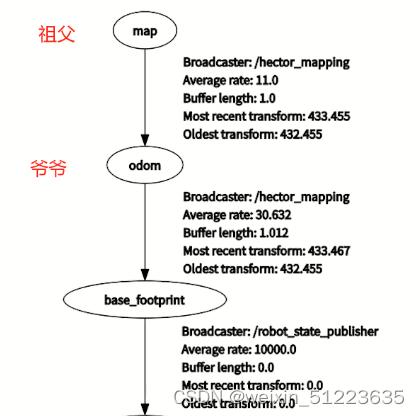
最终输出是 map 到 base_footprint
那么 map 到 odom 则是修正
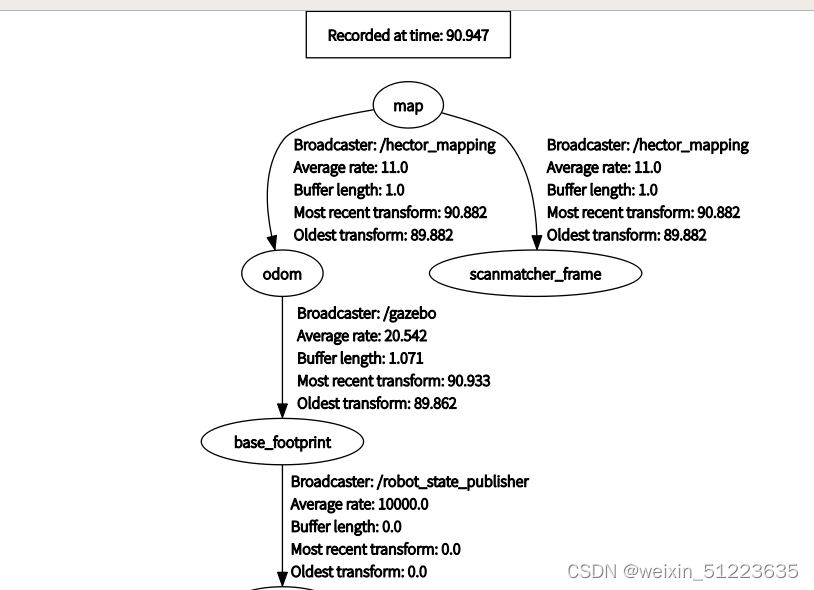
然而 在hector 中查看查 tf_tree 会发现同样也有odem
但其是为了使base_footprint 与 scanmatcher_frame 保持一致















 1006
1006











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









