






什么是IMU?
IMU通常指6轴传感器(陀螺仪+加速度计)或9轴传感器(陀螺仪+加速度计+磁力计)。IMU内部通常是将这几个传感器叠放在一起,保证轴重合。6轴IMU可以获取到测量载体的加速度及角速度,9轴设备能够额外获取载体姿态角(磁力计可以获取到基于东北天或者北东地坐标下的三轴朝向,即姿态信息)。
注:东北天:"东北"指的是东北方向,而"天"在这里通常指的是天空或空中。因此,“东北天”可以理解为指向东北方向的天空。
北东地:“北东”指的是北偏东方向。“地”表示地面或者地表。因此。“北东地”可以解释为位于北偏东方向的地面或与该方向相关的地理特征。
陀螺仪
陀螺仪测量的是X,Y,Z三轴的角速度,对角速度进行积分,累加上一时刻的方位,就可以得到系统当前的方位。测量单位通常为 rad/s 或 deg/s 。
加速度计
(1)测量比力
比力是指去掉重力加速度后的整体加速度或去掉引力后的单位质量上的作用力。
当加速度计保持静止时,加速度计能够清晰感知到重力加速度,而整体加速度为零。即当无人机静止或者悬停时,加速度计的输出为0。
(2)测量角度
MEMS三轴加速度计是采用压阻式,压电式和电容式工作原理,产生的比力分别正比于电阻,电压和电容的变化,这些变化量可以反应出加速度计与地面的角度。角度测量原理以弹簧举例:

可以直观地看出,弹簧的压缩度是由加速度计与地面的角度决定的,故当我们知道力的大小和弹簧形变后可以计算出角度。
通过这个原理我们可以得知,加速度计可以很精确地测量俯仰角和滚转角,且没有累积误差,但无法测量偏航角,同时易受振动影响。
注:
-
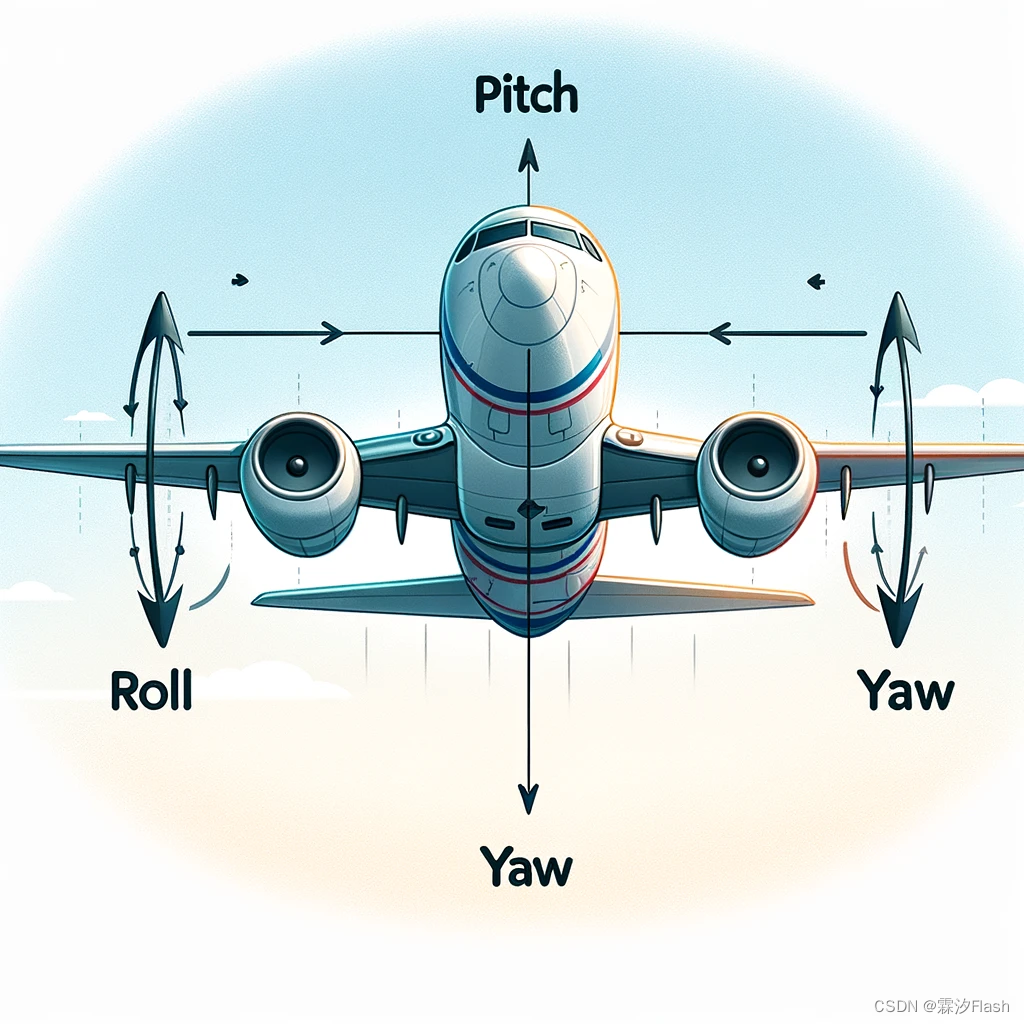
俯仰角(Pitch):俯仰角是指飞行器的鼻部向上或向下移动的角度。即飞行器的鼻部沿着横轴上升或下降。这反映了飞行器在垂直方向上的运动。
-
滚转角(Roll):滚转角是指飞行器沿着其长轴的左右倾斜。即飞行器的一翼向上抬起而另一翼向下移动,展示了沿着飞行器长轴的旋转。
-
偏航角(Yaw):偏航角是指飞行器绕着垂直轴的左右旋转。即飞行器的鼻部向左或向右移动,表示了水平方向上的旋转。
磁力计
磁力计内部是三个互相垂直的磁阻传感器,每个轴上的传感器检测该方向上的磁场强度。
-
测量磁场: 磁力计首先测量周围的磁场强度和方向。地球本身是一个巨大的磁体,其磁场在不同位置有不同的强度和方向。
-
确定方向: 通过测量磁场的方向,磁力计可以确定设备的朝向。通常,磁力计提供的是相对于地球磁北极的方向信息。例如,如果磁力计指向地球的磁北极,那么它指向的就是“北”。
-
计算姿态: 结合加速度计和陀螺仪的数据,可以计算设备在空间中的姿态。这通常涉及到三个轴向:俯仰(pitch)、横滚(roll)和偏航(yaw)。
-
校准和误差处理: 磁力计受到周围磁场干扰的影响可能较大,因此需要进行校准和误差处理。这可能涉及到软件层面的算法,用于消除由于附近金属物体或电气设备产生的磁场干扰。
-
确定特定坐标下的姿态: 一旦获得了准确的朝向和姿态信息,可以结合地理位置数据(如GPS提供的坐标)来确定设备在特定坐标(如东北天或北东地)下的具体姿态。
磁阻传感器的材质是他们对磁场很敏感,故他们可以很精确的感应到磁场的变化,但相应的其很容易收到干扰。














 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









