








 本文介绍了D-H法(Denavit-Hartenberg)在机器人运动学建模中的原理和应用,包括标准D-H法和改进D-H法的区别。标准D-H法将坐标系置于连杆末端,而改进D-H法则将其置于连杆首段。通过齐次变换矩阵,可以推导出末端执行器相对于基坐标系的位姿,从而建立运动学方程。文章还提到了MATLAB在实现这两种建模方法中的应用,并进行了比较分析。
本文介绍了D-H法(Denavit-Hartenberg)在机器人运动学建模中的原理和应用,包括标准D-H法和改进D-H法的区别。标准D-H法将坐标系置于连杆末端,而改进D-H法则将其置于连杆首段。通过齐次变换矩阵,可以推导出末端执行器相对于基坐标系的位姿,从而建立运动学方程。文章还提到了MATLAB在实现这两种建模方法中的应用,并进行了比较分析。
D-H法机械臂建模
D-H建模方法是由D和H两个人提出的,是用于机器人运动学上的建模方法,该方法是在每个连杆上建立一个坐标系,通过齐次变换来实现两个连杆上的坐标变换。
通过依次的变换最终可以推导处末端执行器相对于基坐标系的位姿,从而建立机器人的运动学方程,该方法通常叫标准的DH建模方法。
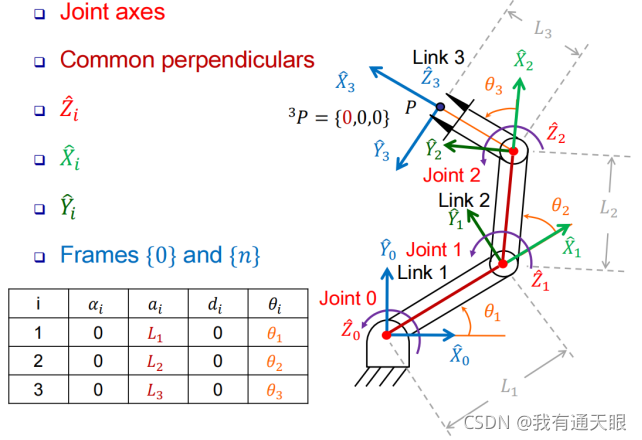
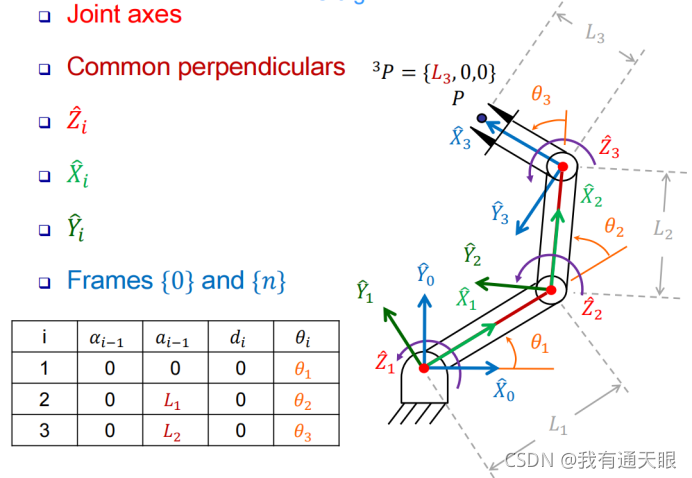
标准D-H法(SDH)把坐标系建立在机械臂连杆末端,改进D-H法(MDH)把坐标系建立在连杆首段。
标准DH法,参数下标均为i:
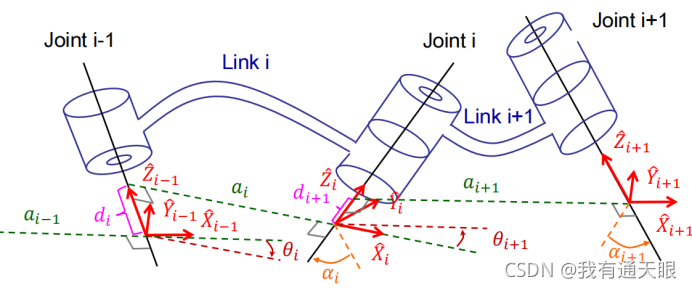
连杆角度θi:Xi-1到Xi沿Zi-1的转角。
连杆偏距di: Xi-1到Xi沿Zi-1的距离。
连杆长度ai:Zi-1到Zi沿Xi的距离。
连杆转角αi:Zi-1到Zi沿Xi的转角。
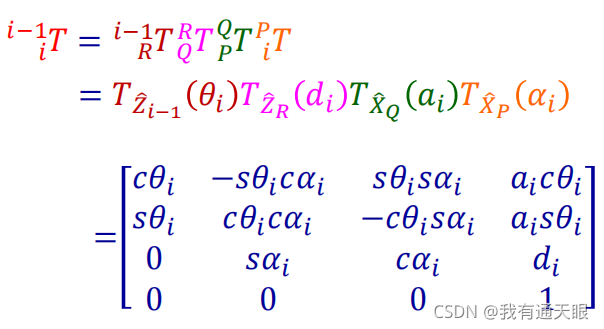
