






为了记录一下学习过程与遇到的错误,如有错误欢迎讨论。
1.LQR(参考忠厚老实的老王)https://www.bilibili.com/video/BV1Py4y1B7ab/?spm_id_from=333.999.0.0&vd_source=33be2788fe5983a88368a312539f40fb
-
规划参数接口
参考轨迹给出不同点的x_r,y_r,\theta_r,k_r,通过carsim反馈的位置搜索找到最近的投影点进行误差计算
function [k,err] = fcn( x,y,phi,vx,vy,phi_dot,xr,yr,thetar,kappar) n=length(xr); dmin=(x-xr(1))^2+(y-yr(1))^2; min=1; for i=1:n d=(x-xr(i))^2+(y-yr(i))^2; if d<dmin dmin=d; min=i; end end dmin=min; tor=[cos(thetar(dmin));sin(thetar(dmin))]; nor=[-sin(thetar(dmin));cos(thetar(dmin))]; d_err=[x-xr(dmin);y-yr(dmin)]; ed=nor'*d_err; es=tor'*d_err; %theta=thetar(dmin); theta=thetar(min)+kappar(min)*es; ed_dot=vy*cos(phi-theta)+vx*sin(phi-theta); ephi=sin(phi-theta); s_dot=(vx*cos(phi-theta)-vy*sin(phi-theta))/(1-kappar(dmin)*ed); ephi_dot=phi_dot-kappar(dmin)*s_dot; k=kappar(dmin); err=[ed;ed_dot;ephi;ephi_dot]; end在后边横纵向控制中,规划接口被改为带有时间序列的x_r,y_r,\theta_r,k_r,也就是可以通过clock模块得到目标点的位置信息。下图为规划的道路+代码。
-
-
LQR求解过程
求解Raccati黎卡提方程,过程公式未推导,总而言之就是利用lqr工具箱得到反馈矩阵K,则控制量为-K*x
-
a=1.015; b=2.910-1.015; m=1270+88.6; I=1536.7; Cf=-17580*2; Cr=Cf; k=zeros(5000,4); %%这里是规定0.01s的时长递进,最大速度是50m/s,离线的lqr可以通过查找速度来得到对应的K,从而得到u=-kx for i=1:5000 vx=0.01*i; A=[0,1,0,0; 0,(Cf+Cr)/(m*vx),-(Cf+Cr)/m,(a*Cf-b*Cr)/(m*vx); 0,0,0,1; 0,(a*Cf-b*Cr)/(I*vx),-(a*Cf-b*Cr)/I,(a^2*Cf+b^2*Cr)/(I*vx) ]; B=[0;-Cf/m;0;-a*Cf/I]; Q=eye(4); R=100; k(i,:)=lqr(A,B,Q,R); end k1 = k(:,1)'; k2 = k(:,2)'; k3 = k(:,3)'; k4 = k(:,4)';%%转置是为了将k1,k2,k3,k4从工作区导入simulink中这里的K矩阵的通过车速进行查表得到的,再加上一个动力学模型中的前馈过程,得到前轮转角u。
2.MPC
动力学模型与误差计算参考的是忠厚老实的老王。代码参考https://blog.csdn.net/CHD_Apple/article/details/133919745
-
一般看到的是增量形势的增广式动力学模型,这里采用的是直接求解前轮转角的动力学模型。
这里有几点需要注意的。
-
预测时域与控制时域的区别
一般来说控制时域Nc小于预测时域Np,dr_can的书中取的是相等。尽管从x(k+Np)=A*x(k+Np-1)+B*u(k+Np-1)推断来看,预测到Np步需要Np-1步的控制量,然而我们可以利用Nc步的控制量代替后边的Nc+1,Nc+2......Np-1步,这样可以减少一点计算量,更多的可以利用热启动,也就是启发式来减少计算量。
-
增量与非增量的区别
增量的动力学模型会利用一个kesai向量来增广控制量,从而得到控制量增量的动力学模型。因此相比直接求解控制量而言,增量方程的代码会多一段求解新的A和B矩阵,随后再升维。
-
利用s-function与simulink模型可以直接得到车辆的状态更新,mdlupdate好像没有什么用
