







【机器人动力学】——运动和受力的描述
一、运动的描述
- 速度:位置向量的微分
B V Q = d d t B P Q = lim Δ t → 0 B P Q ( t + Δ t ) − B P Q ( t ) Δ t {}^BV_Q=\frac{d}{dt}{}^BP_Q=\lim_{\Delta t\to0}\frac{^BP_Q(t+\Delta t)-^BP_Q(t)}{\Delta t} BVQ=dtdBPQ=Δt→0limΔtBPQ(t+Δt)−BPQ(t)
- 注意其是在哪个坐标系下的表达。
-
角速度: 3 × 1 3\times1 3×1的向量
若单位向量 e ^ ( t ) \hat e(t) e^(t)相对于转轴 ω → \overrightarrow \omega ω(相对于世界坐标系)旋转,则:
e ^ ˙ = ω → × e ^ \dot{\hat e}=\overrightarrow \omega \times \hat e e^˙=ω×e^
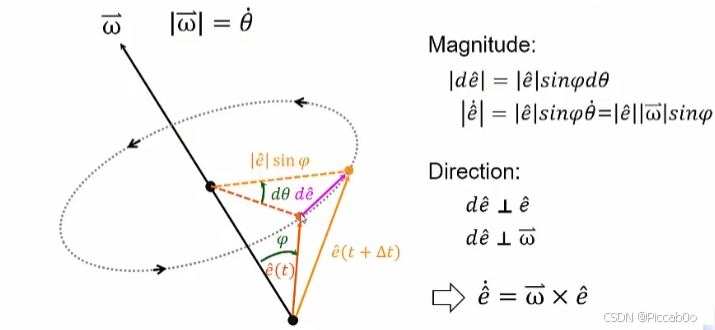
- 注意1:这里的结论只针对单位向量成立,对于一般向量不成立(长度改变)!
- 注意2:一般这个式子最后都会写成在世界坐标系下的表达。
二、刚体的运动
- 位置向量的分解:

r A → = x A I ^ + y A J ^ = r B → + r A / B → = ( x B I ^ + y B J ^ ) + ( x A / B I ^ + y A / B J ^ ) = ( x B I ^ + y B J ^ ) + ( x A / B i ^ + y A / B j ^ ) \begin{aligned} \overrightarrow{r_{A}}&=x_{A}\hat{I}+y_{A}\hat{J}\\ &=\overrightarrow{\mathrm{r}_{B}}+\overrightarrow{\mathrm{r}_{A/B}} \\ &=(\mathrm{x}_{B}\hat{I}+\mathrm{y}_{B}\hat{J})+(\mathrm{x}_{A/B}\hat{I}+\mathrm{y}_{A/B}\hat{J}) \\ &=(\mathrm{x}_{B}\hat{I}+\mathrm{y}_{B}\hat{J})+(x_{A/B}\hat{i}+y_{A/B}\hat{j}) \end{aligned} rA=xAI^+yAJ^=rB+rA/B=(xBI^+yBJ^)+(xA/BI^+yA/BJ^)=(xBI^+yBJ^)+(xA/Bi^+yA/Bj^)
- 注意1:这里的 x x x与 x \mathrm{x} x分别代表在ijk和IJK坐标系下的表达。
-
速度的分解:
若ijk坐标系相对于IJK有转动,对上式进行微分,有:
v A → = r B → ˙ I ^ + r A / B → ˙ J ^ = ( x B ˙ I ^ + y B ˙ J ^ ) + ( x A / B ˙ i ^ + y A / B ˙ j ^ ) + ( x A / B i ^ ˙ + y A / B j ^ ˙ ) = ( x B ˙ I ^ + y B ˙ J ^ ) + ( x A / B ˙ i ^ + y A / B ˙ j ^ ) + [ x A / B ( ω → × i ^ ) + y A / B ( ω → × j ^ ) ] = ( x B ˙ I ^ + y B ˙ J ^ ) + ( x A / B ˙ i ^ + y A / B ˙ j ^ ) + [ x A / B ( ω → × I ^ ) + y A / B ( ω → × J ^ ) ] \begin{aligned} \overrightarrow{v_{A}}&=\dot{\overrightarrow{r_{B}}}\hat{I}+\dot{\overrightarrow{r_{A/B}}}\hat{J}\\ &=(\dot{\mathrm{x}_{B}}\hat{I}+\dot{\mathrm{y}_{B}}\hat{J})+(\dot{x_{A/B}}\hat{i}+\dot{y_{A/B}}\hat{j})+(x_{A/B}\dot{\hat{i}}+y_{A/B}\dot{\hat{j}})\\ &=(\dot{\mathrm{x}_{B}}\hat{I}+\dot{\mathrm{y}_{B}}\hat{J})+(\dot{x_{A/B}}\hat{i}+\dot{y_{A/B}}\hat{j})+[x_{A/B}(\overrightarrow \omega \times \hat{i})+y_{A/B}(\overrightarrow \omega \times \hat{j})]\\ &=(\dot{\mathrm{x}_{B}}\hat{I}+\dot{\mathrm{y}_{B}}\hat{J})+(\dot{x_{A/B}}\hat{i}+\dot{y_{A/B}}\hat{j})+[\mathrm{x}_{A/B}(\overrightarrow \omega \times \hat{I})+\mathrm{y}_{A/B}(\overrightarrow \omega \times \hat{J})] \end{aligned} vA=rB˙I^+rA/B˙J^=(xB˙I^+yB˙J^)+(xA/B˙i^+yA/B˙j^)+(xA/Bi^˙+yA/Bj^˙)=(xB˙I^+yB˙J^)+(xA/B˙i^+yA/B˙j^)+[xA/B(ω×i^)+yA/B(ω×j^)]=(xB˙I^+yB˙J^)+(xA/B˙i^+yA/B˙j^)+[xA/B(ω×I^)+yA/B(ω×J^)]
-
注意1:一般,都写作在世界坐标系下的表达。