转动的顺序有所不同
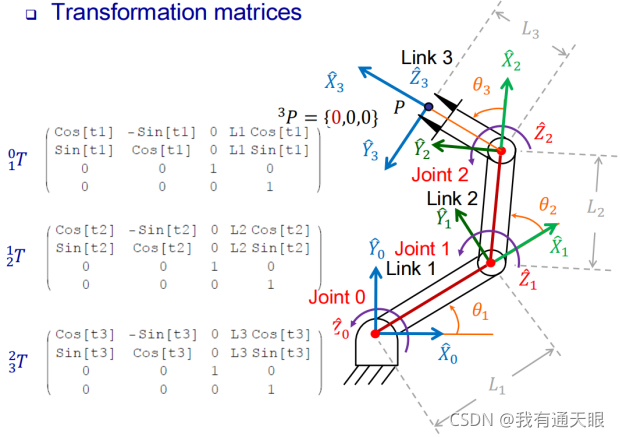
坐标系i在坐标系i-1中的描述,即变换矩阵。
改进DH法,参数分别为αi-1,ai-1,di,θi:
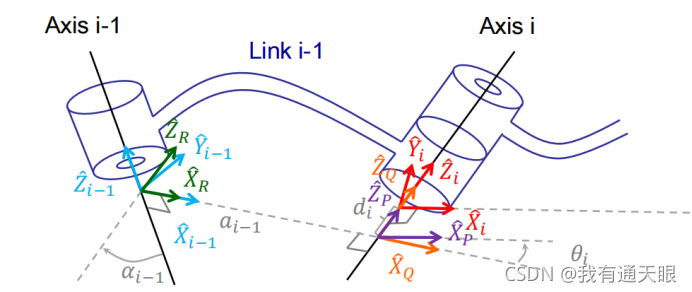
连杆转角αi-1:以Xi-1的方向看,Zi-1到Zi间的夹角。
连杆长度ai-1:沿Xi-1的方向,Zi-1到Zi间的距离。
连杆角度θi:以Zi方向看,Xi-1到Xi的夹角,逆正顺负。
连杆偏距di: 沿着Zi方向 Xi-1到Xi间的距离。
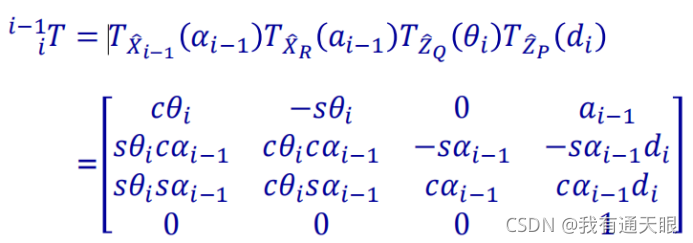
坐标系i在坐标系i-1中的描述,即变换矩阵。
(精准的量化表达)
总的变换矩阵:

串联连续连乘
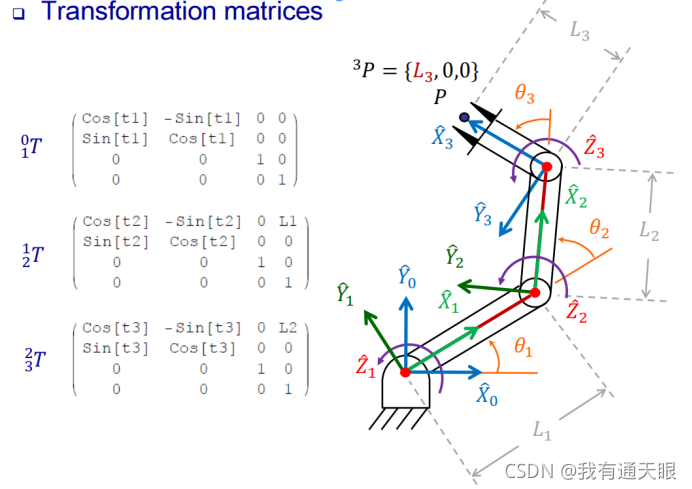