function [sys,x0,str,ts] = mpc(t,x,u,flag) switch flag, case 0, [sys,x0,str,ts]=mdlInitializeSizes; case 2, sys=mdlUpdate(t,x,u); case 3, sys=mdlOutputs(t,x,u); case {1,4,9}, sys=[]; otherwise DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag)); end %%初始化 function [sys,x0,str,ts]=mdlInitializeSizes sizes = simsizes; sizes.NumContStates = 0; sizes.NumDiscStates = 4;%状态量 sizes.NumOutputs = 1; sizes.NumInputs = 6; sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1; global U;%定义全局变量U用来保存控制量 U = [0]; sys = simsizes(sizes); x0 = [0.0001;0.0001;0.0001;0.0001];%状态量初始化 str = []; % 保留变量一般都为空 ts = [0.1,0];%采样时间和偏置 simStateCompliance = 'UnknownSimState'; %状态更新,但是好像没什么用。。。后边的状态更新都是从输入向量得到的 function sys=mdlUpdate(t,x,u) sys = x; %更新下一个离散状态即x(k+1) %输出 function sys=mdlOutputs(t,x,u) global A B C; global kesai; Nx = 4;%状态量个数 Nu = 1;%控制量个数 Np = 20;%预测时域 Nc = 15;%控制时域 a=1.015; b=2.910-1.015; m=1270+88.6; I=1536.7; Cf=-148970; Cr=-82204; dt=0.1; vx=u(1);%常量 kesai=zeros(Nx,1); kesai(1)=u(2); kesai(2)=u(3); kesai(3)=u(4); kesai(4)=u(5); phi_dot=u(6); if vx == 0 % 处理 vx 为零的情况,可以设置一个默认值或采取其他合适的措施 vx = 1e-6; % 一个很小的非零值 end A1=[0,1,0,0; 0,(Cf+Cr)/(m*vx),-(Cf+Cr)/m,(a*Cf-b*Cr)/(m*vx); 0,0,0,1; 0,(a*Cf-b*Cr)/(I*vx),-(a*Cf-b*Cr)/I,(a*a*Cf+b*b*Cr)/(I*vx)]; B1=[0;-Cf/m;0;-a*Cf/I]; C1=[0;(a*Cf-b*Cr)/(m*vx)-vx;0;(a*a*Cf+b*b*Cr)/(I*vx)]; A=A1*dt+eye(4);%离散化 B=B1*dt; C=C1*dt*(phi_dot-u(4)); q=[1000,0,0,0; 0,10,0,0; 0,0,100,0; 0,0,0,10]; Q=kron(eye(Np),q); R = 10*eye(Nu*Nc); %%构建预测方程矩阵 PHI_cell = cell(Np,1); THETA_cell = cell(Np,Nc); cc_cell=cell(Np,1); for i = 1:Np PHI_cell{i,1} = A^i; for j = 1:Nc if i>= j THETA_cell{i,j} = A^(i-j)*B; else THETA_cell{i,j} = zeros(Nx,Nu); end end end cc_cell{1,1} = C; for i=2:Np cc_cell{i,1} = cc_cell{i-1,1} + A^(i-1)*C; end PHI = cell2mat(PHI_cell); THETA = cell2mat(THETA_cell); cc = cell2mat(cc_cell); %%构造二次规划的矩阵 H_cell = cell(1,1); H_cell{1,1} = THETA'*Q*THETA + R; H = cell2mat(H_cell); H = 0.5*(H+H');%保证正定 f_cell = cell(1,1); err = PHI*kesai+cc; f_cell{1,1} = err'*Q*THETA; f = cell2mat(f_cell); f = f';%这里是为了对应matlab中的quadprog,可以help看一下 % %上下界约束 % M= 10;%松弛因子上界 u_umin = -1; % 0.0082rad = 0.47deg u_umax = 1; U_Umin = kron(ones(Nc,1),u_umin); U_Umax = kron(ones(Nc,1),u_umax); lb = -1; ub = 1; %%开始求解 options = optimset('Algorithm','interior-point-convex'); %options = optimset('Algorithm','active-set'); X = quadprog(H,f,[],[],[],[],lb,ub,[],options); %%计算输出 out = X(1); sys =out ;可以看到横向控制的结果
-
-
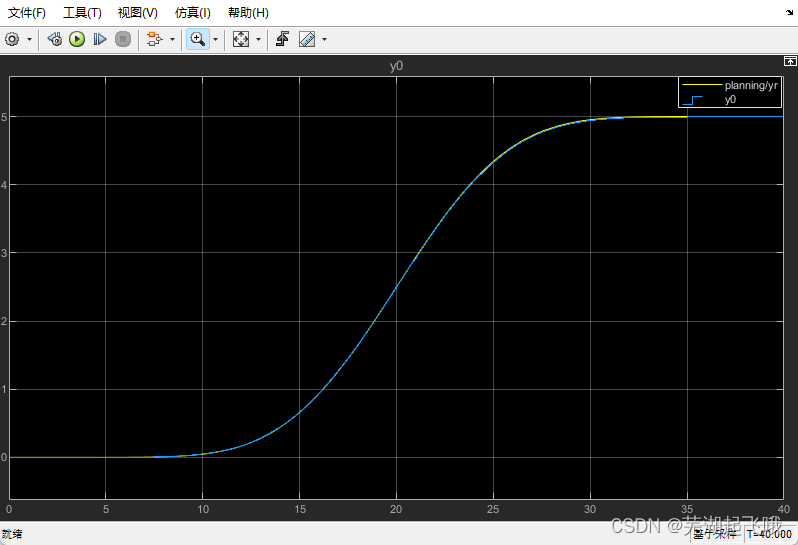
这里的问题是由于纵向速度vx一直在变化,AB矩阵一直在改变,那么无法像LQR那样与纵向协同控制。猜测是不是只能利用三自由度车辆动力学模型进行控制。















 3522
3522











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