上式,利用机器人学的表达可以写作:
A V Q = A V B + B A R B V Q + A Ω B × ( B A R B P Q ) {}^AV_Q={}^AV_B+{}^A_BR{}^BV_Q+{}^A\Omega_B\times({}^A_BR{}^BP_Q) AVQ=AVB+BARBVQ+AΩB×(BARBPQ)
三、连杆系统下的表达
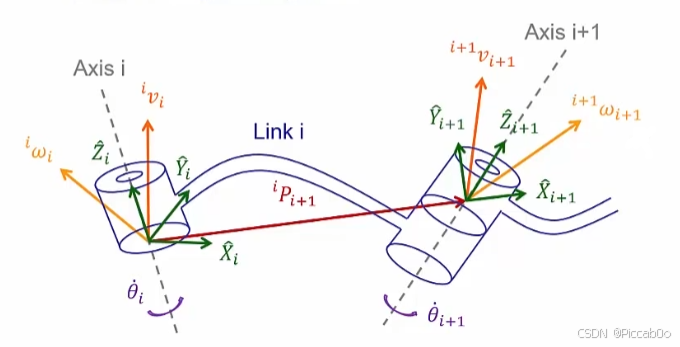
(一)i+1相对于i有转动的情况:
-
连杆系统下的角速度:
从i坐标系看,有:
i ω i + 1 = i ω i + i + 1 i R ( θ ˙ i + 1 Z ^ i + 1 ) {}^i\omega_{i+1}={}^i\omega_{i}+{}^i_{i+1}R(\dot\theta_{i+1}\hat Z_{i+1}) iωi+1=iωi+i+1iR(θ˙i+1Z^i+1)含义是:本身旋转加上i+1的旋转。
- 注意1: 转到i+1坐标系下的表达,只需要乘上变换矩阵即可。
-
连杆系统下的线速度:
从i坐标系看,有:
i v i + 1 = i v i + i ω i × i P i + 1 {}^iv_{i+1}={}^iv_i+{}^i\omega_i\times{}^iP_{i+1} ivi+1=ivi+iωi×iPi+1含义是:本身的速度加上,转动引起的附加速度。
(二)i+1相对于i有移动的情况:
-
连杆系统下的角速度:
从i坐标系看,有:
i ω i + 1 = i ω i {}^i\omega_{i+1}={}^i\omega_{i} iωi+1=iωi -
连杆系统下的线速度:
从i坐标系看,有:
i v i + 1 = ( i v i + i ω i × i P i + 1 ) + i R i + 1 ( d ˙ i + 1 Z ^ i + 1 ) {}^iv_{i+1}=({}^iv_{i}+{}^i\omega_i\times{}^iP_{i+1})+{}^iR_{i+1}(\dot d_{i+1}\hat Z_{i+1}) ivi+1=(ivi+iωi×iPi+1)+iRi+1(d˙i+1Z^i+1)
四、力和力矩
- 注意1:对于速度和角速度来说,是从首端向末端算。但对于力和力矩而言,恰恰相反,是从末端向首端算的。
i f i = i f i + 1 = i + 1 i R i + 1 f i + 1 i n i = i n i + 1 + i P i + 1 × i f i + 1 = i + 1 i R i + 1 n i + 1 + i + 1 P × i f i + 1 \begin{aligned} {}^if_i&={}^if_{i+1}={}^i_{i+1}R{}^{i+1}f_{i+1}\\ \\ {}^in_i&={}^in_{i+1}+{}^iP_{i+1}\times{}^if_{i+1}\\&={}^i_{i+1}R{}^{i+1}n_{i+1}+{}^P_{i+1}\times{}^if_{i+1} \end{aligned} ifiini=ifi+1=i+1iRi+1fi+1=ini+1+iPi+1×ifi+1=i+1iRi+1ni+1+i+1P×ifi+1
- 注意2:在叉乘 × \times ×运算中,往往利用反对称矩阵的形式简化计算:
P × R = [ 0 − p z p y p z 0 − p x − p y p x 0 ] R P\times R=\begin{bmatrix} 0 & -p_z & p_y \\ p_z & 0 & -p_x \\ -p_y & p_x & 0 \end{bmatrix}R P×R= 0pz−py−pz0pxpy−px0 R



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