机械臂采用改进D-H法建系如下:
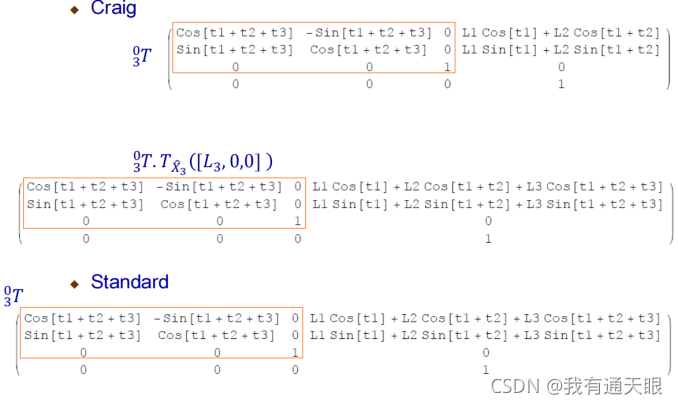
机械臂末端执行器位姿: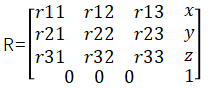
例子:
SDH:标准DH法
MDH:改进DH法
MATLAB实现建模对比分析:
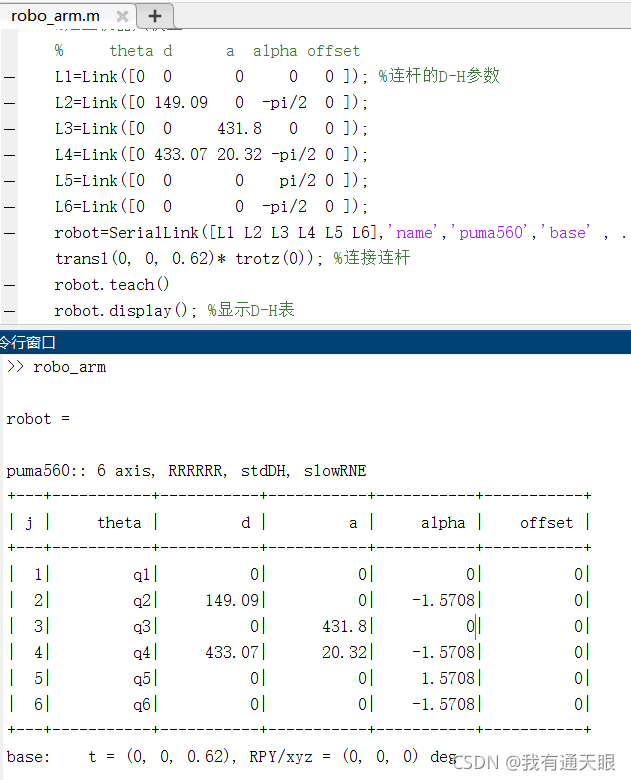
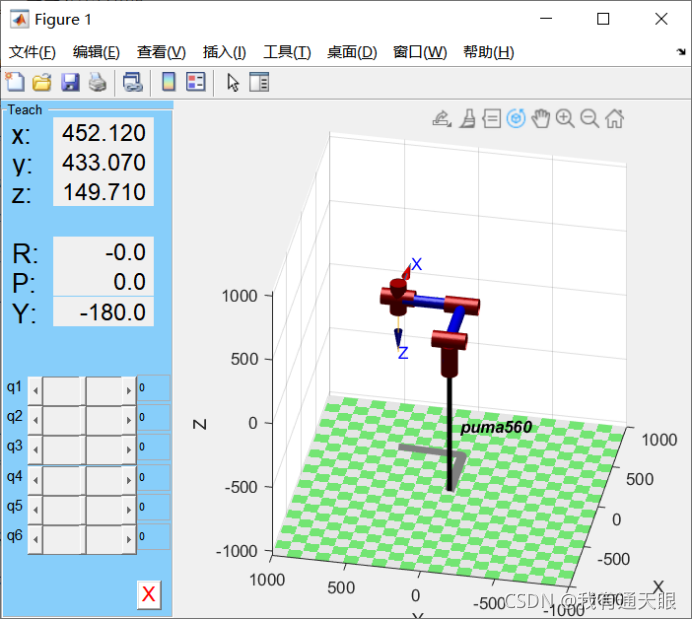
利用matlab机器人工具箱 建模
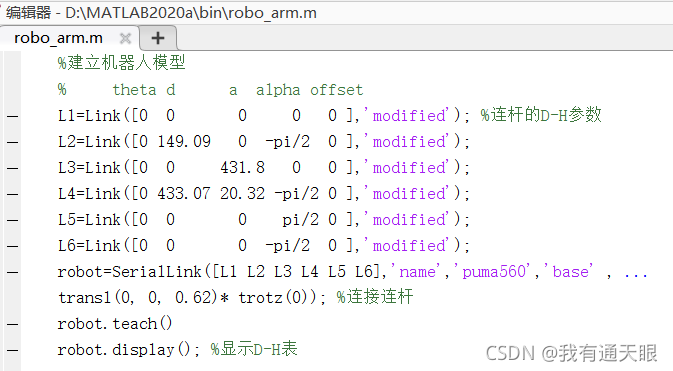
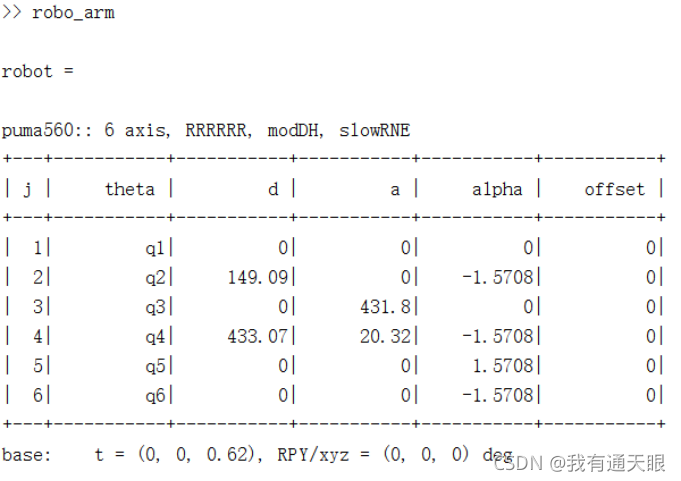
标准DH法建模:

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









