






 本文详细介绍了坐标变换在计算机视觉中的应用,包括世界坐标系、相机坐标系、图像坐标系和像素坐标系的关系。重点讲解了如何通过相机内参数矩阵和外参数矩阵进行坐标转换,以及如何使用OpenCV库中的solvePnP函数进行标定和坐标计算,最后提到了Halcon格式的内参参数转换方法。
本文详细介绍了坐标变换在计算机视觉中的应用,包括世界坐标系、相机坐标系、图像坐标系和像素坐标系的关系。重点讲解了如何通过相机内参数矩阵和外参数矩阵进行坐标转换,以及如何使用OpenCV库中的solvePnP函数进行标定和坐标计算,最后提到了Halcon格式的内参参数转换方法。
坐标变换详解
提示:这里可以添加技术概要
1.1 坐标关系
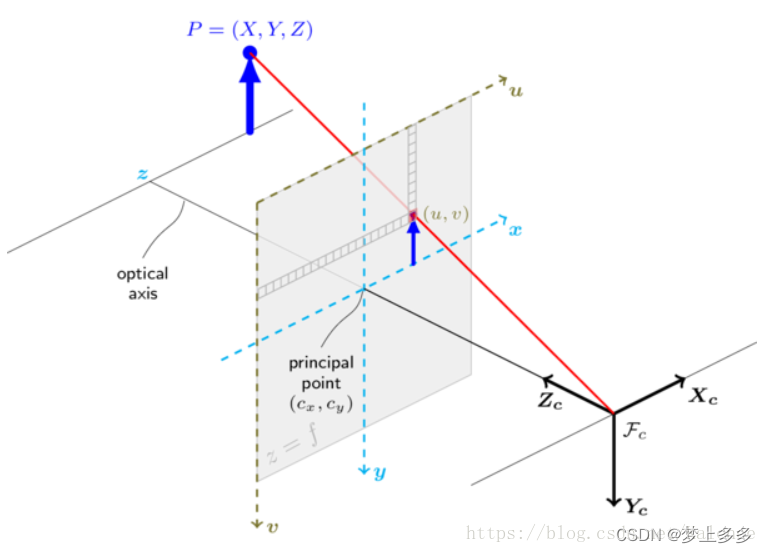
相机中有四个坐标系,分别为world,camera,image,pixel
- world为世界坐标系,可以任意指定 x w x_{w} xw轴和 y w y_w yw轴,为上图P点所在坐标系。
- camera为相机坐标系,原点位于小孔,z轴与光轴重合,轴和轴平行投影面,为上图坐标系 X c Y c Z c X_{c}Y_{c}Z_{c} XcYcZc。
- image为图像坐标系,原点位于光轴和投影面的交点,轴和轴平行投影面,为上图坐标系xy。
- pixel为像素坐标系,从小孔向投影面方向看,投影面的左上角为原点,uv轴和投影面两边重合,该坐标系与图像坐标系处在同一平面,但原点不同。
1.2 坐标转换
下式为像素坐标pixel与世界坐标world的转换公式,右侧第一个矩阵为相机内参数矩阵,第二个矩阵为相机外参数矩阵。假设图像坐标已知,同时相机内参数矩阵通过标定已获取,还需计算比例系数s和外参数矩阵。
s
[
u
v
1
]
=
[
f
x
0
c
x
0
f
y
c
y
0
0
1
]
[
r
11
r
12
r
13
t
1
r
21
r
22
r
23
t
2
r
31
r
32
r
33
t
3
]
[
x
y
z
1
]
s\begin{bmatrix} u\\v\\1 \end{bmatrix} =\begin{bmatrix} f_x&0&c_x\\0&f_y&c_y\\0&0&1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12}&r_{13}&t_1 \\ r_{21} & r_{22}&r_{23}&t_2 \\ r_{31} & r_{32}&r_{33}&t_3 \end{bmatrix} \begin{bmatrix} x\\y\\z\\1 \end{bmatrix}
s
uv1
=
fx000fy0cxcy1
r11r21r31r12r22r32r13r23r33t1t2t3
xyz1
转换公式可简化为:
s [ u v 1 ] = M ( R [ X Y Z c o n s t ] + t ) s\begin{bmatrix} u\\v\\1 \end{bmatrix} =M(R\begin{bmatrix} X\\Y\\Z_{const} \end{bmatrix}+t) s uv1 =M(R XYZconst +t)
s为比例系数, M为相机内参数矩阵,R为旋转矩阵,t为平移矩阵, Z c o n s t Z_{const} Zconst为世界坐标系高度,可设置为0。
通过矩阵变换可得下式:
R − 1 M − 1 s [ u v 1 ] = [ X Y Z c o n s t ] + R − 1 t R^{-1}M^{-1}s\begin{bmatrix} u\\v\\1 \end{bmatrix} =\begin{bmatrix} X\\Y\\Z_{const} \end{bmatrix}+R^{-1}t R−1M−1s uv1 = XYZconst +R−1t
求解出旋转矩阵和平移矩阵即可算得s。
外参矩阵
提示:这里可以添加技术整体架构
外参数矩阵
bool solvePnP(InputArray objectPoints,
InputArray imagePoints,
InputArray cameraMatrix,
InputArray distCoeffs,
OutputArray rvec,
OutputArray tvec,
bool useExtrinsicGuess=false,
int flags=ITERATIVE )
- objectPoints,输入世界坐标系中点的坐标;
- imagePoints,输入对应图像坐标系中点的坐标;
- cameraMatrix, 相机内参数矩阵;
- distCoeffs, 畸变系数;
- rvec, 旋转向量,需输入一个非空Mat,需要通过cv::Rodrigues转换为旋转矩阵;
- tvec, 平移向量,需输入一个非空Mat;
- useExtrinsicGuess, 默认为false,如果设置为true则输出输入的旋转矩阵和平移矩阵;
- flags,选择采用的算法;
- solvePnP的参数rvec和tvec应该都是double类型的
程序实现
提示:这里可以添加技术名词解释
(1)计算参数s和旋转平移矩阵,需要输入一系列的世界坐标系的点及其对应的图像坐标系的点。
//输入参数
Mat cameraMatrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); /* 摄像机内参数矩阵 */
Mat distCoeffs = Mat(1, 5, CV_32FC1, Scalar::all(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */
double zConst = 0;//实际坐标系的距离,若工作平面与相机距离固定可设置为0
//计算参数
double s;
Mat rotationMatrix = Mat (3, 3, DataType<double>::type);
Mat tvec = Mat (3, 1, cv::DataType<double>::type);
void calcParameters(vector<cv::Point2f> imagePoints, vector<cv::Point3f> objectPoints)
{
//计算旋转和平移
Mat rvec(3, 1, cv::DataType<double>::type);
cv::solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs, rvec, tvec);
cv::Rodrigues(rvec, rotationMatrix);
}
(2)根据输入的图像坐标计算世界坐标。
Point3f getWorldPoints(Point2f inPoints)
{
//获取图像坐标
cv::Mat imagePoint = cv::Mat::ones(3, 1, cv::DataType<double>::type); //u,v,1
imagePoint.at<double>(0, 0) = inPoints.x;
imagePoint.at<double>(1, 0) = inPoints.y;
//计算比例参数S
cv::Mat tempMat, tempMat2;
tempMat = rotationMatrix.inv() * cameraMatrix.inv() * imagePoint;
tempMat2 = rotationMatrix.inv() * tvec;
s = zConst + tempMat2.at<double>(2, 0);
s /= tempMat.at<double>(2, 0);
//计算世界坐标
Mat wcPoint = rotationMatrix.inv() * (s * cameraMatrix.inv() * imagePoint - tvec);
Point3f worldPoint(wcPoint.at<double>(0, 0), wcPoint.at<double>(1, 0), wcPoint.at<double>(2, 0));
return worldPoint;
}
Opencv相机标定
提示:这里可以添加技术细节
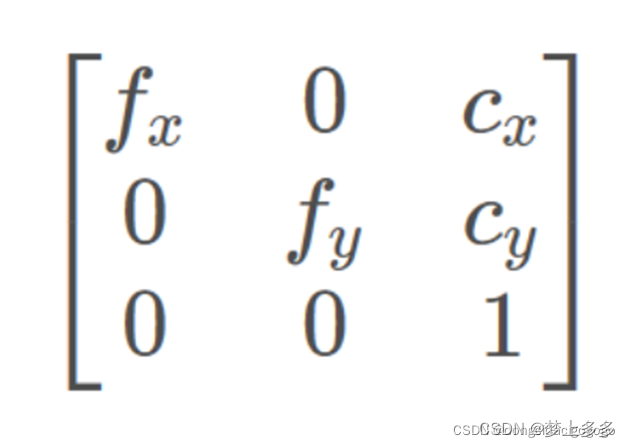
内参矩阵:
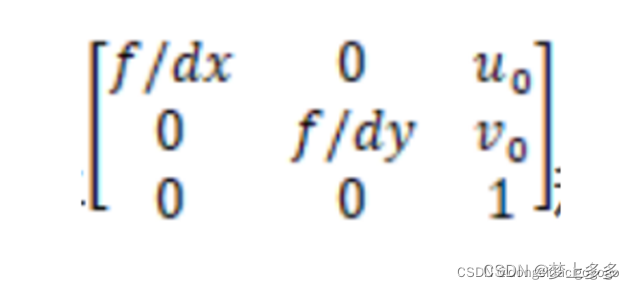
或
内参矩阵参数含义:
f:焦距,单位毫米;dx:像素x方向宽度,单位毫米;1/dx:x方向1mm内有多少个像素;
f/dx:使用像素来描述x轴方向的焦距的长度
f/dy:使用像素来描述y轴方向的焦距的长度
u0,v0为主点的实际位置,单位也是毫米。
Halcon格式
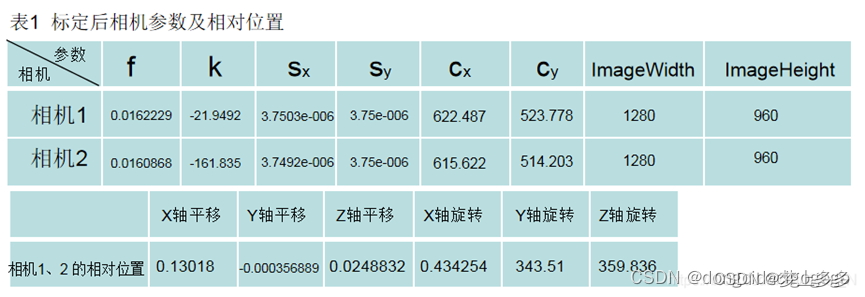
内参参数转换:
fx = f/sx ; fy = f/sy;u0 = cx ; v0 = cy ;
参考
提示:这里可以添加总结
- 图像坐标与世界坐标转换
- http://answers.opencv.org/question/62779/image-coordinate-to-world-coordinate-opencv/
- https://stackoverflow.com/questions/12299870/computing-x-y-coordinate-3d-from-image-point
- https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html
















 3346
3346











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











